

Тема 4.
4.4.1.
Определить магнитный поток![]() МПТ, если электромагнитный момент
МПТ, если электромагнитный момент![]() ,
ток якоря
,
ток якоря![]() ,
а
,
а![]() .
.
(Верный ответ – 0,01).
4.4.2. Предельная мощность МПТ определяется:
1. Условиями коммутации.
2. Частотой вращения якоря.
3. Величиной тока якоря.
4. ЭДС якоря.
Верный ответ – 1,2.
4.4.3.
Определить электрические
потери
![]() МПТ, если ток в обмотке якоря
МПТ, если ток в обмотке якоря![]() ,
,а ее активное сопротивления
,
,а ее активное сопротивления![]() .
.
(Верный ответ – 200).
4.4.4. Основные номинальные режимы работы МПИ определяются:
1. Временем ее эксплуатации.
2. Температурой обмоток.
3. Током нагрузки.
4. Моментом на валу.
Верный ответ – 1.
4.4.5.
Определить добавочные потери
![]() некомпенсированного ГПТ, если его
номинальная мощность
некомпенсированного ГПТ, если его
номинальная мощность![]() .
.
(Верный ответ – 75).
4.4.6.
Определить суммарные потери в
![]() МПТ, если подводимая и номинальная
мощности соответственно
МПТ, если подводимая и номинальная
мощности соответственно![]() и
и![]() .
.
(Верный ответ – 1200).
4.4.7. Электромагнитный момент ДПТ равен:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.
![]()
Верный ответ – 1.
4.4.8. Потери в МПТ:
Магнитные.
Электрические.
Механические.
Гравитационные.
Статические.
Динамические.
Верный ответ – 1,2,3.
4.4.9. Механические потери в МПТ – это потери:
В подшипниках.
На трение щеток о коллектор.
Вентиляционные.
В обмотках.
Пульсационные.
На вихревые токи и гистерезис.
Верный ответ – 1,2,3.
4.4.10. Магнитные потери в МПТ пропорциональны квадрату:
1. Магнитной индукции.
2. Тока.
3. Активного сопротивления обмотки якоря.
4. Индуктивного сопротивления обмотки якоря.
Верный ответ – 1.
4.4.11. Добавочные потери в МПТ зависят от:
1. Тока нагрузки.
2. Числа главных полюсов.
3. Числа параллельных ветвей обмотки якоря.
4. Типа обмотки.
Верный ответ – 1.
4.4.12. Электрические потери в МПТ зависят от квадрата:
Тока.
Магнитной индукции.
Частоты вращения.
ЭДС.
Верный ответ – 1.
ДЕ 5.
Тема 1.
5.1.1. Скоростная характеристика ДПТ последовательного возбуждения:

1. 6.
2. 3.
3. 5.
4. 2.
Верный ответ – 1.
5.1.2. Скоростная характеристика ДПТ параллельного возбуждения:

1. 3.
2. 1.
3. 5.
4. 6.
Верный ответ – 1.
5.1.3. Моментная характеристика ДПТ последовательного возбуждения:
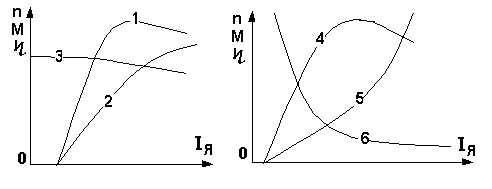
1. 5.
2. 3.
3. 6.
4. 1.
Верный ответ – 1.
5.1.4. Характеристика холостого хода ГПТ с независимым возбуждением:

2.
6.
4.
3.
Верный ответ – 1.
5.1.5. Внешняя характеристика ГПТ с независимым возбуждением:

6.
1.
4.
5.
Верный ответ – 1.
5.1.6. Внешняя характеристика ГПТ с параллельным возбуждением:

5.
3.
4.
6.
Верный ответ – 1.
5.1.7. Регулировочная характеристика ГПТ независимого возбуждения при активно-индуктивной нагрузке:

