

1.4 Заключение
В этой части курсовой работы была проведена идентификация обыкновенного дифференциального уравнения первого порядка с постоянными коэффициентами с помощью двух программных приложений - ExcelиDelphi.
Результаты, полученные при использовании этих двух пакетов, показали идентичные решения: в среде Excel- А = 1,0189, К = 1,0009; в средеDelphi– А = 1,00296, К=1,0034. В итоге можно утверждать, что процесс в объекте описывается идентифицированным обыкновенным линейным дифференциальным уравнением первого порядка с постоянными коэффициентами А = 1 и К = 1:
![]()
Тем не менее, в обеих программных средах была проведена проверка полученных решений. В Excelэта проверка осуществлялась методом трапеций. Полученная проверочная диаграмма (рисунок 1.7) подтверждает правильность решения. При идентификации вDelphiприложение дает оценкуR2= 0,999025, вExcel-R2= 0,998959.
2 Исследование динамики системы
2.1 Постановка задачи
Система состоит из объекта регулирования и регулятора. Схема системы представлена на рис. 2.1.
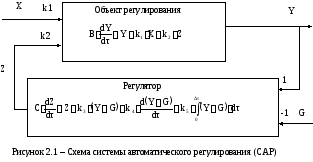
Математическая модель объекта регулирования (2.1)
![]() ,
,![]() . (2.1)
. (2.1)
Математическая модель регулятора (2.2)
![]() ,
,![]() .
(2.2)
.
(2.2)
![]() ,
,
![]() .
.
Принятые условные обозначения:
![]() – время;
– время;
X– внешнее воздействие;
Y– реакция объекта;
Z– регулирующее воздействие;
G– настройка регулятора;
B,k1,k2 - коэффициенты отражающие свойства объекта;
C,k3,k4, k5 - коэффициенты отражающие свойства регулятора.
2.2 Запись конечно-разностных аналогов дифференциальных уравнений
Используется разностная неявная схема.
![]()
(2.3)
![]()
После преобразований получим разностные уравнения:
![]()
![]()
![]()
![]()
![]()
В компактной записи:
![]() (2.4)
(2.4)
![]()
где
![]()
![]()
![]()
Решение алгебраической системы уравнений (2.4) можно проводить итерационно, но можно использовать прямые методы. В последнем случае формируется матрица коэффициентов и вектор правых частей:
|
Матрица |
|
Вектор правой части | |
|
Y |
Z |
|
|
|
1 |
-D3 |
|
|
|
-D5 |
1 |
|
|
2.3 Решение в среде Excel
Исходные данные:
|
B= |
1 |
С= |
4 |
τ= |
0 |
a0= |
1 |
b0= |
2 |
|
k1= |
4 |
k3= |
2 |
Υ0= |
0 |
a1= |
1 |
b1= |
0 |
|
k2= |
-1,5 |
k4= |
1,5 |
Ζ0= |
0 |
a2= |
1 |
b2= |
0 |
|
Δτ= |
0,1 |
k5= |
1 |
|
|
a3= |
1 |
|
|
|
|
|
|
|
|
|
a4= |
-0,1 |
|
|
Коэффициенты, получены в результате расчета:
-
D1=
0,90909
D5=
0,41707
D2=
0,36364
D6=
