

Содержание
|
|
Часть I |
стр. |
|
1. |
Обоснование основных параметров и анализ технологических свойств лемешно-отвальной поверхности корпуса плуга |
3 |
|
2. |
Рабочее сопротивление плугов и определение числовых характеристик тягового сопротивления рабочих органов почвообрабатывающих машин |
29 |
|
3. |
Обеспечение устойчивости хода навесного плуга по глубине и ширине захвата |
39 |
|
4. |
Основные технологические показатели работы почвенной фрезы |
57 |
|
5. |
Изучение свойств зубового поля бороны |
68 |
|
6. |
Обоснование основных параметров дисковых рабочих органов почвообрабатывающих машин |
80 |
|
7. |
Обоснование основных параметров рабочих органов культиваторов |
93 |
|
8. |
Технологический процесс, осуществляемый центробежными дисковыми рабочими органами машин для внесения удобрений |
103 |
|
9. |
Технологический процесс, осуществляемый зерновой сеялкой |
115 |
|
|
Часть II |
|
|
1. |
Определение характеристик технологического процесса работы мотовила уборочных машин |
|
|
2. |
Анализ работы режущих аппаратов уборочных машин |
|
|
3. |
Анализ технологического процесса обмолота зерна |
|
|
4. |
Анализ технологического процесса выделения зерна на соломотрясе |
|
|
5. |
Анализ технологических показателей и обоснование режимов работы грохота уборочных машин |
|
|
6. |
Вентиляторы, их теория и расчет |
|
|
7. |
Анализ технологического процесса сушки сельскохозяйственных материалов |
|
|
8. |
Составление схемы очистки семян сельскохозяйственных культур |
|
|
9. |
Анализ технологических свойств цилиндрического триера |
|
1.0. Обоснование основных параметров и анализ технологических свойств лемешно-отвальной поверхности корпуса плуга
1.1. Способы образования лемешно-отвальной поверхности корпуса плуга
В фрагменте из рукописи основного положения науки "Земледельческая механика", академика В.П. Горячкина "К истории плуга" просматривается логическая схема исторического развития этого древнейшего орудия (схемы В.П. Горячкина и доктора Рау) [1].
С начала для обработки почвы использовался кривой заостренный кол (рис.1а).

Рис. 1.1. Начальная стадия развития плуга
Изображения такого орудия (рис. 1.2а) найдены при раскопках в Этрурии (Италия) и Сиракузах (Сицилия).
|
|
|
|
а |
б |


Рис.1.2. Изображение бороздящего почвообрабатывающего орудия и схема его воздействия на почву
В основу работы такого орудия и схема в основу работы такого орудия был положен принцип крошения почвы клином (рис. 1.2 б).
Для повышения устойчивости плуга со временем стали подбирать такой ствол дерева, у которого помимо сука, используемого для крошения, был бы еще сук, направленный вверх для управления ходом орудия (рис.1.1б). Изображения таких орудий найдены на римских и греческих памятниках времен Юлия Цезаря.
Трудности с подбором дерева с необходимой прочностью и нужным расположением сучьев привели к изготовлению плуга из двух элементов (рис.1.1г) представляют собой уже орудия, прошедшие через века - рало (рис.1.3а), коловую соху (цапугу) (рис.1.3б) и великорусскую соху (рис.1.3в).
|
|
|
|
|
а - однозубое рало |
б - коловая соха |
в - великорусская соха |

