

Teoreticheskaya_mehanika._Kinematikastatika._Uch._metod._posobie
.pdf71
Рис. 2.34
Содержание контрольных работ для студентов на тему «плоское движение твердого тела» дано в приложении (контрольная работа 2, задачи 1 и
2).
Пример 2.7.
Исходные данные: кривошип ОА длиной 60 см вращается ускоренно относительно оси О и приводит в движение ролик 1 радиусом r1 20 см, ко-
торый катится без скольжения по неподвижному колесу 2 (рис. 2.35). Пара-
метры вращения кривошипа в данный момент |
времени |
2 с-1, |
|
|
|
|
ОА |
|
1 с-2. |
|
|
|
ОА |
|
|
|
Требуется: определить угловую скорость 1 |
и угловое ускорение 1 |
|
ролика, вычислить скорость и ускорение точки В, находящейся на ролике на расстоянии 10 см от точки А.
Рис. 2.35

72
Решение. Кривошип ОА совершает вращательное движение относительно оси, проходящей через неподвижный центр О. Скорость и ускорение точки А кривошипа вычисляют по формулам:
VА ОА ОА 2 60 120 см/с;
a A a A a An .
Подвижный ролик движется плоскопараллельно. Вычислим 1 и 1
подвижного ролика. Плоское движение ролика можно привести к мгновенновращательному движению относительно мгновенного центра скоростей (МЦС), этим центром является точка касания Р (рис. 2.36).
Запишем уравнение связи между движениями кривошипа и ролика. Точка А одновременно принадлежит кривошипу ОА и ролику 1. Следовательно, перемещение точки А:
S |
|
|
|
OA AP , т. е. |
|
|
ОА |
. |
A |
OA |
|
||||||
|
|
1 |
1 |
ОА АP |
||||
|
|
|
|
|||||
Рис. 2.36
Угловая скорость и угловое ускорение ролика 1 тогда вычисляются:
|
|
|
|
ОА |
|
|
ОА |
ОА |
|
|
ОА |
ОА |
|
2 60 |
6 с-1; |
|||||||||||||
|
|
АP |
|
|
|
АP |
|
|
|
r |
20 |
|
|
|
||||||||||||||
1 |
|
|
1 |
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОА |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
ОА |
|
|
ОА |
|
|
ОА |
ОА |
|
1 60 |
3 |
с-2. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
АP |
|
|
АP |
|
r1 |
|
20 |
|
|||||||||||||||||||
1 |
|
1 |
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

73
Угол вращения ролика относительно точки Р (точка МЦС) совпадает с углом вращения кривошипа (рис. 2.36). Направления вращения 1 и 1 ро-
лика 1 совпадают, отмечаем их дуговыми стрелками; следовательно, движение ролика 1 является ускоренным, как и кривошипа ОА.
Скорость точки В.
Точка В находится на ролике 1, следовательно, еѐ скорость определяется как скорость точки, вращающейся вокруг МЦС, т. е. точки Р:
VВ 1 ВР .
Из геометрии задачи определим по теореме косинусов расстояние ВР:
ВР 
 ( АР)2 ( АВ)2 2 ( АР) ( АВ) cos135
( АР)2 ( АВ)2 2 ( АР) ( АВ) cos135

 202 102 2 20 10 ( 0,707)
202 102 2 20 10 ( 0,707) 
 782,8 27,98 28 см.
782,8 27,98 28 см.
Тогда скорость точки В:
VВ 1 ВР 6 28 168 см/с.
Вектор V В перпендикулярен отрезку ВР и направлен в сторону враще-
ния 1 ролика (рис. 2.36).
1. Ускорение точки В.
а |
б |
Рис. 2.37

