

1.2. Дифференциальные уравнения движения свободной и несвободной мт
Используя основной закон динамики и формулы для ускорения МТ при различных способах задания движения, можно получить дифференциальные уравнения движения как свободной, так и несвободной МТ с той лишь разницей, что для несвободной МТ ко всем приложенным к МТ активным (заданным) силам надо добавить на основании аксиомы связей – принципа освобождаемости (Ч. 2 Статика) силы пассивные (реакции связи), а в некоторых случаях и уравнения наложенных на МТ связей.
Так как система сил, приложенных к МТ, является сходящейся, то она всегда может быть приведена к равнодействующей.
Пусть
![]() – равнодействующая системы сходящихся
сил, действующих на МТ.
– равнодействующая системы сходящихся
сил, действующих на МТ.
Для свободной МТ равнодействующая равна геометрической сумме сходящихся активных сил, действующих на нее:
![]() ,
,
где
![]() –-я
активная (заданная) сила, действующая
на МТ, n
– количество активных сил.
–-я
активная (заданная) сила, действующая
на МТ, n
– количество активных сил.
Для несвободной МТ равнодействующая равна геометрической сумме сходящихся активных (заданных) сил и пассивных сил (сил реакций связей):
![]() ,
,
где
![]() –-я
пассивная сила (сила реакции связи),
действующая на МТ,
- количество пассивных сил.
–-я
пассивная сила (сила реакции связи),
действующая на МТ,
- количество пассивных сил.
На основании второго (основного) закона динамики (1.2) с учетом соотношения (1.3) (Ч. 1 Кинематика), определяющим формулу для ускорения МТ при векторном способе задания движения:
![]() ,
,
получим дифференциальное уравнение движения МТ постоянной массы в векторной форме (рис. 1):
![]() .
(1.6)
.
(1.6)
Спроектировав соотношение (1.6) на оси декартовой системы координат Oxyz и использовав соотношения (1.12) (Ч. 1 Кинематика), определяющее проекцию ускорения МТ на оси декартовой системы координат:
![]() ,
,![]() ,
,![]() ,
,
получим дифференциальные уравнения движения МТ в проекциях на эти оси (рис. 1):
![]() (1.7)
(1.7)
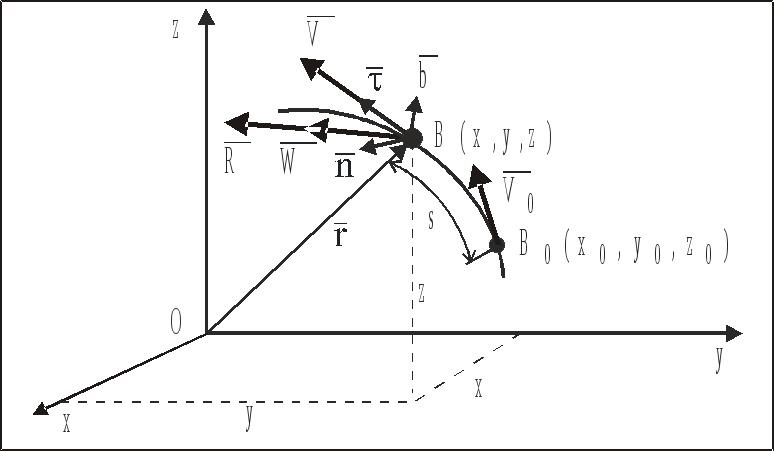
Рис.1
Спроектировав
соотношение (1.2) на оси естественного
трехгранника (![]() )
и использовав соотношения (1.25) и (1.27)
(Ч. 1 Кинематика), определяющие формулы
для ускорения МТ при естественном
способе задания движения:
)
и использовав соотношения (1.25) и (1.27)
(Ч. 1 Кинематика), определяющие формулы
для ускорения МТ при естественном
способе задания движения:
![]() ,
,
![]() ,
,![]() ,
,
получим дифференциальные уравнения движения МТ в проекциях на оси естественного трехгранника (рис. 1):
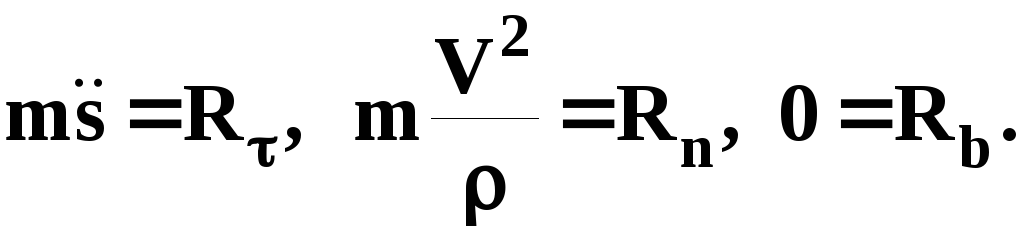 (1.8)
(1.8)
Рассмотрены наиболее используемые случаи уравнений движения МТ. Аналогично можно получить дифференциальные уравнения движения МТ в других системах координат (полярной, цилиндрической, сферической и т. д.).
1.3. Две основные задачи динамики мт
1.3.1. Первая (прямая) задача динамики мт
Первая задача динамики МТ заключается в том, что, зная массу МТ и заданные тем или иным способом уравнения или кинематические параметры ее движения, необходимо найти действующие на МТ силы.
Первая задача динамики решается, используя соотношения (1.6) – (1.8) в зависимости от способа задания движения (в основном используется операция дифференцирования).
Например, если заданы уравнения движения МТ в декартовой системе координат:
![]()
то
проекции на оси координат силы
![]() ,
действующей на МТ, определятся после
использования соотношений (1.7):
,
действующей на МТ, определятся после
использования соотношений (1.7):
![]()
Зная проекции силы на координатные оси, легко определить модуль силы и направляющие косинусы углов, которые составляет сила с осями декартовой системы координат.
Первая задача динамики для несвободной МТ достаточно часто сводится к тому, чтобы, зная массу МТ, уравнения или кинематические параметры ее движения и действующие на нее активные силы (заданные силы), определить пассивные силы (реакции связи).