

-
Дифференциальный (д) регулятор.
Дифференциальная составляющая пропорциональна темпу изменения отклонения регулируемой величины и предназначена для противодействия отклонениям от целевого значения, которые прогнозируются в будущем. Отклонения могут быть вызваны внешними возмущениями или запаздыванием воздействия регулятора на систему.
-
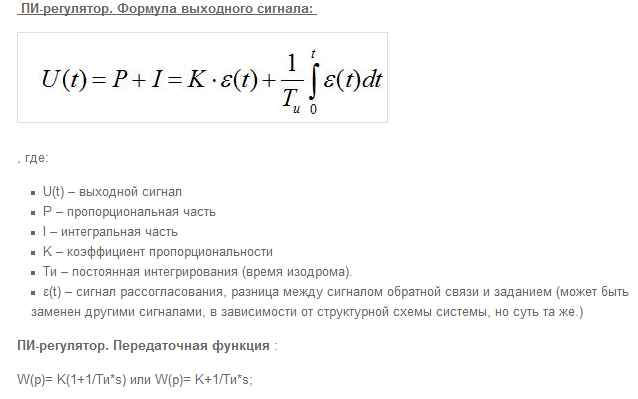
Пропорционально- интегральный (пи) регулятор.
ПИ-регулятор является одним из наиболее универсальных регуляторов. Фактически ПИ-регулятор – это П-регулятор с дополнительной интегральной составляющей. И-составляющая, дополняющая алгоритм, в первую очередь нужна для устранения статической ошибки, которая характерна для пропорционального регулятора. По сути, интегральная часть является накопительной, и таким образом позволяет осуществить то, что ПИ-регулятор учитывает в данный момент времени предыдущую историю изменения входной величины

-
Пропорционально- дифференциальный (пд) регулятор.
Пропорционально-дифференциальные регуляторы более сложны по структуре, чем пропорциональные и интегральные. Наличие двух параметров настройки усложняет методику выбора регулятора. Применение прпорционально-дифференциалъных регуляторов дает возможность увеличивать общее усиление при сохранении устойчивости системы, что резко улучшает качество протекания переходных процессов. Кроме того, пропорционально-дифференциальные регуляторы пригодны для стабилизации регулируемых систем с двумя нейтральными звеньями или с одним нейтральным и одним неустойчивым звеном. Повышение общего коэффициента усиления цепи регулирования приводит к уменьшению статических ошибок.
Сочетание пропорционального воздействия с дополнительным воздействием по производной использовано в пропорционально-дифференциальных регуляторах, или сокращенно ПД-регуляторах. [5]
Если при предельно возможных значениях параметров данного-регулятора систему стабилизировать нельзя, то пропорционально-дифференциальный регулятор неприменим для регулирования данного объекта с запаздыванием.
-
Пропорционально- интегрально-дифференциальный (пид) регулятор.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в управляющем контуре с обратной связью. Используется в системах автоматического управления для формирования управляющего сигнала с целью получения необходимых точности и качества переходного процесса. ПИД-регулятор формирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально разности входного сигнала и сигнала обратной связи (сигнал рассогласования), второе — интеграл сигнала рассогласования, третье — производная сигнала рассогласования.
ПИД-регулятор – самый сбалансированный из всех регуляторов, построенных на основе типовых звеньев, поэтому широко применяется в различных сферах.
По сути, даное устройство это эволюция ПИ-регулятора.
Пропорциональная составляющая вырабатывает сигнал, который противодействует отклонению регулируемой величины в данный момент времени (идеология чисто П-регулятора).
Интегральная составляющая накапливает результирующее значение, нивелируя, таким образом, недостаток П-регулятора – наличие статической ошибки.
ПИД-регулятор обладает Д-составляющей, которая как бы прогнозирует отклонение от задания и следит за скоростью отклонения, поэтому является самой быстрой в данном алгоритме. По сути, это является преимуществом и недостатком одновременно
