

Корганова, лекции
.pdfэлектромагнитные и ферродинамические измерительные механизмы.
Регистрирующие электромеханические приборы предназначены для регистраций медленно изменяющихся величин
(до 1 Гц).
Всостав регистрирующего органа входят следующие основные элементы: материал-носитель, регистрирующий орган для нанесения знаков регистрации, устройство для перемещения носителя. Положение регистрирующего органа на плоскости определяется количественным значением измеряемой величины.
Регистрация - представление измерительной информации в форме видимых или скрытых изображений, размещенных на некоторых материальных носителях (бумаге, магнитной или фотопленке и т. п.). При регистрации используются геометрические, физические и цифровые символы; отрезки линий; интенсивность намагничивания и цветочной окраски, степень почернения фотопленки; цифры, буквы, знаки и их комбинации.
Если носителем является бумага с сеткой, то приборы называются самопишущими.
Врегистрирующих приборах широко применяется метод регистрации нанесением слоя вещества на носитель: запись на диаграммной бумаге чернилами и пастой или печатанье.
К числу основных достоинств этих методов относятся долговечность документов, непосредственная видимость результата записи, удобный и дешевый носитель.
Основными элементами пишущего устройства является перо, капилляр чернильница. Причем чернильница может быть как подвижной, так и неподвижной. Недостатком такой записи являются; возможность отказа работы пишущего устройства из-за засорения пера, необходимость периодически заправлять устройство чернилами и т. д. Для устранения этих недостатков чернила подаются под давлением, разрабатываются специальные сорта чернил и т. п.
Используются красящие пасты и копировальная бумага. Применяется цифропечать. В таких приборах регистрирующим устройством является печатающая каретка. Кроме указателя на каретке закреплено металлическое колесо с выступами, на которых нанесены выпуклые знаки (точки или точки и цифры).
Печатание может осуществляться одной краской или быть многоцветным. Недостаток – потеря непрерывности.
Бумажные диаграммы обычно имеют форму ленты или диска
иснабжены градуировочной сеткой, которую выполняют в прямоугольной или полярной системе координат.
61
На смену рулонной упаковке приходит упаковка в пачки, где лента уложена в виде “гармошки”.
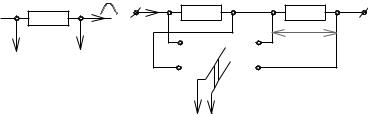
Существуют методы регистрации путем снятия слоя вещества носителя. В этом случае регистрирующий орган выполняется в виде стальной иглы, резца, стержня, нагретого током. В качестве носителя используется бумага, покрытая слоем сажи, воска или лака.
Методы регистрации изменением состояния вещества носителя представляют собой большую группу различных вариантов. Их разновидности:
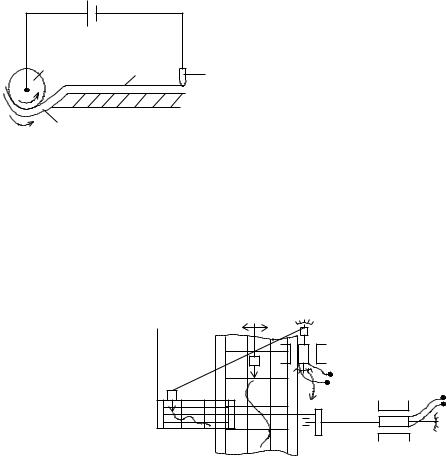
-Термический метод осуществляется путем теплового воздействия электрически нагретого элемента (теплового пера) на поверхностный слой теплочувствительной бумаги. При расплавлении поверхностного слоя на нем остается след от движения теплового пера в виде четкой темной линии. Используется запись на металлизированной бумаге.
|
E |
|
1-записывающий электрод |
|
|
|
2-барабан |
|
|
|
3-металлизированная бумага |
2 |
4 |
1 |
4-слой металла |
|
|
|
|
|
3 |
|
|
Проводником тока служит металлизированная бумага. Под действием тока металл подъэлектродом 1 плавится, и частично выгорает, в результате чего на поверхности носителя появляется темный след движения 1.
