

Рішення задачі розгону
Нехай
початкова швидкість об’єкту
![]() .
Необхідно
за
час T
розігнати його до швидкості
.
Необхідно
за
час T
розігнати його до швидкості
![]() :
:![]() ,
,
(1) При
одній граничній умові
![]() управління набуде виду:
управління набуде виду:![]()
|
(2) |
|
(2) |

Рівняння для S не знадобиться.
(3)
![]()
За
означенням,![]() звідки бачимо, що
звідки бачимо, що
|
|
(3) |
це кінцевий результат в першому наближенні. Таким чином, вирішили задачу розгону:
![]()
|
|
(4) |
постійне
прискорення, яке будучи прикладеним до
об’єкту,
за час T
розгонить його до швидкості
![]() .
.
Однак
такий спосіб управління є програмним
![]() розімкненим по управляючій фазовій
координаті
розімкненим по управляючій фазовій
координаті
![]() ,
він не враховує помилок, які з’являються
в процесі. Необхідний обернений зв’язок
,
він не враховує помилок, які з’являються
в процесі. Необхідний обернений зв’язок
![]() .
Таким чином, вирішивши проблему
термінального управління – ми породили
нову проблему – проблему введення
зворотнього зв’язку.
.
Таким чином, вирішивши проблему
термінального управління – ми породили
нову проблему – проблему введення
зворотнього зв’язку.
(4) Введення зворотнього зв’язку
Будемо
вважати текучий фазовий стан об’єкта
початковим, тому в (4)
![]() замінимо на поточну швидкість
замінимо на поточну швидкість![]() ,
а заданий час розгону
,
а заданий час розгону![]() - на залишившийся час
- на залишившийся час![]() ,
де
,
де![]() відліковується з моменту початку
розгону. Отримаємо закон управління з
оберненим зв’язком:
відліковується з моменту початку
розгону. Отримаємо закон управління з
оберненим зв’язком:
|
|
(5) |
Закон
управління з оберненим зв’язком
(5) володіє особливістю в кінцевій точці
![]() В кінцевій момент
В кінцевій момент![]() - помилка кінцевого стану. Управління,
необхідні для виправлення помилки,
зростають з часом. При
- помилка кінцевого стану. Управління,
необхідні для виправлення помилки,
зростають з часом. При![]() .
Таким чином виникає чергова проблема
– проблема усунення особливості.
.
Таким чином виникає чергова проблема
– проблема усунення особливості.
Що ж це виходит – вирішили проблему, а виникла інша, це випадковість чи закономіреість?
Давайте познайомимся з загальними закономірностями.
4.1. Методологія рішення проблем (мрп)
Можливі три шляхи позбавленні від проблеми:
Ліквідування проблеми – зняття проблемної ситуації шляхом зміни початкового цілеспрямування, тобто зміни початкової мети;
Розв’язання проблеми - ліквідування проблемної ситуації шляхом використання одної з можливих альтернатив впливів;
Роз’язок проблеми – вибір з набору припустимих альтернатив впливів тої, яка приводить до оптимального або до бажаного стану.
Рішення проблеми вимагає знання:
Набору припустимих альтернатив – рішень;
Оцінки наслідків їх прийняття ;
Класифікація і (або) упорядкування припустимих альтернатив на підмножини не задовільних і задовільних.
При формуванні і рішенні важливих проблем корисно знати їх загальні закономірності, зокрема, закони ” методології рішення проблеми” (МРП)
Е. Шейля:
1-й закон МРП: будь – який розв’язок проблеми створює ще одну нову, що призводить до лавиноподібного росту кількості проблем і викликає бажання взагалі їх не розв’язувати;
2-й закон МРП: будь – який не розв’язок призводить до того, що розв’язок буде знаходитись спонтанно, тобто стихійно (випадково);
3-й закон МРП: за сумою проблем, як правило, існує одна велика, центральна проблема, а всі інші проблеми є тільки симптомами цієї центральної проблеми.
Наслідок 1. Лише системний підхід дозволяє за окремими проблемами побачити центральну.
Наслідок 2. Виявлення центральної проблеми та пошук її розв’язку – оптимальний шлях в методиці розв’язку проблем.
Веронемось до розв’язку проблеми ліквідування особистості.
? Що ви можите запропонувати, ваше рішення? ?
(5) Альтернативи усунення особливості.
Розглянемо наступні альтернативи усунення особливості:
5.1.
Якщо
вимоги до точності управління не дуже
жорсткі, то можно вважати розгон
виконаним, не доходячм до кінцевої точки
інтервала
![]() на малу величину
на малу величину![]() .
Помилка розгону при цьому буде дорівнювати:
.
Помилка розгону при цьому буде дорівнювати:
|
|
Відключення
системи управління, тобто
|

