

Корганова, лекции
.pdfS |
|
lim |
I Г |
|
dI Г |
||
MI |
r |
dr |
|||||
|
r1 |
0 |
|
||||
|
|
|
|||||
|
|
|
|
1 |
1 |
||
При наличии гальванометра, чувствительность
S |
|
|
d |
|
d |
|
dI Г |
S |
|
S |
|
|
M |
|
|
|
MI |
Г |
|||||||
|
|
dr1 |
|
dI |
Г dr1 |
|
||||||
|
|
|
|
|
|
|
||||||
S Г чувствительность гальванометра.
Еще пользуются выражением
S M d dr1 r1
Рассмотрим режим вблизи точки равновесия, который характеризуется выполнением двух условий:
1) предварительно мост был уравновешан
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1r4 r2 r3 |
и I Г 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2) плечо r1 получило приращение r1 |
r1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
Тогда в соотвестии с (1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
I Г |
U |
|
|
|
|
|
|
|
|
|
|
r1 r4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
r1r2 |
r3 r4 |
r3 r4 r1 r2 rГ r1 r2 r3 r4 |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
т.е. вблизи точки равновесия |
|
|
I Г пропорционально |
|
|
r1 и |
||||||||||||||||||||||||||||||
выражения для чувствительности примут вид: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
S |
|
|
|
|
I Г |
; |
S |
|
|
|
; |
|
S |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
MI |
|
r |
M |
r |
|
M |
|
r1 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Представляют интерес оптимальные параметры, при которых |
||||||||||||||||||||||||||||||||||||
чувствительность наибольшая. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Для ЭМ гальванометра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
p k I Г |
|
rГ |
|
|
|
|
|
|
|
|
|
|
|
||||||||
p мощность, потребляемая гальванометром. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
k I Г |
|
|
|
|
|
|
|
|
|
|
|
|
kU r1 r4 |
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
S |
|
|
|
rГ |
|
|
|
|
|
|
|
|
|
|
|
|
rГ |
|
|
|
|
|
|
|
; |
|||||||||||
M |
|
r1 |
|
|
|
r r r r r r r r r r r r r r |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
1 1 2 3 |
|
4 |
|
3 4 1 |
2 |
|
|
|
|
Г 1 |
|
2 3 |
|
4 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Это выражение можно исследовать на экстремум для каждого |
||||||||||||||||||||||||||||||||||||
коекретного |
случая. |
|
|
В |
|
частности, |
если |
мост |
|
равноплечий, т.е. |
||||||||||||||||||||||||||
r1 r2 r3 |
r4 |
r , |
то максимум чувствительности будет иметь место |
|||||||||||||||||||||||||||||||||
при rГ r
Приборы, построенные по схеме рисунка 1, называются одинарными мостами, они выпускаются двух типов в соответствии с тем, как осуществляется процесс уравновешивания; либо
изменением отношения |
r3 |
при неизменном r – линейные мосты, |
|
||
|
r4 |
2 |
|
|
71

либо изменением r |
при постоянном отношении |
r3 |
магазинные |
||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
r4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мосты. |
|
|
|
|
|
|
|
|
|
|
|
|
|
rх |
|
|
0,1 |
|
1 |
10 |
100 |
1000 |
|
|
|
|
|
к2 |
|
|
|
|
|
к1 |
|
|
|
|
|
|
|
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
r3 |
|
|
|
|
r4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Реохорд |
|
|
|
|
|
|
|
|
|
|
|||
к1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
линейный мост |
||
rх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к2 |
|
9,1 Ом |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
9,10 Ом |
|
|
|
|
|
|
|
|
|
|
|
Г |
|
9,100 Ом |
|
|
|
|
|
|
|
|
|
|
|
|
|
9,1000 Ом |
|
|
|
|
|
1/100 |
|
1/10 |
|
1 |
10/1 |
100/1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
к1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
магазинный мост |
|
||
Для измерения малых сопротивлений(<10 Ом) сопротивления |