-0,3659
D3=
-0,1364
D7=
-0,4171
D4=
0,97561
D8=
0,36585
Таблица 2.1 – Решение системы уравнений (2.4) в среде Excel
|
|
|
|
|
|
|
|
I |
τ |
X |
G |
Y |
Z |
|
0 |
0,0 |
1,841 |
2 |
0,0000 |
0,0000 |
|
1 |
0,1 |
1,882 |
2 |
0,6609 |
0,1732 |
|
2 |
0,2 |
1,914 |
2 |
1,2495 |
0,3459 |
|
3 |
0,3 |
1,935 |
2 |
1,7692 |
0,5158 |
|
4 |
0,4 |
1,947 |
2 |
2,2235 |
0,6808 |
|
5 |
0,5 |
1,949 |
2 |
2,6156 |
0,8392 |
|
6 |
0,6 |
1,941 |
2 |
2,9488 |
0,9893 |
|
7 |
0,7 |
1,925 |
2 |
3,2266 |
1,1296 |
|
8 |
0,8 |
1,899 |
2 |
3,4521 |
1,2589 |
|
9 |
0,9 |
1,865 |
2 |
3,6288 |
1,3763 |
|
10 |
1,0 |
1,823 |
2 |
3,7598 |
1,4808 |
|
11 |
1,1 |
1,773 |
2 |
3,8485 |
1,5718 |
|
12 |
1,2 |
1,717 |
2 |
3,8982 |
1,6488 |
|
13 |
1,3 |
1,655 |
2 |
3,9121 |
1,7117 |
|
14 |
1,4 |
1,587 |
2 |
3,8936 |
1,7601 |
|
15 |
1,5 |
1,515 |
2 |
3,8459 |
1,7943 |
|
16 |
1,6 |
1,439 |
2 |
3,7723 |
1,8144 |
|
17 |
1,7 |
1,361 |
2 |
3,6758 |
1,8207 |
|
18 |
1,8 |
1,280 |
2 |
3,5597 |
1,8137 |
|
19 |
1,9 |
1,198 |
2 |
3,4271 |
1,7940 |
|
20 |
2,0 |
1,116 |
2 |
3,2808 |
1,7623 |
|
21 |
2,1 |
1,034 |
2 |
3,1240 |
1,7195 |
|
22 |
2,2 |
0,953 |
2 |
2,9593 |
1,6665 |
|
23 |
2,3 |
0,875 |
2 |
2,7896 |
1,6042 |
|
24 |
2,4 |
0,799 |
2 |
2,6174 |
1,5337 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
τ |
X |
G |
Y |
Z |
|
25 |
2,5 |
0,727 |
2 |
2,4452 |
1,4561 |
|
26 |
2,6 |
0,659 |
2 |
2,2753 |
1,3725 |
|
27 |
2,7 |
0,596 |
2 |
2,1099 |
1,2842 |
|
28 |
2,8 |
0,538 |
2 |
1,9510 |
1,1922 |
|
29 |
2,9 |
0,485 |
2 |
1,8004 |
1,0978 |
|
30 |
3,0 |
0,439 |
2 |
1,6599 |
1,0022 |
|
31 |
3,1 |
0,400 |
2 |
1,5307 |
0,9065 |
|
32 |
3,2 |
0,367 |
2 |
1,4144 |
0,8118 |
|
33 |
3,3 |
0,341 |
2 |
1,3119 |
0,7192 |
|
34 |
3,4 |
0,323 |
2 |
1,2240 |
0,6298 |
|
35 |
3,5 |
0,311 |
2 |
1,1517 |
0,5445 |
|
36 |
3,6 |
0,307 |
2 |
1,0952 |
0,4642 |
|
37 |
3,7 |
0,309 |
2 |
1,0550 |
0,3898 |
|
38 |
3,8 |
0,319 |
2 |
1,0311 |
0,3219 |
|
39 |
3,9 |
0,335 |
2 |
1,0235 |
0,2613 |
|
40 |
4,0 |
0,357 |
2 |
1,0319 |
0,2084 |
|
41 |
4,1 |
0,386 |
2 |
1,0560 |
0,1638 |
|
42 |
4,2 |
0,420 |
2 |
1,0951 |
0,1277 |
|
43 |
4,3 |
0,459 |
2 |
1,1486 |
0,1006 |
|
44 |
4,4 |
0,502 |
2 |
1,2156 |
0,0825 |
|
45 |
4,5 |
0,550 |
2 |
1,2951 |
0,0734 |
|
46 |
4,6 |
0,601 |
2 |
1,3861 |
0,0735 |
|
47 |
4,7 |
0,656 |
2 |
1,4873 |
0,0825 |
|
48 |
4,8 |
0,713 |
2 |
1,5975 |
0,1002 |
|
49 |
4,9 |
0,771 |
2 |
1,7154 |
0,1263 |

Рисунок 2.2 – результат решения в среде Excel