74
Ускорение точки В складывается из ускорения полюса и ускорения точки В при еѐ вращении вместе с роликом вокруг этого полюса. За полюс примем точку А, т. к. еѐ ускорение известно.
Тогда ускорение точки В запишется (рис. 2.37, а)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
n |
|
|
. |
||||
|
|
|
а |
В |
а |
A |
а |
В( A) |
а |
а |
a |
a |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
A |
|
A |
|
|
В( A) |
|
|
В( A) |
|||||||||
Здесь: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a An OA2 |
OA 4 60 240 см/с2 |
нормальная составляющая ускорения |
||||||||||||||||||||||||||
полюса, направлена от точки А к центру О; |
|
|
|
|
|
|
|
|
||||||||||||||||||||
а |
|
ОА 1 60 60 см/с2 касательная составляющая ускорения |
||||||||||||||||||||||||||
A |
|
ОА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полюса, направлена перпендикулярно |
|
n |
|
|
|
|||||||||||||||||||||||
а |
в сторону углового ускорения кри- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
вошипа ОА ОА ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a |
|
АВ 3 10 30 см/с2 |
ускорения точки В при еѐ вращении |
|||||||||||||||||||||||||
В( A) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
относительно полюса А; |
вектор |
a |
|
|
перпендикулярен АВ и направлен в |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
В( A) |
|
|
|
|
|
|
|
|
|
|
||||||
сторону дуговой стрелки 1 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
an |
|
2 AB 62 |
10 360 см/с2, |
вектор |
|
n |
|
|
||||||||||||||||||||
|
a |
|
направлен по отрезку |
|||||||||||||||||||||||||
В( A) |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В( A) |
||||
АВ от точки В к точке А.
Выражение для расчета ускорения точки В записано в векторной форме. Для аналитических вычислений необходимо спроецировать это векторное равенство на две оси координат, тогда теорема примет вид
|
а |
B |
а |
|
а n |
a n |
a |
a |
a |
, |
где |
|
|
|
A |
A |
B( A) |
B( A) |
Bx |
By |
|
||
|
|
|
|
|
|
|
|||||
a |
aix |
a An aB( A) cos 45 |
aBn ( A) sin 45 |
240 30 0,707 360 0,707 |
|||||||
|
Bx |
|
|
|
|
|
|
|
|
|
|
|
= – 473,31 см/с2; |
|
|
|
|
|
|||||
a |
aiy |
a A aB( A) cos45 |
aBn ( A) sin 45 |
60 30 0,707 360 0,707 |
|||||||
|
By |
|
|
|
|
|
|
|
|
|
|
= 335,73 см/с2.