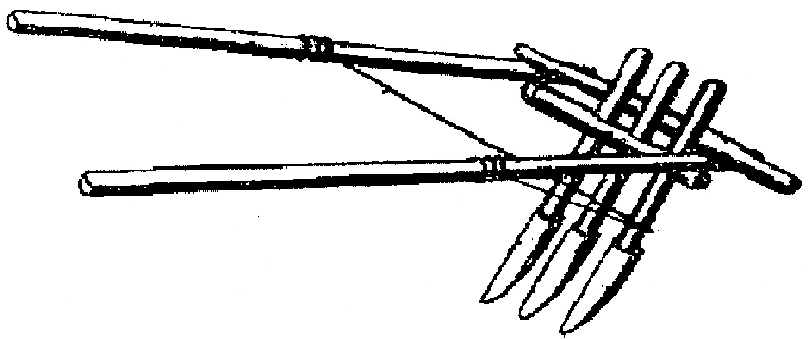

Рис. 1.3. Орудия русских крестьян
Вспашки этими орудиями связаны с большими затратами труда. Пахарь должен прикладывать к рукояткам большие усилия, чтобы удерживать необходимый угол входа и обеспечивать устойчивый ход. Кроме того, при ширине захвата 18...20 см при вспашке 1 га необходимо было пройти за сохой расстояние, превышающее 50 км.
Значительно устойчивей в почве перемещался плуг, у которого к грядилю прикреплен полоз (рис.1д) римский плуг, на котором он скользит по дну борозды. Укрепленный вариант этого орудия (рис.1.1е) применялся в Италии, Греции, Южной Франции до 5 века нашей эры, а улучшенная конструкция использовалась до 17 века.
Римский плуг и его модификации удовлетворительно работал на старопахотных почвах, обеспечивая их рыхление. При вспашке задернелых участков пласт, подрезанный лемехом, необходимо было оборачивать, чтобы заделать растительные остатки. Сначала это делали вручную, а затем плоскую деревянную доску укрепили к полозу под углом к направлению движения и дну борозды. Так появился отвал.
Плоскость, расположенную под углом к направлению движения и дну борозды можно представить как поверхность трехгранного клина. Почва, взаимодействующая с трехгранным клином, будет испытывать деформацию сжатия, как и от простого двухгранного (рис.1.2б) клина с углом α.
Но кроме этого трехгранный клин может осуществить сдвиг пласта в поперечно-вертикальной плоскости за счет угла β (рис.1.3).
|
|
Рис.1.3. Трехгранный клин как элемент отвала: α - угол крошения, β - угол оборота пласта, ε - угол постановки поверхности к дну борозды |

в общем случае даже современную сложную поверхность корпуса плуга можно представить как дальнейшее развитие трехгранного клина, у которого углы α,β,γ и ε изменяются по определенными закону.
В то же время, если лемешно-отвальную поверхность разделить на ряды бесконечно малых элементов, то они окажутся элементарными трехгранными клиньями.
Дальнейшее развитие плуга прежде всего шло по линии совершенствования отвала. Рост торговых и ремесленных городов в 16...17 веках вызвал повышение спроса на хлеб. Районом наиболее интенсивного роста было побережье Балтийского моря (Голландия, Бельгия, Роттердам).
Здесь впервые для обработки использовали железный отвал (брабантский плуг), объединили лемех и отвал в одно целое (ротердамский плуг) и придали лемешно-отвальной поверхности, англичанин Бейли в 1795 году по скрученному пласту создал геликоидальный (винтовой) отвал (рис.1.4).
В 1797 г. президентом США Т. Джефферсоном был предложен отвал, построенный на основе гиперболического параболоида (рис.1.5).
|
|
|
|
Рис.1.4. Геликоидальный отвал |
Рис.1.5. Гиперболический параболоид |


Поверхность гиперболического параболоида получается при перемещении прямой линии АВ параллельно плоскости ZOY по направляющим прямым АС и ВД. От геликоида гиперболический параболоид отличается законом изменения угла β.
Необходимо отметить, что геликоид и гиперболический параболоид в чистом виде не могут быть использованы для лемешно-отвальной поверхности, так как при обороте пласт опирается на почву разными гранями.
В 1832 г. итальянские аббаты Лямбручини и Ридольфи предложили использовать для отвала поверхность, состоящую из двух геликоидов, соответствующих вращению пласта вокруг разных ребер (рис.1.6, 1.7). Отвалы винтового типа не обеспечивают качественного крошения пласта. В 1827 г. братья Ваверки из Богемии предложили использовать цилиндрическую (рухадловую) поверхность (рис.1.8).
Хорошее качество крошения обеспечивается у этой поверхности за счет непрерывного плавного увеличения угла крошения почвы.
Цилиндрическая поверхность образуется за счет перемещения прямолинейной горизонтальной образующей АВ по направляющей кривой СВ с постоянным углом γ наклона образующей к стенке борозды (рис.1.8).
Недостатком цилиндрической поверхности является неудовлетворительный оборот пласта, так как угол оборота пласта β<90° (рис.1.10а). Устранение этого недостатка осуществлено в Германии немецким механиком Рудольфом Сакком. Им была введена цилиндроидальная поверхность, близкая к поверхности современного культурного типа (рис. 1.9).
У цилиндроидальной поверхности угол наклона горизонтальных образующих к стенке борозды γ при перемещении по направляющей кривой ВС непрерывно изменяется. За счет увеличения угла верхних образующих создается подгиб крыла, способствующий улучшению оборачивающей способности корпуса плуга (рис.1.10б).
Цилиндроидальный отвал может иметь различные размеры, закономерности развития углов и пределы их изменения. Поверхность может быть крутой или пологой по отношению к дну борозды.
В зависимости от этого у отвала могут меняться технологические свойства - крошащая или оборачивающая способность.
|
|
|
|
Рис.1.7. Взаимодействие почвы с совокупностью клиньев | |
|
| |
|
Рис.1.6. Комбинированный геликоид |
Рис. 1.8. Цилиндрический отвал |