Фотографическая запись применяется в осциллографах. Регистрация осуществляется двумя способами x f (t) и
x1 f x2
б) |
x |
a) |
|
|
|
|
|
2 |
|
|
|
|
|
N |
S |
|
|
|
|
|
x 1 |
N |
x2 |
|
|
x |
1 |
||
|
|
|
|
|
|
|
|
|
|
S |
|
В первом случае носитель сторону с постоянной скоростью, синхронными или пружинными скорости.
перемещается только в одну т.е. пропорционально времени двигателями с регулятором
62
В устройствах, регистрирующих x1 f x2 перемещение диаграммной бумаги пропорционально x2 , а регистрирующего органа - x1 . При неподвижной диаграмме регистрирующий орган может перемещаться по двум взаимноперпендикулярным осям пропорционально x1 и x2 .
АИУ уравновешивающего преобразования
Рассмотрим вначале приборы уравновешивающего преобразования, в которых процесс уравновешивания осуществляется вручную и измеряемая величина сравнивается с образцовой мерой. Такие приборы называются также приборами сравнения.
Основой прибора сравнения (уравновешивающего преобразования) является измерительная схема сравнения (ИСС), под которой понимается совокупность элементов, объединенных в определенную схему и предназначенных для осуществления процесса сравнения. Все ИСС сводятся к двум – компенсационным и мостовым. Компенсационные ИСС предназначены для сравнения напряжений, мостовые – для сравнения сопротивлений.
Приборы, в которых используются компенсационные ИСС, называются компенсаторами, а приборы, в которых применяются мостовые ИСС называются мостами.
Компенсаторы постоянного тока
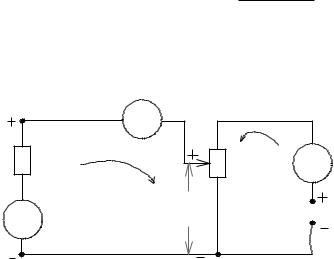
Рассмотрим схему: здесь в ИСС встречно включены U i и U k
I вх U i U k
Ri rr rk
U |
i |
U |
k |
I |
вх 0, если |
|
|
|
|
||
|
|
|
|
|
|
x |
|
r |
Г |
|
|
|
|
Г |
|
|
|
|
|
|
|
I |
|
R |
|
|
|
p |
A |
|
|
|
|
||
i |
|
|
|
|
|
I |
|
rK |
|
|
|
|
|
R |
|
||
|
вх |
|
|
p |
|
|
|
|
U |
|
|
U |
|
|
|
U |
|
|
|
K |
|
||
|
|
|
пит |
||
i |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
Т.е. U |
i |
скомпенсировано U |
k |
. Но U |
k |
I |
p |
r |
. Следует |
U i I p rk |
|
|
|
|
k |
|
|
63
Точность определения U i зависит от точности определения I p и rk . Если поддерживать I p const , то rk (т.е. R p ) можно отградуировать в единицах U i .
I вх 0 означает, что входное сопротивление прибора (с зажимом “ xx ”) равно , т.е. при полной компенсации от источника U i ток не отбирается, и не вносятся искажения в режим работы U i .
