

Оценка качества регулирования
Качество любой системы регулирования определяется величиной ошибки:
x(t)=g(t)−y(t)=Φx(p)g(t)
Но функцию ошибки x(t) для любого момента времени трудно определить, поскольку она описывается с помощью ДУ системы – Φx(p) – высокого порядка, и зависит от большого количества параметров системы. Поэтому оценивают качество САР по некоторым ее свойствам, определяют которые с помощью критериев качества.
Критериев качества регулирования много. Их разделяют на 4 группы:
Критерии точности – используют величину ошибки в различных типовых режимах.
Критерии величины запаса устойчивости – оценивают удаленность САР от границы устойчивости.
Критерии быстродействия – оценивают быстроту реагирования САР на появление задающего и возмущающего воздействий.
Интегральные критерии – оценивают обобщенные свойства САР: точность, запас устойчивости, быстродействие.
Существует два основных подхода к оценке качества:
Первый использует информацию о временных параметрах системы: h(t), w(t); расположение полюсов и нулей ПФ замкнутой системыΦ(s).
Второй использует информацию о некоторых частотных свойствах системы: полоса пропускания; относительная высота резонансного пика; и т.д.
Точность в типовых режимах
Рабочие файлы: [ok_ast.vsm]
Для оценки точности используется величина ошибки в различных типовых режимах. Типовые режимы движения состоят в подаче на вход сигналов с нормированными метрологическими характеристиками. Различают типовые режимы:
Ненулевое, неподвижное состояние.
Движение с постоянной скоростью.
Движение с постоянным ускорением.
Движение по гармоническому закону.
Сигналы задания для типовых режимов движения, их модели и изображения по Карсону-Хевисайду
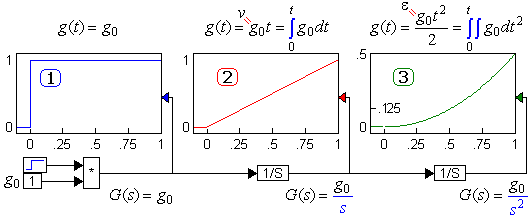
На рис. показаны режимы: ненулевого, неподвижного положения координаты; движение с постоянной скоростью; движение с постоянным ускорением. Легко понять, что перемещение координаты с постоянной скоростью легко получить интегрированием постоянного сигнала, а для получения координаты движущейся с постоянным ускорением необходимо интегрировать координату, перемещающуюся с постоянной скоростью. Заменив операцию интегрирования оператором, получим изображения по Карсону-Хевисайду.
Ошибки статической системы
Здесь и далее будем рассматривать установившиеся составляющие ошибки системы в типовых режимах движения. Для чего будем анализировать уравнение ошибки:
 ,
,
где: g0+v/s+ε/s2 – изображение представленного рядом Тейлора входного сигнала; s→0 соответствует установившемуся режиму.
Итак, если ПФ САР W(s) статическая, т.е. в области низких частот W(s)|s→0→K. Тогда первая составляющая ошибки:
 ,
,
т.е. в статической системе ошибка, вызванная заданием равным константе, так же константа, но меньшая в 1+K раз, а ошибки от заданий меняющихся с постоянными скоростью или ускорением нарастают до бесконечности.
Ошибки системы с астатизмом первого порядка
Если ПФ САР W(s) обладает астатизмом первого порядка, т.е. в области низких частот W(s)|s→0→Kv/s. Тогда первая составляющая ошибки:
 ,
,
т.е. в астатической системе первого порядка ошибка от задания равного константе равна нулю, ошибка от задания меняющегося с постоянной скоростью равна xv=v/Kv, а ошибка от задания, меняющегося с постоянным ускорением, нарастает до бесконечности.
Ошибки системы с астатизмом второго порядка
Если ПФ САР W(s) обладает астатизмом второго порядка, т.е. в области низких частот W(s)|s→0→Kε/s2. Тогда первая составляющая ошибки:
 ,
,
т.е. в астатической системе второго порядка ошибки от заданий равного константе и изменяющегося с постоянной скоростью равны нулю, а ошибка от задания меняющегося с постоянным ускорением равна константе xε=ε/Kε.
Качество САР с астатизмом принято характеризовать величинами, называемыми добротностью по скорости и ускорению:
![]() .
.
О компенсации помех в астатических системах
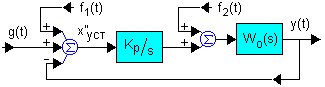
Рассмотрим вторую составляющую ошибки x''уст от возмущающих воздействий fk0. Если САР астатическая, то W(s)|s→0→∞, но возможен случай, когда Wfk(s)|s→0→∞. Т.е. при любой степени астатизма САР x''уст может быть отличной от нуля.
 .
.
Резюме:
Для подавления ошибки от возмущения необходимо, чтобы интегрирующий элемент был включен в контур до места приложения возмущения.
Если рассматривать ошибку чувствительного элемента (сумматора) как возмущение, то, очевидно, что повышение степени астатизма не позволяет устранить ее.
Ошибка при движении по гармоническому закону g(t)=Gmsin(ωкt)
Рассмотрим только первую составляющую ошибки:
x'уст=g(t)/[1+W(s)]=Xmsin(ωкt+φ)
где: g(t) – синусоида; [1+W(s)] – комплексное число.
Следовательно:
(1)
Xm=Gm/|1+W(jωк)|≈Gm/A(ωк).
Резюме:
Формула (1) позволяет идентифицировать положение неизвестной ЛАЧХ на данной частоте по амплитуде ошибки или сформулировать требования к ЛАЧХ при синтезе системы.
Особые точки ЛАЧХ определены комплексными сопряженными корнями. Поведение системы при данных частотах (ωк=|jβк|) требует дополнительного исследования.
Особенность движения системы при гармоническом сигнале задания – это смена знака координат, которое во многих системах может сопровождаться нелинейными искажениями типа "ступенька" или сменой направления сил сухого трения.