|||||||||||||
соединительных |
|
проводов |
|
будут |
вносить |
значительную |
|||||||
погрешность. Для этих целей используются двойные мосты (мост |
|||||||||||||
Томсона). |
|
|
|
|
|
|
|
|
|
|
|
|
|
Здесь r – сопротивление соединительного |
r2 |
|
r3 |
|
|||||||||
провода. |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если мост в равновесии, то |
|
|
|
|
|
||||||||
I |
|
r I |
r I |
r 0 |
|
|
|
r1 |
Г |
r4 |
I |
||
x |
|
|
|
|
2 |
||||||||
|
|
x |
1 1 |
|
2 2 |
|
|
|
|
|
|
|
|
I x rN I1r4 I2r3 0 |
|
I |
|
|
|
|
I |
||||||
|
2 |
I |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
I x I1 r I1 r1 r4 0 |
Iх |
r 1 |
|
r |
|
r1N |
|||||||
Отсюда можно получить |
I |
Iх- I1 |
|
|
|
||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
72 |
|
r |
|
rr |
r |
|
r |
|
|
|
2 |
|
4 |
|
2 |
|
1 |
|
rx rN r |
r r r |
|
r |
|||||
r |
|
|||||||
3 |
1 4 |
|
3 |
4 |
|
|||
Если механически связать рукоятки сопротивлений r2 и r1 , а также r3 и r4 с тем, чтобы изменение r2 r3 , необходимое для
уравновешивания моста (первое слагаемое), сопровождалось равным изменением сопротивления r1 (соответственно r4 ) и чтобы всегда
соблюдалось равенство |
r2 |
|
r1 |
, то дополнительное слагаемое |
|
r3 |
r4 |
||||
|
|
|
обратитя в ноль. И это исключит погрешность от сопротивления “ r “. Предел измерения до 10-6Ом.
Часто мосты выполняются так, что не требуется производить операции уравновешивания. Измеряемая величина отчитывается по показанию гальванометра. Например, при многократных измерениях степени отклонения измеряемого сопротивления от заданной величины. Тогда заранее мост уравновешивается на заданную величину, а затем по показаниям гальванометра судят о степени отклонения. Шкале “ Г“ градуируется в % от номинального значения. И мосты называются процентными.
Класс точности 0,005; 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1,0; 2,0; 5,0.
|
|
|
|
|
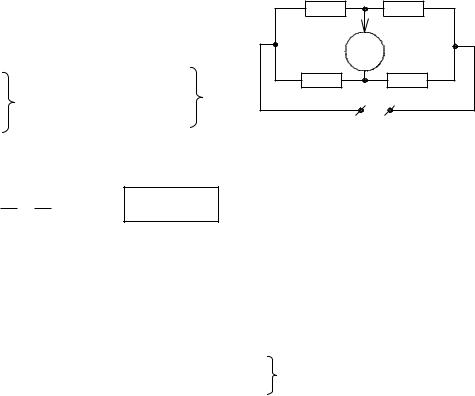
Мосты переменного тока |
|
|
||||||||||||
z1 , z2 , z3 , z4 комплексные сопротивления. |
|
|
|
Z1 |
в |
Z2 |
|||||||||||||
Если |
ИР |
показывает |
0, то |
|
потенциал |
|
|
|
|
|
IГ |
|
|||||||
точки “ в“ равен потенциалу точки “ г“, |
|
|
|
|
|
|
|||||||||||||
|
|
а |
|
ИР |
б |
||||||||||||||
а это значит, что |
|
|
|
|
|
|
|
|
|
|
Z3 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
Z4 |
||||||||
I |
z I |
z |
3 |
|
I |
I |
|
|
|
|
|
|
|
|
|
|
|||
1 |
1 |
3 |
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
г |
|
|
I2 z2 I4 z4 |
|
I3 |
I4 |
|
|
|
|
|
|
|
|
|
|||||||
(1) и |
|
(2) |
|
|
|
|
|
|
~ U |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разделим (1) друг на друга с учетом (2) |
|
|
|
||||||||||||||
|
|
|
|
z1 |
z3 |
z1 z4 |
z2 z3 |
|
|
|
|
(3), т.е. |
для |
равновесия |
|||||
|
|
|
|
z2 |
z4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мостов переменного тока произведения комплексных сопротивлений |
|||||||||||||||||||
противоположных плеч моста должны быть равны. (3) можно |
|||||||||||||||||||
записать так |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
z e j 1 z |
e j 4 |
z |
|
e j 2 z |
e j 3 |
|
|
||||||
|
|
|
|
|
|
|
1 |
|
|
4 |
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
z z |
e j 1 4 |
z |
|
z |
e j 2 3 |
|
|
|||||
|
|
|
|
|
|
|
|
1 |
4 |
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
|
z1 z4 |
z2 z3 |
|
|
|
|
|
(4) |
|
|
|
|||
|
|
|
|
|
|
1 4 2 3 |
|
|
|
(5) |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
73 |
Т.е. для равновесия мостов переменного тока должно выполняться два условия: произведения модулей противоположных плеч должны быть равны, и суммы аргументов противоположный плеч должны быть равны.