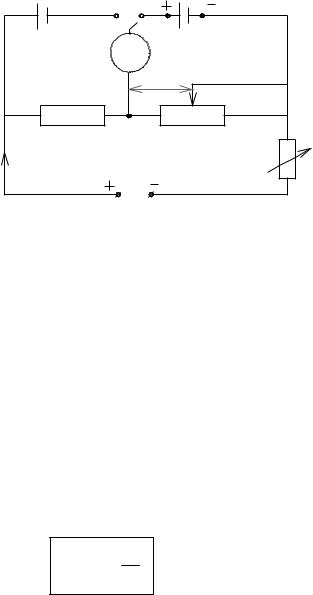
Чтобы |
обеспечить I p const используются нормальный |
элемент НЭ, |
и схема приводится к виду: |
EN |
1 |
к |
2 |
|
|
|
|
|
|
|
|
|
х |
х |
|
|
Г |
|
|
|
|
|
U |
|
rN |
|
|
K |
|
|
|
rK |
д |
|
|
|
|
|
|
I |
|
|
|
R |
|
|
|
p |
|
p |
|
|
|
|
|
|
|
r |
|
|
|
|
|
U
пит
EN - НЭ; rN - образцовое сопротивление.
Сначала ключ “к” ставится в положение “1”. В цепь,
образованную |
элементами EN , Г, rN |
встречно включается два |
|
напряжения EN |
и I p rN . Реостатом r изменяют ток до тех пор, пока “ |
||
Г“ покажет 0. Это будет, если |
|
||
|
|
EN |
I p rN |
т.е. при |
|
|
|
I p |
EN |
const, т.е. при вполне определенной, постоянной |
|
|
|||
|
rN |
|
|
величине тока.
Затем “ к “ ставят в положение “ 2 “ и, неменяя I p , добиваются нуля гальванометра перемещением движка “ д “ по R p . Тогда
r
Ex EN rk (1)
N
Выражение (1) показывает, что высокая точность обеспечивается, если
64

1) EN , rN и rk - известны с большой степенью точности. Поэтому EN – нэ, rN - образцовое сопротивление, а rk Rp – магазин сопротивления.
2)должен быть точно установлен факт равенства двух напряжений. Поэтому к индикатору нуля ИН предъявляют требования высокой чувствительности, и именно поэтому в роли ИН выступает гальванометр.
Компенсаторы постоянного тока выпускаются нескольких классов точности от 0,005 до 0,2.
Различают компенсаторы малого и большого сопротивления.
Компенсатор постоянного тока |
большого сопротивления |
(большого R p ) имеет сопротивление |
R p =10 кОм, I p =0,1мА, |
предназначен для изменения напряжений порядка 1 в - больших напряжений.
Компенсаторы постоянного тока малого сопротивления имеют I p =10мА с R p =100Ом – предназначены для измерения малых
напряжений.
Пределы измерения 2 .
R p выполняется в виде проволочных реохордов. Но с
течением времени реохорды изнашиваются, поэтому в компенсаторах высоких классов точности реохорды не применяются, а используются различные переключательные схемы.
д |
ж |
p3 |
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
r1 |
r1 |
|
|
|
|
p1 |
p2 |
|
|
|
|
в |
г |
|
|
|
|
|
|
r1 |
r1 |
r |
1 |
|
|
|
|
|
|
|
|
|
Например, |
шунтирующая декада |
p1 , p2 , p3 - рычаги |
p1 и |
p2 |
||
механически скреплены. |
Напряжение |
с r1 подается |
на |
9 |
||
последовательно соединенных резисторов с сопротивлениями такой же величины. Тогда на каждом резисторе второй декады падение напряжения U 2 =0,1 U1 .U k равно суммарному падению напряжения
на участке “ вгдж“.
