

2.2 Задание к.3. Кинематический анализ плоского механизма
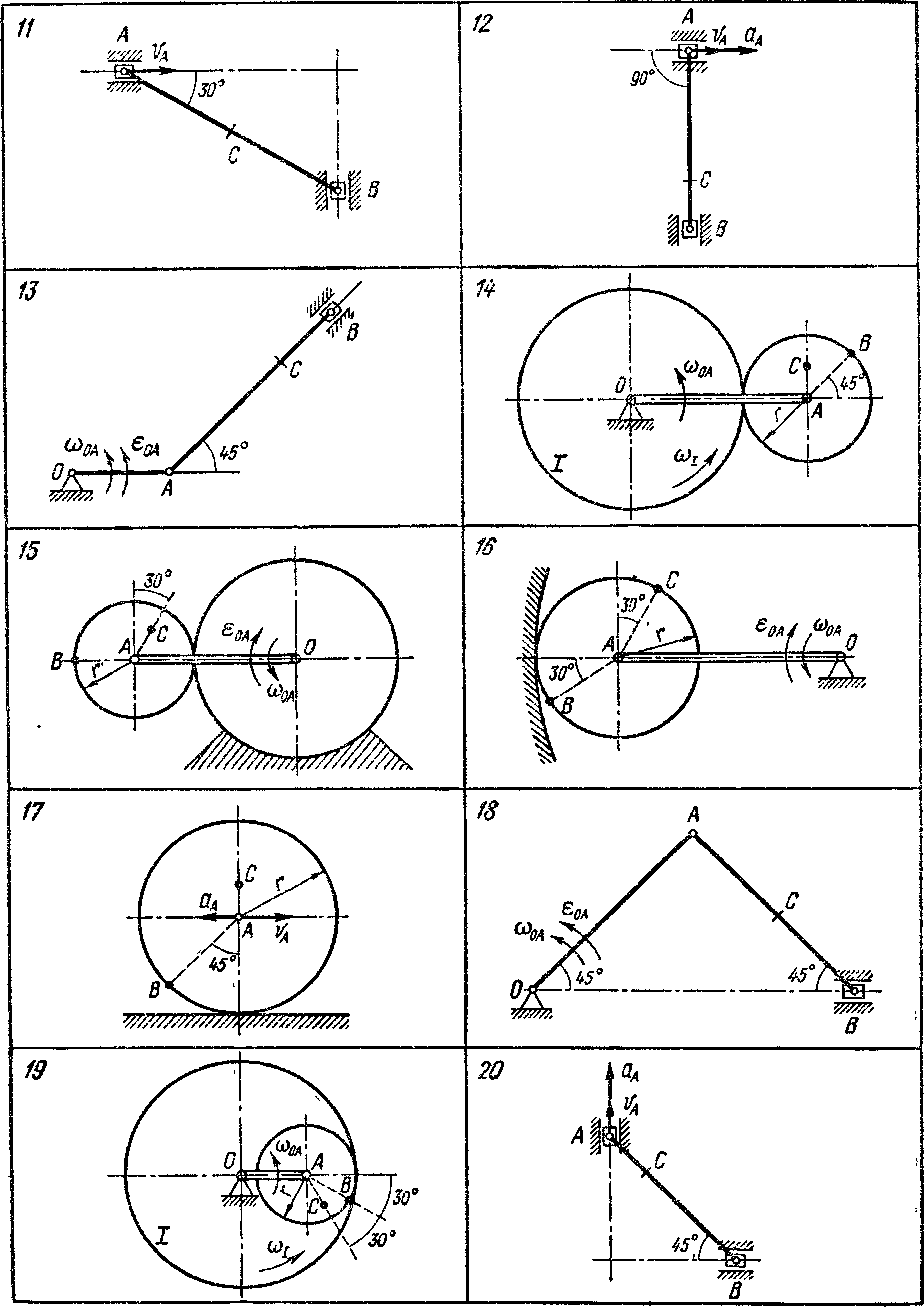
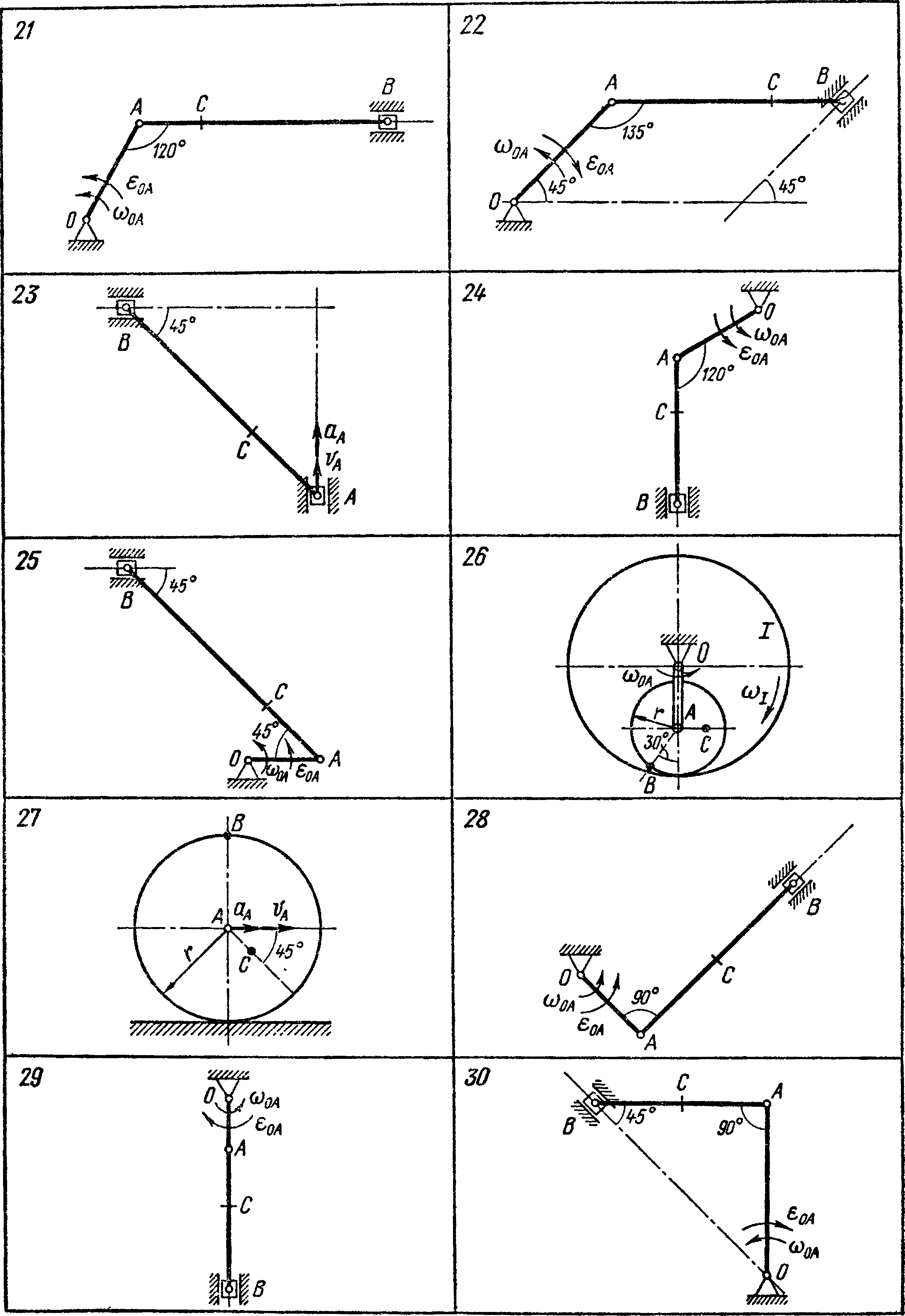
Найти для заданного положения механизма скорости и ускорения точек В и С, а также угловую скорость и угловое ускорение звена, которому эти точки принадлежат. Необходимые для расчета исходные данные приведены в таблице 5, а схемы механизмов приведены в таблице 6.