Если (3) представить следующим образом |
|
|
r1 |
jx1 r4 jx4 r2 jx2 r3 jx3 |
|
r1r4 x1 x4 j x1r4 r1 x4 r2 r3 x2 x3 j r3 x2 x3r2 , то |
||
|
r1r4 x1 x4 r2 r3 x2 x3 |
|
|
x1r4 r1 x4 r3 x2 x3r2 |
(6) |
Выражения (4), |
(5) и (6) показывают, |
что не при любых |
сопротивлениях можно уравновесить мост. И возникает вопрос о сходимости мостов переменного тока. Под сходимостью мостов переменного тока понимают их способность достигать положения равновесия.
Выражения (4), (5), (6) показывают также, что в общем случае равновесие моста может быть достигнуто лишь на одной частоте.
Однако, если выполнить условие, например, x4 x3 0, то (6) примет вид
r1r4 |
r2 r3 |
|
x1r4 |
x2 r4 |
т.е. равновесие моста может быть достигнуто при |
любой частоте. |
|
|
Взависимости от того, зависят или не зависят условия равновесия моста от частоты, мосты переменного тока делятся на частотозависимые и частотонезависиые.
Вчастотозависимых мостах при искажении формы кривой напряжения U, равновесие может быть достигнуто только для основной волны.
Чувствительность мостов переменного тока оценивается по отношению к напряжению, если роль ИР выполняет электронный вольтметр.
|
|
|
z1 |
|
|
|
|
z3 |
|
|
|
|
z1 z4 z2 z3 |
|
|
||||
U вг |
U |
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
z |
|
z |
|
z |
|
z |
z |
|
z |
|
z |
|
|
|||||
|
z |
2 |
|
3 |
|
|
|
2 |
3 |
4 |
|||||||||
|
|
1 |
|
|
|
|
4 |
|
1 |
|
|
|
|
||||||
Врежиме вблизи точки равновесия, т.е. когда
1)z1 z4 z2 z3
2)z1 z1 , будем иметь
U U z1 z4
вг z1 z2 z3 z4
74

Чувствительность моста S |
МИ |
|
|
U |
|
|
|
|
|
|
|
|
U вг |
|
z1 z4 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
z1 |
|
|
z z |
2 |
z |
3 |
z |
4 |
|
|
|
|
|
z1 |
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Исследование проведенного |
выражения |
на |
|
экстремум |
||||||||
чувствительности, показало, что max имеет место, когда мост симметричен, т.е. z1 z2 и z3 z4 и фазовый угол плеч,
расположенных по обе стороны от индикатора равновесия, равен, т.е. плечи составлены из индуктивности и емкости. Но из-за наличия потерь точно выполнить это условие невозможно.
Мосты переменного тока применяются для измерения R, L, C, M и частоты.
Приборы с автоматическим уравновешиванием
Приборы, в которых некоторые операции процесса измерения (например, уравновешивание) автоматизированы, называются автоматическими.