65
|
Независимо от положения рычагов |
p1 и |
p2 сопротивление |
|||||||
цепи рабочего тока остается неизменным. Шунтирующих декад |
||||||||||
может быть несколько. |
|
|
|
|
|
|
||||
|
|
|
|
|
Двойная декада |
|
|
|
||
|
в |
|
г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Две одинаковые декады включены последовательно. Здесь |
|||||||||
напряжение снимается с участка “ вг“ тогда, как сопротивление |
||||||||||
рабочему току не меняется. |
|
|
|
|
|
|||||
|
В компенсаторы постоянного тока малого сопротивления |
|||||||||
применять трущиеся контакты в главной цепи нельзя, т.к. это может |
||||||||||
привести к значительному изменению сопротивления рабочей цепи, |
||||||||||
а оно невелико. |
|
|
|
|
|
|
|
|||
|
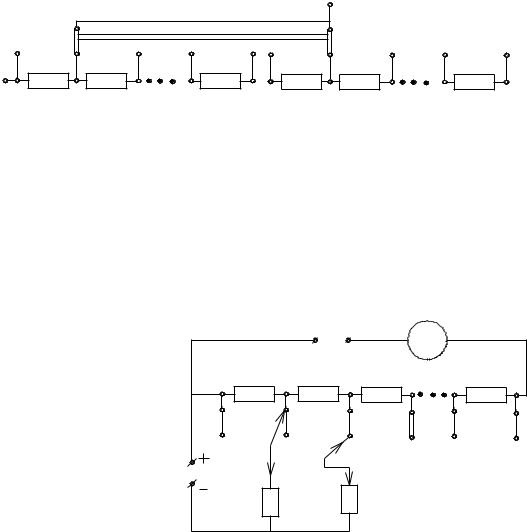
Здесь используются схемы с изменяющейся величиной |
|||||||||
рабочего тока. Например, схема В.С. |
Уманцева. U k |
создается на |
||||||||
постоянных по величине резисторах r , по которым |
|
|||||||||
протекают |
токи |
I1 , I 2 ,...I n . U k |
зависит |
от |
E |
|
Г |
|||
этих |
токов, |
т.е. |
от |
|
|
|
||||
|
|
x |
|
|||||||
|
|
|
|
|||||||
положения |
движков |
на |
r |
|
r |
r |
r |
|||
контактах. |
Если |
n1 и |
n2 - |
|
|
|
|
|
||
номера |
контактов, |
на |
|
д |
|
|
|
|||
которых находятся движки |
|
1 |
|
д |
|
|||||
|
|
|
|
|||||||
|
и д2 , то |
|
|
|
|
I |
|
2 |
|
|
д1 |
|
|
|
|
|
I |
|
|||
|
|
|
U |
1 |
|
|
||||
|
|
U k I1rn1 I 2 rn2 . |
пит |
r1 |
|
2 |
|
|||
|
|
|
|
r2 |
|
|||||
|
и I 2 |
отличаются друг от |
|
|
|
|||||
I1 |
|
|
|
|
||||||
|
|
|
|
|
||||||
друга в 10 раз. |
|
|
|
|
|
|
|
|||
|
|
|
n |
Определяются они резисторами r1 и r2 , т.к. r1 |
и r2 >> ri . Если |
||
|
|
|
1 |
“ Г“ показывает |
0, то EХ |
отсчитывается по положению щеток, |
|
причем каждая щетка дает свой десятичный знак. |
|
||
Требуемый |
рабочий |
ток I1 I 2 ... I n |
устанавливается |
аналогично предыдущему ( EN не изображен, реостат также).
Компенсаторы постоянного тока могут быть использованы для измерения токов и сопротивлений по следующим схемам.
66
R |
обр |
I |
R x |
R |
обр |
|
x |
|
|
||
|
|
|
|
|
|
|
k |
|
Ux |
U |
обр |
"xx" |
|
|
|
||
|
|
|
|
||
k"xx"
I |
|
|
U |
обр |
R |
|
|
U |
x |
R |
|
|
|
|
|
|
|
|
|
||||||
x |
Rобр |
x |
U |
|
|
обр |
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
обр |
|
|||||
Основные источники погрешности: -нестабильность I p
-порог чувствительности НИ.
I |
|
|
U i U k |
; |
U |
|
U |
|
I |
|
r r r |
порог |
|
k |
i |
порог |
|||||||
|
|
ri rr rk |
|
|
|
|
i r k |
||||
|
|
|
|
|
|
|
|
|
|
|
Истинное U k U i
|
U |
|
U |
k |
|
I |
порог |
r |
r |
r |
|
k |
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
U k |
|
|
|
U i |
i |
r |
k |
|
|
|
|
|
|
|
|
|
|||
Компенсаторы переменного тока
Компенсаторы переменного тока так же, как и компенсаторы постоянного тока производят измерение напряжения путем его сравнения с известным, но уравновешивать нужно не только модуль напряжения, но и его форму. Уравновешивание основано на том принципе, что ток на участке цепи отсутствует, если к нему приложены равные по величине и противоположные по фазе напряжения.