5.2.
При другому способі інтервал
![]()
![]() необхідно розбити на дві нерівних
ділянки:
необхідно розбити на дві нерівних
ділянки:![]() і
і![]() .
На більший з них
.
На більший з них![]() слід використати закон управління (5) з
зворотнім зв’язком. На заключній,
короткій ділянці
слід використати закон управління (5) з
зворотнім зв’язком. На заключній,
короткій ділянці![]() застосовується пограмне управління
(4). Практично це робиться так. В момент
часу
застосовується пограмне управління
(4). Практично це робиться так. В момент
часу![]() задане прискорення фіксується і в
подальшому підтримується незміним на
протязі залишкового часу руху
задане прискорення фіксується і в
подальшому підтримується незміним на
протязі залишкового часу руху![]() .
.
![]() ,
для
,
для
![]() ,
де
,
де![]() - фіксації управління, починаючи з
де-якого моменту
- фіксації управління, починаючи з
де-якого моменту![]() .
.
5.3.
В третьому способі кінцева фазова точка,
яка задається в якості мети управління
в законі (5), виноситься за межі ділянки
![]() на величину
на величину![]() секунд і розташовується на продовженні
фазової траєкторії, яка з’єднує
точки
секунд і розташовується на продовженні
фазової траєкторії, яка з’єднує
точки
![]() і
і![]() .
Ця винесена точка
.
Ця винесена точка![]() відноситься до моменту часу
відноситься до моменту часу![]() .
Об’єкт,
рухаючись до неї, при
.
Об’єкт,
рухаючись до неї, при
![]() пройде через точку
пройде через точку![]() ,
яка є метою управління.
,
яка є метою управління.
|
|
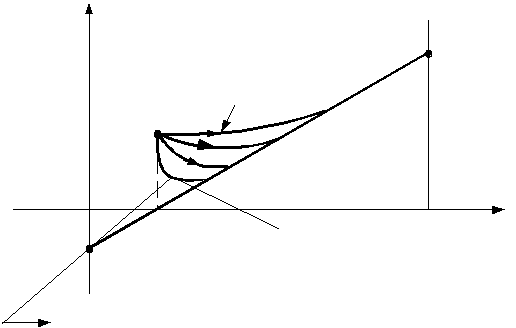
1. Нехай по якій-небудь причині виникла помилка 2. Виправлення помилки з ЗЗ 3. Рух об’єкта з прискоренням по програмному режиму |

5.4. Метод ведучої фазової точки
В
четвертому способі кінцева точка
![]() не виносяться за межі ділянки
не виносяться за межі ділянки![]() ,
а робиться рухомою і розташовується
спереді зображаючої фазової точки
об’єкта
на часовому інтервалі
,
а робиться рухомою і розташовується
спереді зображаючої фазової точки
об’єкта
на часовому інтервалі
![]() .
Таким чином, реалізується погоня об’єкта
за рухомою фазовою точкою. (Приклад про
змагання собак (тікаючий заяць) про
керування конем без возжей).
.
Таким чином, реалізується погоня об’єкта
за рухомою фазовою точкою. (Приклад про
змагання собак (тікаючий заяць) про
керування конем без возжей).
Нехай
необхідно перевести об’єкт
зі стану
![]() в стан
в стан![]() .
По формулі (4) обчислимо задане на ділянці
.
По формулі (4) обчислимо задане на ділянці![]() прискорення і використаємо його для
обчислення заданої програми руху, тобтотекучої
швидкості ведучої точки С
на ділянці
прискорення і використаємо його для
обчислення заданої програми руху, тобтотекучої
швидкості ведучої точки С
на ділянці
![]() .
.
|
|
(6) |

Закон управління (5) прийме форму:
|
|
(7) |

![]() -
жорсткість управління:
-
жорсткість управління:
Підставимо
в (7) вираз для
![]() (6),
приводимо закон управління (5) до виду:
(6),
приводимо закон управління (5) до виду:
|
|
(8) |

Від звичайного закона управління термінальне управління відрізняється наявністю програмних складових,

(“-“ зворотній від’ємний зв’язок)
Ведома
точка повторює рух ведучої з запізнюванням
по часу на
![]() секунд.
секунд.
Чим
меньша
![]() ,
тим швидше виходить об’єкт
на задану фазову траєкторію.
,
тим швидше виходить об’єкт
на задану фазову траєкторію.
(![]() - величина часового інтервала між точками
– жорсткість управління).
- величина часового інтервала між точками
– жорсткість управління).
![]() -
фазова
траєкторія руху об’єкта;
-
фазова
траєкторія руху об’єкта;
 - виникла
помилка (відхилення координат від
заданої траєкторії); чим меньше жорсткість
управління
- виникла
помилка (відхилення координат від
заданої траєкторії); чим меньше жорсткість
управління
 ,
тим швидше повертається на задану
траєкторію, але при цьому необхідно
прикласти більше прискорення.
,
тим швидше повертається на задану
траєкторію, але при цьому необхідно
прикласти більше прискорення.
![]() - слід
вибирати так, щоб
- слід
вибирати так, щоб
![]()