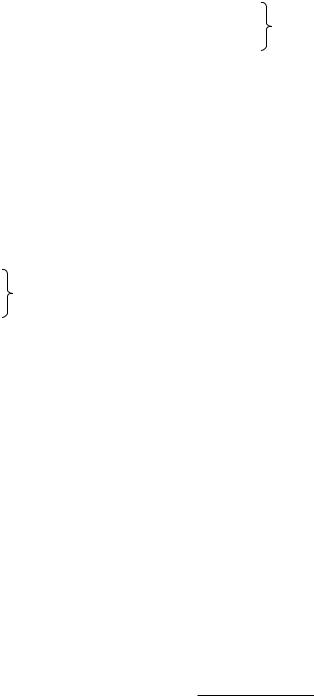
Процесс уравновешивания может осуществляться непрерывно (следящее уравновешивание). Приборы следящего уравновешивания разделяются на приборы со статической характеристикой (без интегрирующих звеньев) и с астатической характеристикой (с интегрирующим звеном).
x |
|
x |
|
||
У |
|||||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОП |
|
|
|
|
|
|
|
y |
|
y |
|
α |
|
РП |
|
ИЦ |
ИМ |
РУ |
|||||
|
|
|
|
xk
а) структура прибора статического типа.
x |
|
x |
|
U у |
|
д |
|
p |
|
l |
|
У |
Д |
Ред. |
МП |
РУ |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
xk
x
ОПк
б) структура прибора астатического типа.
Выходной величиной замкнутой части схемы (а) является напряжение или ток, который измеряют и регистрируются регистрирующим прибором прямого преобразования.
75

Выходной величиной замкнутой части схемы (б) является угол поворота двигателя д , или редуктора р . В звено РУ обычно входит
линейно перемещающаяся каретка, на которой укреплены стрелка и регистрирующий орган. Вращение выходного вала редуктора преобразуется в линейное перемещение каретки специальной механической передачей МП. “ОП“ предназначен для того, чтобы создать компенсирующую величину “ xк “, однородную с “ x “, для сравнения с последней.
Автоматические приборы следящего уравновешивания со статической характеристикой
В зависимости от рода измеряемой величины аналоговые измерительные приборы со статической характеристикой делятся на:
1)компенсационные приборы для измерения малых токов и напряжений (компенсационные милливольтметры и миллиамперметры);
2)автоматические мосты;
3)компенсаторы моментов.
Основные соотношения для таких приборов можно получить, рассматривая автокомпенсаторы напряжения (компенсационные милливольтметры).
Они представляют собой усилители, охваченные глубокой отрицательной связью, с выходными приборами. Строится по следующим блок-схемам.
Ex, rx |
UВХ |
mv |
|
Uk |
rВХ |
||
|
|||
rk |
|
|
|
|
rд |
|
|
с выходом по напряжению |
|
||
76
Ex, rx |
UВХ |
mA |
rk |
rВХ |
|
|
Uk |
IВЫХ |
|
|
rд |
с выходом по току
На выходе может стоять регистрирующий прибор.
Для схемы (1) в измерительной схеме сравнения Ex и U k направлены встречно и
|
|
|
|
|
|
|
|
|
Uвх |
|
|
Ex U k |
|
|
rвх k1 |
Ex U k (1) |
|||||
|
|
|
|
|
|
|
|
|
rx |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rk rвх |
|
|||||
где k1 |
|
|
|
rвх |
|
|
коэффициент преобразования ИСС, обычно |
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||
|
|
rk |
rвх rx |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
rвх rx rk |
и k1 1 |
|
|||||||
|
|
|
|
|
U вых |
|
|
k |
|
коэффициент усиления усилителя. |
|||||||||||
|
|
|
|
|
U вх |
|
|
2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uвых k2 Uвх |
(2) |
||||
|
|
|
|
|
|
|
|
|
|
U k |
U |
|
rk |
|
k3Uвых |
(3) |
|||||
|
|
|
|
|
|
|
|
|
|
вых |
r r |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
д |
|
||
|
|
k |
|
|
U k |
|
|
|
rk |
|
|
коэффициент преобразования цепи ОП. |
|||||||||
|
|
3 |
|
|
|
|
|
||||||||||||||
|
|
|
Uвых |
|
|
|
rk |
rд |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Решая совместно (1) и (3), получаем
|
U вых |
|
|
k1k2 |
|
Ex |
|
|
|
|
|
|
|
|
|
k1k2 k3 |
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
(4) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
Имея в виду, что выходной величиной является угол поворота |
|||||||||||||
выходного прибора , получим |
|
|
|
|
|
||||||||
|
|
Sвых U |
вых Sвых |
k1k2 |
|
|
Ex Sk Ex |
(5) |
|||||
|
|
1 k k |
k |
3 |
|||||||||
|
|
|
|
|
1 |
2 |
|
|
|
||||
Sвых чувствительность выходного прибора,
Sk чувствительность компенсаторного прибора.