На переменном токе отсутствует эталонный источник, аналогичный нормальному элементу, поэтому компенсаторы переменного тока менее точны, чем компенсаторы постоянного тока: рабочий ток в них приходится устанавливать по амперметру.
Компенсаторы переменного тока бывают двух типов:
1)Компенсаторы, снабженные фазорегулятором и измеряющие напряжение в полярной системе координат – полярно - координатные компенсаторы.
2)Компенсаторы, имеющие две рабочие цепи, напряжения которых сдвинуты на 900. Они измеряют составляющие вектора
67
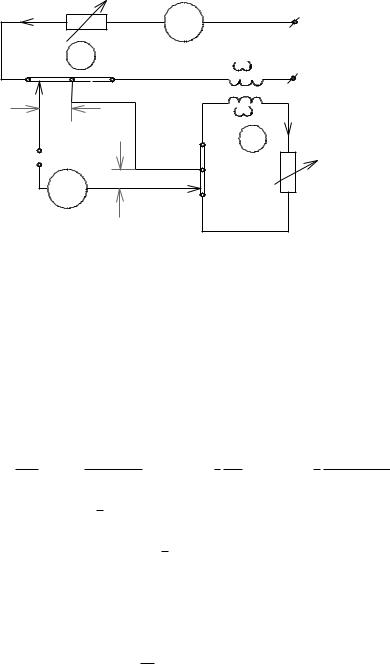
напряжения и называются прямоугольно – координатными |
|||||||||||||||||||||||||||
компенсаторами переменного тока. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
а |
|
1 |
б |
|
|
|
|
|
|
|
|
|
|
|
|
U ~ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д1 |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
Тв |
|
|
|
|
|
|
|
|
|
|
|
UKX |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
I |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
U i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
UKY |
|
|
|
|
|
|
|
|
|
O' |
r |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ИР |
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
д2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Тв. – воздушный трансформатор. |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
аб, вг – реохорды. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
I1 устанавливается по амперметру определенной величины. |
|||||||||||||||||||||||||||
Ток I1 создает падение напряжения, |
|
на проволоке аб U аб , |
которое |
||||||||||||||||||||||||
совпадает |
по |
|
фазе |
|
с |
I1 , т.к. |
|
|
сопротивление |
контура |
1 |
||||||||||||||||
преимущественно активное. Т.к. |
|
I1 const , |
|
то |
rаб |
может |
быть |
||||||||||||||||||||
отградуирован в единицах U аб . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Во вторичной обмотке Тв наводится эдс e 2 |
|
|
|
|
|
|
|
||||||||||||||||||||
e |
|
d |
d 0 HS |
|
|
|
S |
1 di1 |
|
S |
1 dI1m sin t |
|
|
||||||||||||||
2 |
|
|
2 dt |
|
2 |
dt |
|
|
|
|
|
|
2 |
|
2 |
|
l dt |
|
2 |
0 |
|
l |
dt |
|
|
|
|
|
|
|
|
2 0 S |
1 I1m cos t MI1m cos t . |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
0 |
S 1 |
M |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l - длина магнитной силовой линии. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Т.е. между e2 и I1 |
сдвиг по фазе 900. Эта эдс создает в контуре |
||||||||||||||||||||||||||
2 ток I 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I 2 |
l2 |
|
I1m cos t (1) |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
r2 |
