

Вопрос 40
Если в техническом задании условиями метрического синтеза кулачкового механизма закон движения выходного звена не задан, то его необходимо
самостоятельно выбрать из набора типовых законов движения, которые делятся на три группы:
законы безударные (рис. 9.14);
законы с жесткими ударами (рис. 9.15);
законы с мягкими ударами (рис. 9.16).
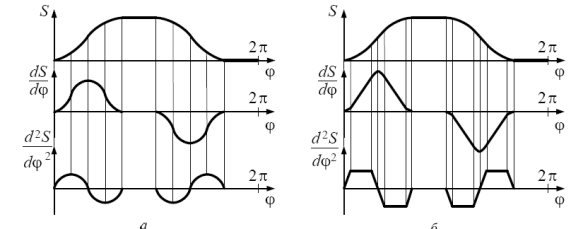
Основными представителями безударных законов движения выходных
звеньев являются: синусоидальный (рис. 9.14, а) и трапецеидальный законы
движения (рис. 9.14, б). Оба закона обеспечивают плавную работу механизма, однако имеют существенный недостаток, выражающийся в медленномнарастании перемещения выходного звена, сопровождаемого большими значениями ускорений.
Безударные законы движения выходных звеньев являются предпочтительными с точки зрения восприятия звеньями кулачковых механизмов силовых факторов. Кулачки, реализованные по безударным законам движения,имеют конструктивные профиля более сложной конфигурации, изготовление которых технологически сложно, т. к. требует применения высокоточного оборудования, поэтому их изготовление существенно дороже. Кулачковые механизмы с безударными законами выходных звеньев целесообразно применять при высоких скоростях и жестких требованиях к точности и долговечности.


Основными представителями законов движения выходных звеньев с же-
сткими ударами являются: линейный (рис. 9.15, а) и линейный с переходными
кривыми (рис. 9.15, б). Для законов с жесткими ударами характерно наличие в начале и конце фаз удаления и сближения точек, имеющих значения ускорений,теоретически равных бесконечности, что вызывает в зоне контакта звеньев кулачкового механизма появление сил инерции, также равных бесконечности.
Данное явление свидетельствует о возникновении соударения рабочих поверхностей контактирующих звеньев. Законы с жесткими ударами имеют ограниченное применение и используются в неответственных механизмах, работающих при низких скоростях движения и невысокой долговечности.
Для обеспечения качественных показателей кулачкового механизма наиболее предпочтительными являются законы движения выходных звеньев с мягкими ударами. К подобным законам относятся: равноускоренный(рис.9.16,а),
косинусоидальный (рис. 9.16, б), линейно-убывающий (рис. 9.16, в) и линейновозрастающий (рис. 9.16, г).
Вопросы 42, 43
Рассмотрим графический метод получения профиля кулачка как задачу кинематического синтеза. В этом случае заданы схема кулачкового механизма, закон движения толкателя и rmin кулачка. Профилирование осуществляется на основе закона движения толкателя. В качестве примера рассмотрим профилирование кулачка в осевом механизме с поступательно движущимся толкателем. При этом дана схема механизма, диаграмма движения толкателя и rmin кулачка (рис. 54).

рис. 54
В
начале размечаются основные размеры
механизма в масштабе
![]() ,
а также фазовые углы, причём углы
,
а также фазовые углы, причём углы![]() делятся
на ряд равных частей в соответствии с
диаграммой (рис. 54, б). Строятся начальное,
а затем ряд последующих положений
толкателя в обращённом движении (рис.
55, а), и полученные точки соединяются
плавной кривой. В случае построения
профиля кулачка для механизма с роликовым
толкателем сначала строится эквидистанта
(центровой профиль) как и в предыдущем
случае, а затем и сам рабочий профиль
кулачка, отстоящий от эквидистанты на
величину радиуса роликаrрол
(рис. 55, б).
делятся
на ряд равных частей в соответствии с
диаграммой (рис. 54, б). Строятся начальное,
а затем ряд последующих положений
толкателя в обращённом движении (рис.
55, а), и полученные точки соединяются
плавной кривой. В случае построения
профиля кулачка для механизма с роликовым
толкателем сначала строится эквидистанта
(центровой профиль) как и в предыдущем
случае, а затем и сам рабочий профиль
кулачка, отстоящий от эквидистанты на
величину радиуса роликаrрол
(рис. 55, б).

рис. 55
Величина
rрол
выбирается из соотношения:
![]()
где ρmin – минимальный радиус центрового профиля кулачка, который можно определить графически по трём точкам в месте наибольшей кривизны эквидистанты (рис. 55, б).
Профилирование кулачка механизма с коромысловым толкателем состоит из аналогичных операций, т. е. после разметки межцетровых расстояний строится ряд положений коромысла в обращённом движении (рис. 56) в соответствии с заданной диаграммой S(φ), часть которой показана на рис. 56, б.

рис. 56