|
|
Рис. 1.9. Отвал цилиндроидального типа |
|
|
|
|
а |
б |

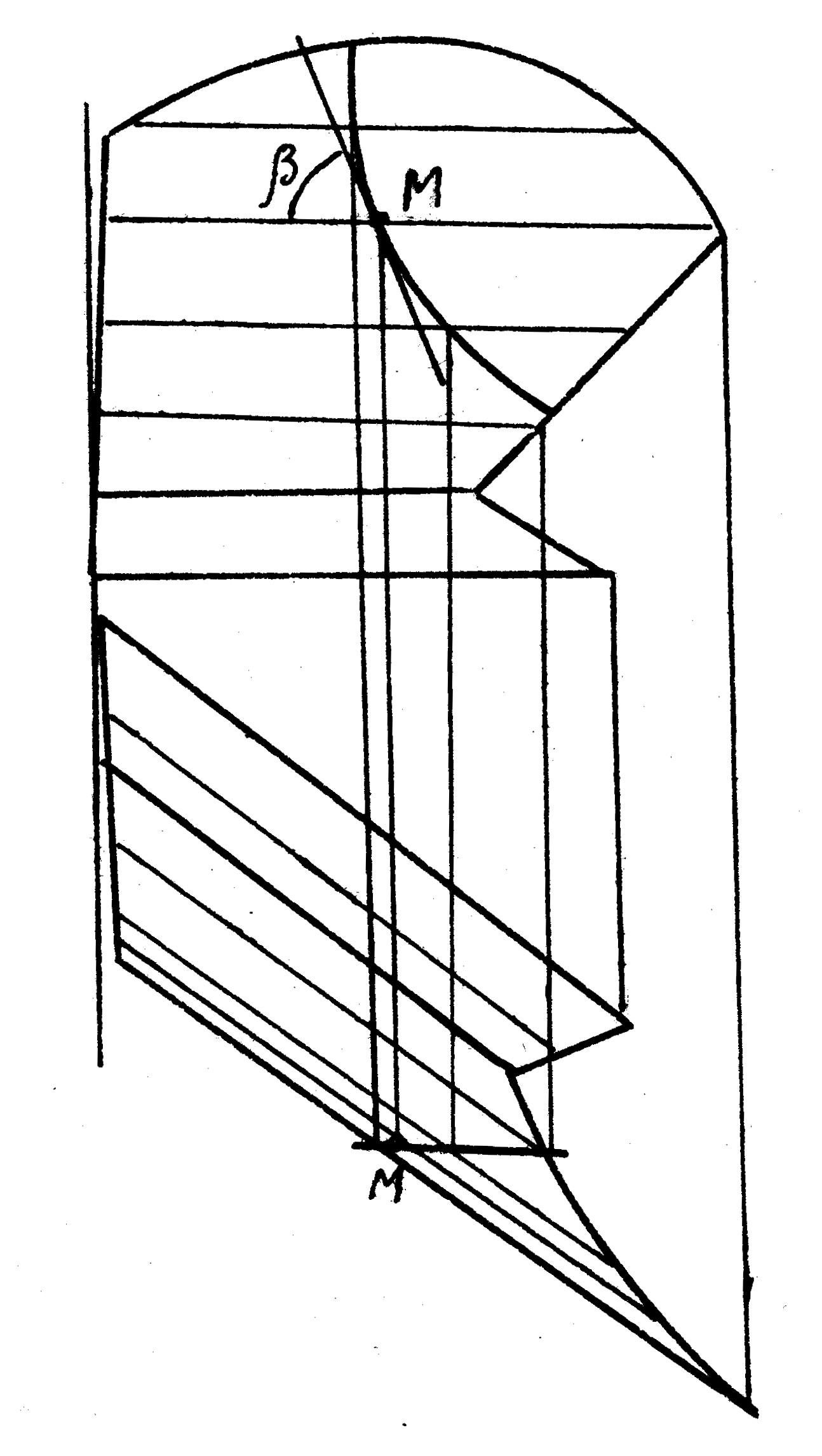

Рис. 1.10. Угол оборота пласта у цилиндрической (а) и цилиндроидальной (б) поверхностей
Цилиндроидальная поверхность может быть получена и другим методом, например, путем перемещения горизонтальной прямолинейной образующей по двум направляющим кривым, одна из которых расположена в плоскости полевого обреза, а другая - в сечении, перпендикулярном к лезвию лемеха (рис.1.11).
|
|
Рис.1.11. Способ образования цилиндроидальной поверхности по двум направляющим кривым |

При замене одной из направляющих прямой линией можно получить поверхность, по своей форме являющуюся переходной между цилиндроидальными и винтовыми отвалами, так называемый коноид (рис.1.12).
|
|
Рис. 1.12. Коноид как основа лемешно-отвальной поверхности |