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
М – взаимная индуктивность между первичной и вторичной |
|||||||||||||||||||||||||||
обмотками Тв. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
r2 - сопротивление контура 2, носит активный характер. |
|
|
|||||||||||||||||||||||||
Ток |
I 2 совпадает по фазе с |
|
l2 . |
I 2 |
создает на “ |
вг“ |
падение |
||||||||||||||||||||
напряжения U вг , которое совпадает по фазе с I 2 . Следовательно, (1) |
|||||||||||||||||||||||||||
показывает, |
что |
если |
|
I1 const , |
|
то |
|
I 2 const |
автоматически, |
и |
|||||||||||||||||
амперметр |
в |
контур |
2 |
не |
ставится. |
|
Для |
|
регулировки |
I 2 |
при |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
68 |
изменении |
ставится сопротивление |
rf . Реохорд “ |
|
|
|
в |
|
|
|||||||||||||||||||||
вг“ |
в |
единицах |
напряжения |
может |
|
|
|
быть |
|
|
|
U |
|||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
отградуирован. Таким образом сдвиг по фазе между |
|
|
|
|
|
|
|||||||||||||||||||||||
|
и |
|
|
|
90 |
0 |
. |
Центры д1 |
|
Ukx |
|
|
|
|
|
|
|||||||||||||
U аб |
U вг составляет |
|
|
|
|
|
|
|
|
||||||||||||||||||||
реохордов, |
точки O и О |
электрически |
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
д |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
соединены между собой. |
U аб и |
U вг |
создают |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
электрическую |
прямоугольную |
|
систему |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uky |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
координат. |
Главная |
цепь |
|
конденсатора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
U |
|
|
|
|
|
|
||||||||||||||||||||||
содержит U i , ИР. |
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
||||||||||
|
Производят перемещение движков д1 и д2 |
до тех пор, пока ИР |
|||||||||||||||||||||||||||
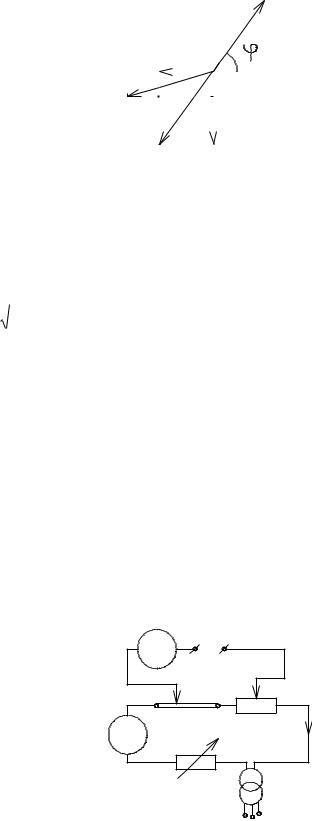
покажет 0, тем самым получают на “ аб“ и “ вг“ составляющие вектора напряжения, равного по модулю измеряемому, а по фазе сдвинутого на 1800 – составляющие вектора компенсирующего
напряжения U k - U kx |
и U ky |
|
|
|
|
||||
|
|
|
|
|
|
|
; tg |
U ky |
. |
|
|
U x |
|
U kx2 |
U ky2 |
||||
|
|
|
|||||||
|
|
|
|
||||||
|
|
|
|
|
|
|
U kx |
||
Погрешность |
компенсатора |
в значительной степени |
|||||||
определяется относительной погрешностью установки рабочего тока по амперметру и в лучшем случае составляет 0,1%.
U k и U i должны быть одинаковой частоты. Если U k – чистая синусоида, а U i содержит еще и высшие гармоники, то
уравновешивается только 1ая гармоника, т.е. в общем случае полной компенсации получить нельзя.
ИР – резонансный гальванометр.