Таблица 5 – Исходные данные к заданию К.3
|
Вариант
|
Размеры, см
|
OA, рад/с |
1, рад/с |
OA, рад/с2 |
А, см/с |
аА, см/с2 | |||
|
OA |
r |
AB |
AC | ||||||
|
1 |
40 |
13 |
– |
9 |
2 |
– |
3 |
– |
– |
|
2 |
30 |
13 |
– |
9 |
3 |
– |
3 |
– |
– |
|
3 |
– |
45 |
– |
– |
– |
– |
– |
50 |
100 |
|
4 |
35 |
– |
– |
40 |
4 |
– |
7 |
– |
– |
|
5 |
25 |
– |
– |
15 |
1 |
– |
2 |
– |
– |
|
6 |
40 |
20 |
– |
8 |
1 |
1,5 |
0 |
– |
– |
|
7 |
35 |
– |
75 |
55 |
5 |
– |
8 |
– |
– |
|
8 |
– |
– |
20 |
12 |
– |
– |
– |
40 |
20 |
|
9 |
– |
– |
45 |
25 |
– |
– |
– |
20 |
10 |
|
10 |
25 |
– |
80 |
15 |
1 |
– |
3 |
– |
– |
|
11 |
– |
– |
30 |
20 |
– |
– |
– |
10 |
0 |
|
12 |
– |
– |
30 |
18 |
– |
– |
– |
20 |
20 |
|
13 |
25 |
– |
55 |
45 |
2 |
– |
5 |
– |
– |
|
14 |
45 |
20 |
– |
9 |
3 |
10 |
0 |
– |
– |
|
15 |
40 |
20 |
– |
9 |
1 |
– |
2 |
– |
– |
|
16 |
55 |
15 |
– |
– |
2 |
– |
4 |
– |
– |
|
17 |
– |
35 |
– |
15 |
– |
– |
– |
80 |
50 |
|
18 |
10 |
– |
10 |
7 |
2 |
– |
5 |
– |
– |
|
19 |
20 |
13 |
– |
8 |
1 |
2 |
0 |
– |
– |
|
20 |
– |
– |
20 |
7 |
– |
– |
– |
10 |
15 |
|
21 |
30 |
– |
60 |
20 |
3 |
– |
7 |
– |
– |
|
22 |
35 |
– |
60 |
35 |
4 |
– |
8 |
– |
– |
|
23 |
– |
– |
60 |
15 |
– |
– |
– |
5 |
10 |
|
24 |
25 |
– |
35 |
10 |
2 |
– |
2 |
– |
– |
|
25 |
20 |
– |
70 |
25 |
1 |
– |
3 |
– |
– |
|
26 |
20 |
13 |
– |
8 |
2 |
1 |
0 |
– |
– |
|
27 |
– |
13 |
– |
8 |
– |
– |
– |
60 |
30 |
|
28 |
20 |
– |
50 |
20 |
1 |
– |
2 |
– |
– |
|
29 |
12 |
– |
35 |
10 |
4 |
– |
5 |
– |
– |
|
30 |
40 |
– |
– |
15 |
5 |
– |
8 |
– |
– |
|
Примечание – OA и OA – угловая скорость и угловое ускорение кривошипа ОА при заданном положении механизма; 1 – угловая скорость колеса I (постоянная); А и аА – скорость и ускорение точки А. Качение колес происходит без скольжения | |||||||||
Таблица 6 – Схемы механизмов к заданию К.3

Продолжение таблицы 6
Продолжение таблицы 6
Пример выполнения задания.
Даны схема механизма в заданном положении (рисунок 3а) и следующие исходные данные: ОА = АВ = 30 см; АС = 15 см; OA = 4 рад/с; OA = 8 рад/с2.
Решение.
1. Определение скоростей точек и угловой скорости звена (рисунок 3б). Вычислим модуль скорости точки А кривошипа ОА в заданном положении. Так как кривошип испытывает вращательное движение вокруг неподвижной точки О, то
![]() см/с.
см/с.

Рисунок 3 – Схема механизма (а) и схема для определения скоростей (б)
Вследствие вращения кривошипа вектор скорости точки А перпендикулярен кривошипу и направлен в соответствии с OA. Вектор скорости точки В ползуна направлен вдоль прямой ОВ. Зная скорость точки А и направление скорости точки В (принадлежащих звену АВ), можно определить мгновенный центр скоростей РАВ шатуна АВ. Он находится в точке пересечения перпендикуляров, восстановленных из точек А и В по отношению к направлениям их скоростей.
Модули скоростей точек В и С определятся соответственно:
![]() ;
;
![]() .
(1)
.
(1)
Угловую скорость звена АВ можно определить как
![]() .
(2)
.
(2)
Подставив выражение для AВ в уравнения (1), получим:
![]() ;
;
![]() .
(3)
.