77

Sk Sвых |
k1k2 |
|
|
|
1 k k |
k |
3 |
||
1 |
2 |
|
||
При рассмотрении метрологических свойств компенсаторных приборов удобно пользоваться коэффициентом статизма.
k |
|
|
Ex U k |
1 |
U k |
1 |
k1k2 k3 |
|
1 |
|
1 |
c |
|
|
|
|
|
||||||
|
|
Ex |
|
Ex |
|
1 k1k2 k3 |
1 k1k2 k3 |
|
k1k2 k3 |
||
|
|
|
|
|
|
||||||
Введем kc в уравнение шкалы
Sвых kc k1k2 Ex
Рассмотрим влияние различных факторов на статическую погрешность прибора.
Будем искать погрешность в виде
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dU |
вых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U вых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Дифференцируя (4), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
dU |
|
|
|
|
Uвых |
dk |
|
Uвых |
dk |
|
|
Uвых dk |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
вых |
|
|
|
|
|
k1 |
|
1 |
|
|
|
k2 |
|
|
|
2 |
|
|
|
|
k3 |
|
3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
k2 dk1 |
|
|
|
|
|
|
|
|
k1dk2 |
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k1 |
k2 |
|
|
|
|
dk3 |
Ex |
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
2 |
|
|
1 k1k |
|
|
|
|
2 |
|
|
|
|
||||||||||||||||
|
|
|
1 k1k2 k3 |
|
|
|
|
|
k1k2 k3 |
|
|
|
2 k3 |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
dk1 |
|
|
dk |
2 |
|
|
|
|
|
1 |
|
|
|
|
dk3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dk3 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dk1 |
|
dk2 |
|
|
(3) |
|||||||||||||||||||||
|
k1 |
|
|
k2 |
|
|
|
1 k1k |
|
|
|
|
k3 |
|
|
|
|
|
|
|
k |
|
kc |
k3 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 k3 |
|
|
|
|
|
k1 |
|
|
|
|
2 |
|
|
|
|
|||||||||||||||||
Выражение (5) показывает, что нестабильность коэффициентов преобразования звеньев канала прямого преобразования, влияет на погрешность компенсационных приборов в “ kc “ раз меньше, чем у приборов прямого преобразования. А
нестабильность коэффициента преобразования звеньев канала обратного преобразования определяет погрешность всего прибора в целом. kc в зависимости от требуемой точности выбирают равным
0,02 0,002, а k3 по возможности стараются стабилизировать. Например, в данной схеме
dk3 rд drk rk drд , |
|
k3 |
rд rk rk |
т.е. погрешность будет иметь минимальное значение, когда drд drk ,
rд rk
78
т. е. когда температурные коэффициенты сопротивления резисторов rд и rk равны.
Пределом уменьшения kc является потеря устойчивости системы, т. к. при этом увеличивается k1 k2 .
Относительная погрешность от дрейфа нуля и порогов чувствительности звеньев, как следует из выражения (5), не зависти от глубины отрицательной обратной связи, а определяется только коэффициентом передач звеньев, находящихся в прямой цепи перед звеном - источником помех. Т.е. компенсационные приборы в отношении помех в виде дрейфа нуля и пороговой чувствительности звеньев не имеют преимуществ по сравнению с приборами прямого преобразования.