75
Модуль ускорения точки В вычислим по формуле:
aB 
 (a Bx )2 (a By ) 2
(a Bx )2 (a By ) 2 
 ( 473,31) 2 (335,73) 2 580,29 см/с2.
( 473,31) 2 (335,73) 2 580,29 см/с2.
Для определения направления вектора полного ускорения точки В строится параллелограмм на его проекциях a Bx и a By , диагональ этого па-
раллелограмма и будет вектором ускорения точки В.
Ответ: |
6 с-1, |
|
3 с-2; V |
В |
168 |
см/с; |
а |
580,3 см/с2. |
1 |
|
|
1 |
|
|
|
В |
|
|
|
|
|
|
|
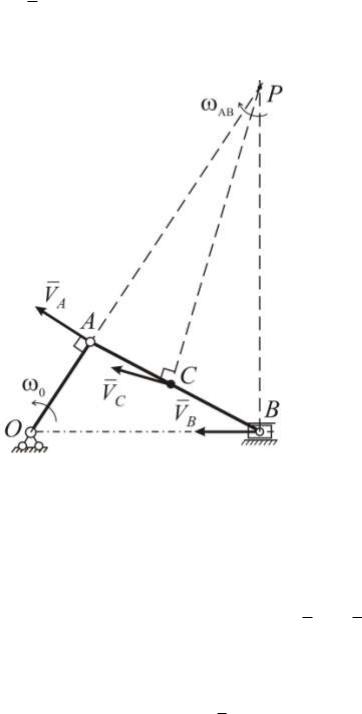
Пример 2.8.
В кривошипно-шатунном механизме кривошип ОА вращается замедленно относительно центра О с угловой скоростью 0 и угловым ускорени-
ем 0 (рис. 2.38) и приводит в движение шатун АВ.
Рис. 2.38
Исходные данные: ОА = 35 см; АС = 40 см; 0 = 4 с-1; 0 = 8 с-2;
(ОАВ) = 900.
Для заданного положения механизма вычислить:
1.скорости точек А, В, С и угловую скорость шатуна АВ;
2.ускорения точек А, В, С и угловое ускорение шатуна АВ.
Решение
В кривошипно-шатунном механизме кривошип ОА вращается относительно центра О, шатун АВ движется плоскопараллельно, ползун В движется поступательно.
1. Скорости точек и угловая скорость шатуна.
76
Точка А одновременно принадлежит и кривошипу ОА, и шатуну АВ. Рассматривая вращение кривошипа, скорость точки А рассчитываем по формуле
VA 0 OA 4 35 140 см/с.
Вектор скорости V A перпендикулярен кривошипу ОА и направлен в сторону угловой скорости кривошипа (рис. 2.39).
Рис. 2.39
Рассмотрим движение шатуна АВ. Заменим плоское движение шатуна АВ мгновенно-вращательным относительно мгновенного центра скоростей (МЦС). Вектор скорости точки В шатуна направлен вдоль направляющих ползуна, в данном случае по горизонтали. Для нахождения МЦС восстановим перпендикуляры к построенным векторам скоростей V A и VB , на их пересечении будет находиться МЦС шатуна точка Р (рис. 2.39).
Направление мгновенного вращения шатуна АВ вокруг МЦС AB
определяем по направлению вращения вектора V A относительно точки Р. Величина угловой скорости шатуна и скорости точек рассчитывается
из выражения:

77
AB VAPA VBPB CPVC .
Если положение кривошипно-шатунного механизма фиксировано и начерчено в масштабе, то расстояния ВР и СР измеряются с чертежа линейкой. В общем случае рассматривают геометрию задачи (рис. 2.39).
Рассмотрим треугольники ОАВ и ОРВ:
из ОАВ
AB OA tg600 35 
 3 60,6 см;
3 60,6 см;
из ОАВ
PA AB tg600 OA tg 2 600 35 (
 3)2 105 см,
3)2 105 см,
PC 
 AP 2 AC 2
AP 2 AC 2 
 OA2 tg 4 (60 0 ) AC 2
OA2 tg 4 (60 0 ) AC 2
|
352 ( |
|
|
|
|
|||
|
|
3) 4 40 2 112, 4 см. |
||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
VA |
|
140 |
1,33 с-1; |
||
AB |
|
|
||||||
|
|
PA |
105 |
|
||||
|
|
|
|
|||||
VC AB PC 1,33 112,4 149,5 см/с.
Вектор скорости VC перпендикулярен отрезку РС и направлен в сторону мгновенного вращения шатуна AB (рис. 2.39).
Скорость точки В можно вычислить из выражения VB AB PB (для этого надо определить РВ), или удобнее воспользоваться первым следствием теоремы о скорости точки плоской фигуры: проекции скоростей точек А и В на прямую (АВ) равны:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
A |
cos00 V |
B |
cos300 |
, |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
cos 00 |
|
|
1 |
|
|
|
|
|
|
|
|
|||||||
тогда VB |
|
V |
A |
|
140 |
|
280 |
3 |
161,7 см/с. |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
0 |
|
|
|
|
|
|
|
3 |
|
|
|
||||||||
cos30 |
|
3 |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
2. Ускорения точек и угловое ускорение шатуна.
Определим ускорение точки А. Так как движение кривошипа ОА вращательное, то