Полярно-координатный компенсатор
При измерении в полярной системе координат модуль U i определяют по положению движков д1 и д2 на шкале калиброванной
проволоки “ аб“ и магазине “ бв“. I p |
устанавливают по амперметру, |
|||
а фаза регулируется фазорегулятором |
Ф. |
|
|
|
Регулируя модуль U k движками д1 и |
д2 , |
ИР |
U |
|
|
|
|||
и, изменяя фазу поворотом ротора Ф., |
|
i |
|
|
д1 |
|
д |
||
|
|
|
2 |
|
добиваются отсутствия отклонения ИР. |
|
|
||
Тогда U i U k , а x k , U k определяется |
а |
б |
в |
|
по положению движков д1 и д2 , а k |
– по |
A |
|
|
|
|
|
||
положению ротора фазорегулятора. |
|
|
|
Ф |
|
|
|
|
|
~
I
p
69
|
|
|
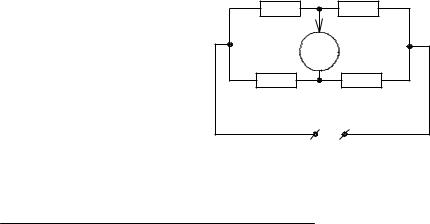
Мосты постоянного тока |
|
|
|
|
|
||||||
|
В мостах применяется мостовая ИСС, под |
r1 |
|
|
r2 |
|||||||||
которой понимается четырехполюсник, к |
|
в |
||||||||||||
двум |
входным |
зажимам |
которого |
(аб) |
|
|
|
IГ |
|
|
||||
присоединяется |
источник |
питания, |
к |
|
|
|
|
|
||||||
а |
|
|
|
|
|
|||||||||
двум |
выходным |
вг |
– |
индикатор |
r3 |
Г |
r |
б |
||||||
|
||||||||||||||
|
|
|
4 |
|||||||||||
равновесия – |
гальванометр “ Г“. |
аб |
|
|
|
г |
|
|
||||||
входная |
диагональ, |
вг |
- |
нагрузочная. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||||||
r1 , r2 , r3 , r4 |
- плечи моста. |
|
|
|
|
|
|
|
|
|
||||
На основании теоремы о эквивалентном |
|
|
|
U |
|
|
||||||||
|
|
|
|
|
|
|||||||||
генераторе |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
I Г U |
|
|
|
r1r4 r2 r3 |
|
|
|
(1) |
|
|
||
|
|
r1r2 r3 r4 r3 r4 r1 r2 |
rГ r1 r2 r3 r4 |
|
|
|||||||||
|
|
|
|
|
|
|||||||||
|
Мост в равновесии, если I Г 0 , т.е, если |
|
|
|
|
|
||||||||
|
|
|
|
|
|
r1r4 r2 r3 0 |
|
|
|
|
|
|
||
отсюда равновесие моста |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
(2) |
– |
произведение |
сопротивлений |
|
r1r4 r2 r3 |
|
||||
противоположных плеч моста равны между собой. |
|
|||||
|
Выражение (2) показывает, как с помощью моста измерять |
|||||
сопротивления: если |
в |
плечо |
r1 поставить |
неизвестное |
||
сопротивление rx , а в остальные плечи магазины сопротивлений, и уравновесить мост, то на основе (2) получим:
|
|
r |
|
r2 |
r |
|
(3) |
||
|
|
|
|
||||||
|
|
x |
|
r4 |
3 |
|
|||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
r3 |
|
|
|
|
R3 |
10n |
|||
- плечи отношений. Обычно |
|||||||||
|
|
||||||||
r4 |
|
|
|
|
|
|
r4 |
||
n – целое число от –5 до +5. r2 - плечо уравновешивания.
(3)показывает, что неизвестное сопротивление rx
определяется путем его сравнения с известными. Точность работы моста обеспечивается, если:
1) r1 , r2 , r3 , r4 известны с большой степенью точности. Поетому в качестве r2 , r3 , r4 выбраны магазины сопротивлений.
2)Точно установлен факт равновесия моста. Поэтому к индикатору равновесия предъявляется требование высокой чувствительности. В качестве индикатора равновесия используется магнитоэлектрический гальванометр.
Для моста характерна высокая чувствительность
70