Результирующая погрешность прибора при наличии самописца на выходе
|
|
|
др п.ч. сп |
||
др - погрешность от дрейфа нуля, |
|
||||
п.ч. - погрешность от порога чувствительности, |
|||||
сп - погрешность выходного самописца. |
|||||
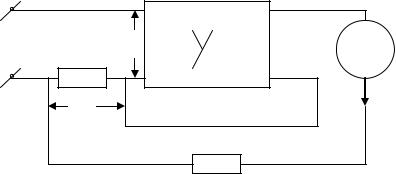
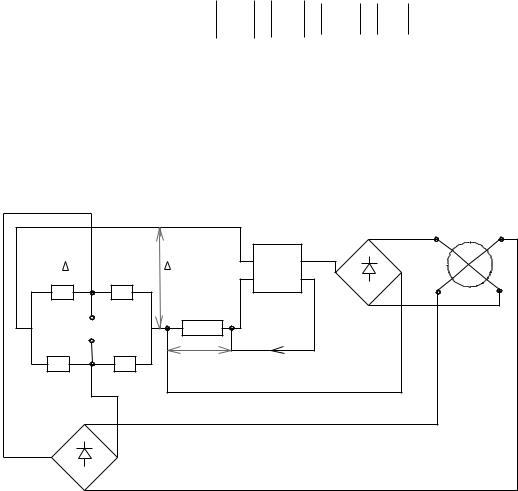
Автоматические мосты статического типа |
|||||
|
|
|
|
|
ИП |
r + |
r |
r |
U |
У |
~ |
t |
t |
М |
|
||
|
~Uп |
|
rk |
|
|
r |
r |
|
|
|
|
|
|
|
|
||
|
|
|
U |
|
I |
|
|
|
K |
|
k |
79

Автоматические мосты бывают уравновешанные и неуравновешанные.
Представлена схема неуравновешанного моста, работающего в
комплекте с термометром |
|
сопротивления |
|
rt |
(rt r) . выходной |
||||||||||||
измерительный прибор ИП – логометр. |
|
|
|
|
|
||||||||||||
U м компенсируется U k |
(некомпенсацией пренебрегаем) |
||||||||||||||||
U |
|
U |
|
U |
|
rt |
; |
U |
|
I r |
|||||||
м |
k |
n |
|
|
|
||||||||||||
|
|
|
|
|
2r |
|
|
|
k |
|
|
k k |
|||||
|
|
|
|
|
|
отсюда |
|
|
|
|
|
||||||
|
|
|
|
I |
|
U |
|
|
t rt tx |
kU |
|
t |
|
||||
|
|
|
|
k |
n |
|
2r rk |
n |
x |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t температурный коэффициент сопротивления материала
термометра сопротивления. tx измеряемая температура.
U n напряжение питания моста.
Таким образом Ik f (Un ) , что требует либо стабилизации напряжения питания U n , либо применения логометра в качестве выходного измерителя.
Гальванометры
Гальванометры – это высокочувствительные приборы, служащие для измерения весьма малых токов и напряжений, если известна постоянная гальванометра, и в качестве индикатора нуля. У современных гальванометров постоянная имеет величину,
|
достигающую 10 11ам мм |
- для зеркальных и |
10 8 10 9ам мм |
- для |
||||||||||||||||||
|
переносных. Гальванометр обычно имеет не градуированную шкалу. |
|||||||||||||||||||||
|
|
Наибольшее распространение имеют гальванометры с подвижной |
||||||||||||||||||||
|
рамкой, которая крепится с помощью подвесов (а) или растяжек (б). |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В случае (а) ток подводится с |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
помощью |
без |
моментных |
||
|
|
|
|
|
3 |
|
|
|
|
|
3 |
пружин, |
а |
в |
случае (б) с |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
помощью |
растяжек. |
При |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
малых токах отклонение под- |
||||
N |
|
|
|
|
|
|
|
S |
N |
|
|
|
|
|
|
S |
вижной части |
мало |
(3 5 ) , |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поэтому |
оно |
отсчитывается |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
не |
при |
помощи |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
а) |
|
|
|
б) |
стрелки, |
а |
|
с помощью |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
светового луча падающего на |
||||
|
зеркальце «З», укрепленное на подвижной части, и отражающегося |
|||||||||||||||||||||
|
от него на шкалу. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
80