

4. Імпульсні сау
Спробуйте відповісти, виходячи з Вашого запасу знань, на наступні запитання
1.Що таке імпульсні системи (ІC) ?
2.Вони "гірше" чи "краще" неперервних ?
З.Чи знаєте Ви сучасні технічні системи, де використовуються імпульсні САУ ?
! Імпульсною САУ називається САУ, яка має хоча б один імпульсний елемент: вимірювач, підсилювач, привід і сам регулятор.
До імпульсних систем відноситься в частковості вся САУ з ЦОМ.
В імпульсних САУ деякі параметри змінюються скачками. Чи потрібні імпульсні САУ, може це САУ 2-го сорту в порівнянні з безперервними ? Які САУ багатші по можливостям - імпульсні чи безперервні?
4.1.Приклади імпульсних сау
1) Система управління потужним електроприводом (теристорами, напівпровідниками).
Для напівпровідникових елементів вигідна робота в режимі насичення, фактично в режимі "включено-виключено". Втрати в цьому випадку мінімальні. Тому системні регулювання потужних електроприводів роблять імпульсними.
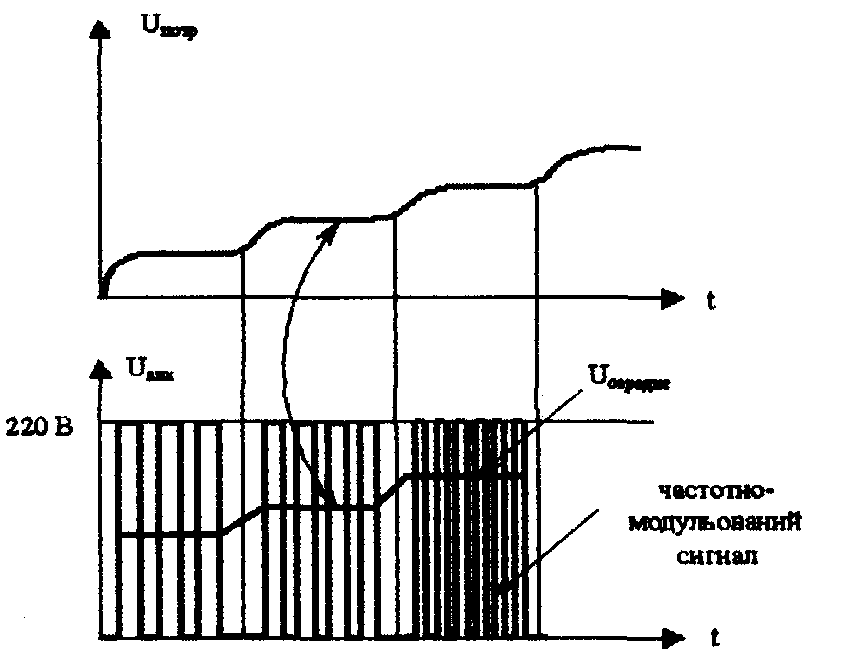
Рис.1. Частотно-імпульсна модуляція в системі
управління електроприводом.
2) САУ з ЦОМ.
ЦОМ - імпульсний елемент в силу принципів П функціонування. Вхідні сигнали сприймаються, а вихідні видаються дискретно, хоча частота квантування по часу може бути дуже великою. В ЦОМ сигнали квантовані не тільки по часу, але й по рівню. Оскільки розрядність дискретного представлення чисел в ЕОМ як правило
велика, то в більшості прикладних задач квантуванням по рівню нехтують.
Однак, це не завжди допустимо (накопичення похибок округлення).
к- номер кроку квантування вхідного сигнал а;
l- номер кроку квантування вихідного сигналу.
Рис.2. ЕОМ як елемент САУ
Слід відзначити що параметри квантування по рівню і по часу для входу і виходу ЦОМ не обов'язково повинні бути однаковими.
3) Радіолокаційні лазерні системи (для них також є звичайним режим "посилання -отримання" імпульсів)
4) Органи зору роботів
Навіть зорова система людини працює в імпульсному режимі сканування .(Якщо приклеїти мікро дзеркало на око, то можливо зафіксувати стрибки).
5) Цифровий запис звуку і зображень та їх послідовна обробка - фільтрація, кодування.
{Подивіться в літературі опис названих вище та інших імпульсних систем.}
4.2.Класифінація ісау