4.
7.
2.
6.
Верный ответ – 1.
5.1.8. Характеристики ДПТ последовательного возбуждения:
Скоростная.
Моментная.
Механическая.
Регулировочная.
Нагрузочная.
Внешняя.
Верный ответ – 1,2,3.
5.1.9. Скоростная характеристика ДПТ последовательного возбуждения:
Мягкая.
Гибкая.
Вязкая.
Жесткая.
Ломанная.
Верный ответ – 1.
5.1.10. Рабочие характеристики ДПТ параллельного возбуждения представляют собой зависимость:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4.![]()
5.![]()
Верный ответ – 1,2,3.
Тема 2.
5.2.1.
Определить частоту
вращения якоря
![]() МПТ, если:
МПТ, если:![]() ;
;![]() ;
;![]() ;
;![]() ;
;![]() .
.
(Верный ответ – 1000).
5.2.2. Частота вращения ДПТ уменьшилась с 3000 до 1000 об/мин. Магнитный поток остался без изменения, а ЭДС обмотки якоря уменьшилась в ….. раза.
1. 3.
2. 2.
3. 4.
4. 3,5.
Верный ответ – 1.
5.2.3. Наиболее широкий диапазон регулирования частоты вращения у ДПТ с возбуждением:
1. Последовательным.
2. Параллельным.
3. Смешанным.
4. Независимым.
Верный ответ – 1.
5.2.4.
Определить частоту вращения
![]() ГПТ с независимым возбуждением, если
известны напряжение холостого хода
ГПТ с независимым возбуждением, если
известны напряжение холостого хода![]() ,
магнитный поток
,
магнитный поток![]() и
и![]() .
.
3000 об/мин.
2857 об/мин.
1428 об/мин.
1500 об/мин.
Верный ответ – 1.
5.2.5. Частота вращения двигателя постоянного тока (ДПТ) регулируется путем изменения:
Магнитного потока.
Напряжения якоря.
Сопротивления цепи якоря.
Числа главных полюсов.
Числа параллельных ветвей обмотки якоря.
Режима работы.
Верный ответ – 1,2,3.
5.2.6.
Скорость ДПТ последовательного
возбуждения при![]() и
и![]() :
:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
4. Постоянная.
Верный ответ – 1.
5.2.7. Постоянство мощности на валу ДПТ параллельного возбуждения обеспечивает регулирование:
1. Частоты вращения вверх от номинальной.
2. Частоты вращения вниз от номинальной.
3. Момента вращения на валу.
4. Сопротивления обмотки добавочных полюсов.
Верный ответ – 1.
5.2.8. Постоянство момента вращения на валу ДПТ параллельного возбуждения обеспечивает регулирование:
1. Частоты вращения вниз от номинальной.
2. Частоты вращения вверх от номинальной.
3. Мощности на валу.
4. Сопротивления обмотки добавочных полюсов.
Верный ответ – 1,2.
5.2.9. Динамический момент вращения в МПТ возникает, когда частота вращения якоря:
1. Увеличивается.
2. Уменьшается.
3. Равна нулю.
4. Постоянная.
Верный ответ – 1,2.
5.2.10. Повышение частоты вращения ДПТ с последовательным возбуждением достигается шунтированием обмотки:
1. Возбуждения;
2. Якоря;
3. Компенсационной;
4. Добавочных полюсов.
Верный ответ – 1.
5.2.11. Уменьшение частоты вращения ДПТ с последовательным возбуждением обеспечивается шунтированием обмотки:
1. Якоря;
2. Возбуждения;
3. Компенсационной;
4. Добавочных полюсов.
Верный ответ – 1.
5.2.12. Регулирование частоты вращения изменением напряжения в ДПТ последовательного возбуждения позволяет сохранить высоким;
1. КПД.
2. Уровень температур отдельных частей машины.
3. Уровень потерь.
4. Потенциал между соседними коллекторными пластинами.
Верный ответ – 1.