(3)
Расстояния APAB, BPAB и CPAB определяются из рассмотрения треугольников АBPAB и АCPAB:
![]() см;
см;
![]() см;
см;
![]() см.
см.
С учетом этого
![]() рад/с;
рад/с;
![]() см/с;
см/с;
![]() см/с.
см/с.
Вектор скорости точки С направлен перпендикулярно отрезку CPAB в направлении вращения звена АВ.
Скорости точек В и С можно установить и с использованием теоремы об алгебраическом равенстве проекций скоростей точек на ось, проведенную через эти точки.
В качестве прямой возьмем направление шатуна АВ. Тогда
![]() .
.
Из
рисунка 3б
видно:
![]() ,
откуда через известную
,
откуда через известную ![]() А
определяем неизвестные
А
определяем неизвестные ![]() В
и
В
и ![]() С:
С:
![]() см/с
и
см/с
и
![]() см/с.
см/с.
2. Определение
ускорений точек и углового ускорения
звена
(рисунок 4). Ускорение
![]() точки
А
складывается из вращательного
точки
А
складывается из вращательного
![]() и центростремительного
и центростремительного
![]() ускорений:
ускорений:
![]() ;
;
![]() ;
;
![]() .
.
Согласно теореме об ускорениях точек плоской фигуры для ускорения точки В имеем
![]() ,
(4)
,
(4)
где
![]() и
и
![]() – вращательная и центростремительная
составляющие ускорения точки В
во вращательном движении шатуна АВ
вокруг полюса А;
– вращательная и центростремительная
составляющие ускорения точки В
во вращательном движении шатуна АВ
вокруг полюса А;
![]() .
.

Рисунок 4 – Схемы для определения ускорений
С учетом имеющихся данных определяем модули составляющих ускорений:
![]() см/с2;
см/с2;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Вектор
![]() направлен к центру вращения: от А
к О.
Вектор
направлен к центру вращения: от А
к О.
Вектор
![]() перпендикулярен
перпендикулярен
![]() и направлен с учетом направления
и направлен с учетом направления
![]() .
Составляющая
.
Составляющая
![]() направлена от В
к полюсу А.
направлена от В
к полюсу А.
Для
ускорения
![]() точки В
и его вращательной составляющей
точки В
и его вращательной составляющей
![]() известны только линии действия этих
векторов:
известны только линии действия этих
векторов:
![]() направлен вдоль линии движения ползуна
ОВ;
направлен вдоль линии движения ползуна
ОВ;
![]() – перпендикулярно АВ.
– перпендикулярно АВ.
Зададимся произвольно их направлениями (пунктирные стрелки на рисунке 4). Определим эти ускорения из уравнений проекций векторного равенства (4) на координатные оси. Знак в ответе должен показать соответствие истинного направления вектора направлению, принятому в расчете.
Выберем направление осей х и у, как показано на рисунке 4, и составим уравнения проекций:
![]() ,
(5)
,
(5)
![]() .
(6)
.
(6)
Из
уравнения (6) найдем
![]() см/с2.
Истинное
направление ускорения
см/с2.
Истинное
направление ускорения
![]() совпадает с ускорением, построенным на
рисунке 4.
совпадает с ускорением, построенным на
рисунке 4.
Из
уравнения (5) получим
![]() см/с2,
то есть действительное направление
см/с2,
то есть действительное направление
![]() противоположно показанному на рисунке 4.
противоположно показанному на рисунке 4.
Теперь
определяем угловое ускорение звена АВ:
![]() рад/с2.
рад/с2.
Направление
углового ускорения АВ
определяется направлением вращательного
ускорения
![]() .
.
Далее определяем ускорение точки С. Согласно теореме об ускорениях точек плоской фигуры:
![]() ;
;
![]() ;
;
![]() .
.
Модули вращательного и центростремительного ускорения точки С во вращательном движении АВ вокруг полюса А соответственно:
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Направления
![]() и
и
![]() показаны на рисунке 2.
показаны на рисунке 2.
Ускорение точки С находим способом проекций (см. рисунок 4):
![]() см/с2;
см/с2;
![]() см/с2;
см/с2;
![]() см/с2.
см/с2.
Векторы
ускорений
![]() и
и
![]() точек
В
и С
соответственно показаны на рисунке 4.
точек
В
и С
соответственно показаны на рисунке 4.