Академик В.П. Горячкин, много занимавшийся исследованиями плужных корпусов, пришел к выводу, что цилиндроид в общем виде довольно близко приближается к отвалам существующих плугов, обеспечивающих высокое качество работы. Очень редко среди отвалов встречается цилиндрический и еще реже коноид.
На основе цилиндроидальной поверхности в нашей стране были созданы корпусы культурного и полувинтового типов, получившие широкое распространение в сельскохозяйственном производстве.
Недостатки цилиндроидальных отвалов стали проявляться в связи с переходом пахотных агрегатов на высокие рабочие скорости. Повышение тягового сопротивления и неоправданная дальность отбрасывания почвы в этих условиях вызвала необходимость поиска новых форм лемешно-отвальной поверхности. Прежде всего у скоростных плугов были изменены параметры цилиндроидальной поверхности - уменьшены углы постановки к дну и стенке борозды, использована новая форма закономерности изменения углов γ.
Наряду с этим появились и новые формы отвалов. Прежде всего это, так называемые, развертывающиеся поверхности. Так как такие поверхности получаются перегибом плоского листа около сети прямых линий, расположенных в определенном порядке, то пласт, прилегая к такой поверхности, будет деформироваться без образования разрывов и складок. Примером такого подхода к созданию лемешно-отвальной поверхности является корпус, представляющий собой сочетание плоскости, двух усеченных конусов с вершинами, лежащими по разные стороны от отвала и цилиндра верхней части.
|
|
Рис.1.13. Корпус скоростного плуга с развертывающейся поверхностью: S1B1A1 - нижний конус; S1Д1С1 - верхний конус; АВСД - цилиндр верхней части отвала |

Обоснование основных параметров лемешно-отвальной поверхности
Размеры лемешно-отвальной поверхности прежде всего зависят от глубины обработки а и ширины пласта в. Теоретическая профиль борозды определяет контур рабочей поверхности в поперечно-вертикальной плоскости.
Если считать, что при обработке геометрическая форма пласта не изменится, то пласт АВСД (рис. 1.14) после поворота сначала вокруг грани А, а затем Д будет уложен на ранее отваленные пласты под углом δ к горизонту.

Рис. 1.14. Схема оборота пласта
Угол наклона пласта к горизонту δ зависит от соотношения размеров пласта. Из рис.1.14 следует, что
 . (1.1)
. (1.1)
Если отношение ширины пласта к глубине обозначить коэффициентом
 ,
то (1.2)
,
то (1.2)
 . (1.3)
. (1.3)
Из уравнения (1.3.)
следует, что с изменением глубины вспашки
изменится и угол наклона пласта.
Предельный наклон пласта находят из
условия устойчивости отваленного
пласта. Обычно при вспашке центр тяжести
отваленного пласта расположен правее
точки D
(рис.1.15а). В этом случае под воздействием
силы тяжести пласт прижат к ранее
отваленному пласту и сохраняет устойчивое
положение. С увеличением глубины вспашки
угол наклона пласта возрастает, и при
некотором, предельном значении, . центр
тяжести пласта может оказаться на одной
вертикали с точкой
 (рис.1.15б). Это и будет предельно устойчивое
положение пласта, т.к. при дальнейшем
увеличении глубины пласт опрокинется
обратно в борозду.
(рис.1.15б). Это и будет предельно устойчивое
положение пласта, т.к. при дальнейшем
увеличении глубины пласт опрокинется
обратно в борозду.

Рис.1.15. Условие устойчивого положения пласта
Треугольники
 и
и (рис.1.15б) подобны, т.к. все стороны одного
из них взаимно-перпендикулярны сторонам
другого и следовательно, все их углы
равны. Из подобия треугольников следует
(рис.1.15б) подобны, т.к. все стороны одного
из них взаимно-перпендикулярны сторонам
другого и следовательно, все их углы
равны. Из подобия треугольников следует
 ,
,
но т.к.
 ;
; ;
; ;
; ,
,
то
 ,
,
отсюда
 .
.
Разделив правую и левую части на а2, будем иметь
 .
(1.4)
.
(1.4)
Корнем этого уравнения является Кпред.=1,27. Значение Кпред. используется для определения предельной глубины вспашки
 .
(1.5)
.
(1.5)
В случае вспашки почвы плугом с предплужником задача определения угла наклона отвального пласта и предельного значения Кпред. несколько усложняется (рис.1.16).

Рис.1.16. Схема оборота пласта плугом с предплужником.
Как правило, а1=0,5а; b2=2b/3, тогда
 . (1.6)
. (1.6)
Следовательно, при вспашке с предплужником пласт оборачивается полнее и отвальный пласт сохраняет большую устойчивость. Вычисление предельно-малого значения Кпред. показало, что центр тяжести сечения пласта окажется на вертикали при К=0,94, а рекомендуемое значение Кпред=1,14...1,25.