

1.5.4. Колебательное движение мт в среде без
сопротивления под действием возмущающей силы в случае, когда частота вынужденных колебаний не совпадает
с частотой собственных колебаний (р )
В этом случае n = 0 и, следовательно, = 0, а общее решение имеет вид:
![]() ,
(1.27)
,
(1.27)
где
![]() ,а
и
– постоянные интегрирования, которые
находятся из начальных условий.
,а
и
– постоянные интегрирования, которые
находятся из начальных условий.
В случае, когда частота возмущающей силы близка к частоте собственных колебаний, амплитуда вынужденных возрастает (рис. 5 при = 0).
1.5.5. Колебательное движение МТ в среде без
сопротивления под действием возмущающей силы в случае, когда частота вынужденных колебаний совпадает с частотой собственных колебаний – явление резонанса (р = )
В этом случае из формулы (1.21) следует, что амплитуда вынужденных колебаний b стремится к бесконечности и частное решение х2 необходимо искать в другом виде, так как полученная ранее система двух уравнений для определения b и при n = 0 и p = не имеет смысла. Найдем частное решение в виде:
![]() .
.
Подставив это частное решение в уравнение
![]() ,
,
получим систему двух уравнений, решение которой имеет вид:
![]() .
.
Следовательно, общее решение при р = будет:
![]() .
(1.28)
.
(1.28)
В случае, когда движение МТ происходит в среде без сопротивления и частота возмущающей силы становится равной частоте собственных колебаний (p = ), амплитуда вынужденных колебаний с течением времени неограниченно возрастает (рис. 9).
Такое явление носит название резонанса (рис. 5 при = 0).
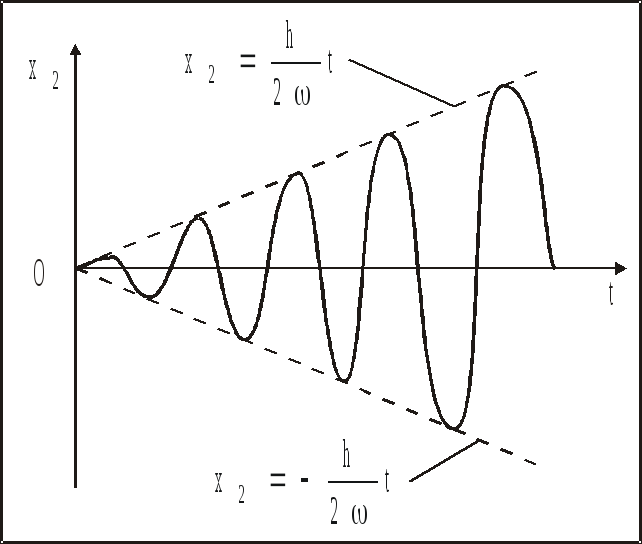
Рис. 9
При
наличии сопротивления среды максимальное
значение амплитуды вынужденных колебаний
достигается при значениях
![]() (рис. 5 при
0) и также называется явлением резонанса.
В случае малого сопротивления среды
(
(рис. 5 при
0) и также называется явлением резонанса.
В случае малого сопротивления среды
(![]() )
явление резонанса наступает при значениях
вынужденной частоты р, близких к
собственной частоте.
)
явление резонанса наступает при значениях
вынужденной частоты р, близких к
собственной частоте.
Явление резонанса играет большую роль в акустике, радиотехнике и при динамическом расчете сооружений.
1.5.6. Колебательное движение мт в поле силы тяжести, в среде с сопротивлением под действием возмущающей силы
МТ массы m (рис. 10), подвешенная к пружине с коэффициентом жесткости с, находится в среде с сопротивлением, пропорциональным первой степени скорости, и на нее действует вертикальная гармоническая возмущающая сила. Найти уравнение движения МТ, если известны ее начальное положение – координата х0 и ее начальная скорость – V0, направленная по вертикали.
ст
Рис. 10
Пусть Fу = –с –сила упругости пружины (восстанавливающая сила), где – удлинение пружины;
![]() –сила сопротивления
среды, где
–сила сопротивления
среды, где ![]() – постоянный коэффициент сопротивления
среды;
– постоянный коэффициент сопротивления
среды;
Нв = H sin pt – возмущающая сила, где Н – амплитуда (наибольшее значение), а р – угловая частота возмущающей силы.
Ось
х направлена вертикально вниз, а начало
координат (точка О) выбрано в положении
статического равновесия, для которого
![]() .
.
Силовая схема изображена на рис. 10.
Составим уравнение движения:
![]() .
.
Учтя,
что
![]() ,
P=cст,
дифференциальное уравнения колебательного
движения МТ примет вид:
,
P=cст,
дифференциальное уравнения колебательного
движения МТ примет вид:
Приведя это уравнение к каноническому виду, получим:
![]() .
.
Используем уже введенные обозначения
![]() .
.
Тогда дифференциальное уравнение движения примет вид:
![]() .
.
Это линейное, неоднородное дифференциальное уравнение второго порядка, решения которого в общем и различных частных случаях представлены в пунктах 1.5.1 – 1.5.5.
Примечания.
Если колебательное движение МТ происходит на наклонной плоскости, то ось х направляется вдоль этой плоскости и все силы, действующие на МТ, проектируются на эту ось.
Если плоскость горизонтальна, то задача упрощается, так как ст и проекция силы тяжести Р на ось х будут равны нулю.
Если МТ подвешена к нескольким пружинам разной жесткости, соединенных последовательно или параллельно, то эти пружины заменяются одной им эквивалентной пружиной.