Процес перетворення безперервних сигналів в дискретні або квантовані сигнали називають квантуванням.
Розрізняють 3 способи квантування безперервних сигналів:
- по рівню;
- по часу;
- змішане по рівню і по часу.
В залежності від використаного типу квантування безперервного сигналу дискретні системи розділяються на:
релейні (квантування по рівню);
імпульсні (квантування по часу);
цифрові (змішане квантування).
Відносно задач синтезу та аналізу ІСАУ можуть бути розділені на:
- лінійні;
- нелінійні.
Нелінійні IСАУ підрозділяються на :
а)системи з лінійною безперервною частиною і нелінійним імпульсним елементом (ІЕ);
б)системи з нелінійною безперервною частиною і з лінійним ІЕ;
в)системи з нелінійною безперервною частиною і ІЕ.
В залежності від виду використаної в системі модуляції (процес квантування неперервного сигналу в ІС) або від типу ІЕ імпульсні системи поділяються на 4 класи:
амплітудно імпульсні (АІМ);
широтно-імпульсні (ШІМ);
фазоімпульсні(ФІМ);
частотно-імпульсні (ЧІМ).
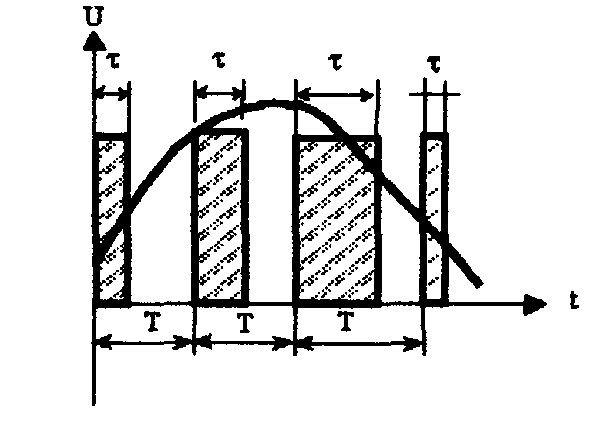
АІМ : амплітуда А вихідної послідовності імпульсів змінюється у відповідності з змінами вхідного сигналу. Тривалість τ і період повторення Т імпульсів постійні.
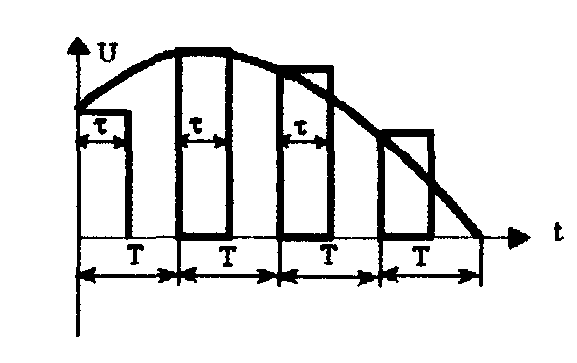
ШІМ : τ змінюється у відповідності зі змінами вхідного сигналу, а А і Т –const.
Розглянемо приклад перетворення сигналів в ФІМ.

![]()

Робочий імпульс, що несе інформацію про величину сигналу
Опорний імпульс
t
Uсереднє=0

При ФІМ міняється фаза деякого імпульсу відносно опорного. Часто опорні інпульси мають постійну частоту.
Імпульсна послідовність в ідеальному випадку повинна нести всю необхідну інформацію, що міститься в безперервному сигналі. Але при квантуванні по часу імпульсним елементом виділяються дискретні значення вхідного безперервного сигналу, що приводить до втрати частини інформації, вміщеній у вхідному сигналі. Цілком очевидно, що чим рідше квантується безперервний сигнал, тим важче відновити його форму після перетворення в ІЕ. Тону вибір частоти переривання ІЕ повинен відбуватися в залежності від форми вхідного сигналу, а дискретність квантування не повинна приводити до втрат інформації при проходженні безперервного сигналу через ІЕ.
Умови для вибору частоти переривання ІЕ визначаються на основі теореми Котельникова-Шеннона.