78
а A а A а nA
a A 0 OA 8 35 280 см/с2; a An 02 OA 42 35 560 см/с2;
a A 
 a A 2 a An 2
a A 2 a An 2 
 2802 5602 626,1см/с2.
2802 5602 626,1см/с2.
Рассчитываем ускорение точки В ползуна. Для этого рассмотрим еѐ в движении с шатуном АВ. Так как ускорение точки А уже найдено, то принимаем точку А за полюс, тогда по теореме
|
|
|
|
|
аB а A аB( A) , |
|
|
|
|||
или |
а |
а |
a n |
a |
|
а |
а n |
a n |
a |
, |
|
|
В |
A |
В( A) |
|
В( A) |
A |
A |
В( A) |
В( A) |
|
|
здесь (рис. 2.40, а): вектор |
|
n |
|
||||||||
a |
направлен по шатуну АВ от точки В к точке |
||||||||||
|
|
|
|
|
В( A) |
|
|
|
|
|
|
А; вектор |
a |
располагаем перпендикулярно шатуну АВ (направление вы- |
|||||||||
|
В( A) |
|
|
|
|
|
|
|
|
|
|
бираем произвольно, т. к. направление АВ пока неизвестно): aBn( A) AB2 AB 1,332 60,6 107, 2 см/с2,
aB( A) AB AB .
Прикладываем векторы а A , а An , a В( A) , a Вn( A) к точке В (рис. 2.40, б).
а |
б |
Рис. 2.40
79
Ускорение точки В определяется векторным уравнением:
|
|
|
|
а а a n |
a |
а |
а n |
a n |
a . |
(а) |
||
|
|
|
|
В |
A |
В( A) |
В( A) |
A |
A |
В( A) |
В( A) |
|
|
|
Таким образом, получили векторное равенство с двумя неизвестными: |
||||||||||
а |
В |
и a |
|
АВ . |
|
|
|
|
|
|
|
|
|
В( A) |
|
АВ |
|
|
|
|
|
|
|
|
|
|
|
Вычислить а В |
и |
можно двумя способами аналитическим и гео- |
||||||||
АВ
метрическим. Рассмотрим каждый из указанных способов.
Аналитический способ. Начало декартовой системы координат совместим с точкой В, одну из осей выбираем перпендикулярно одной из неизвестных, например, ось Вy перпендикулярна оси направляющих ползуна (т. е.aB ), тогда ось Вx – вдоль направляющих ползуна (рис. 2.40, б). Вектор ус-
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
корения ползуна а В |
направлен вдоль оси Вx , поэтому проекция вектора а В |
|||||||||||||||||||||||||||||||||||
на ось Вy равна нулю. Из (а) получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
y 0 a |
sin 30 |
|
|
a n cos 30 |
a n |
|
|
|
sin 30 a |
|
cos30 ; |
|||||||||||||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
A |
|
|
|
|
B( A) |
|
|
|
|
|
|
B( A) |
|
|
|
|
|
||||||||
|
|
|
|
|
a n |
|
cos 30 |
a |
sin 30 |
|
|
a n |
sin 30 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
B( A) |
|
|
|
|
|
|
|
|||||
|
|
aB( A) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos30 |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
560 |
|
|
3 |
280 |
1 |
107, 2 |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
2 |
659,8 см/с2; |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
x a |
B |
a |
cos 30 |
|
a n sin |
30 a n |
|
|
|
|
cos30 |
a |
|
sin 30 |
||||||||||||||||||||||
|
|
A |
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
B( A) |
|
|
|
B( A) |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
aB 280 |
3 |
|
560 |
1 |
107,2 |
|
3 |
|
659,8 |
1 |
199,5 см/с2. |
|||||||||||||||||||||||||
2 |
|
|
|
2 |
|
2 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Знаки (+) у aB( A) рис. 2.40, верны.
Вычисляем угловое ускорение шатуна:

80
AB aABAB 659,860,6 10,9 с-2,
направление AB определяется вращением вектора aB( A) относительно по-
люса А, т. е. получаем против хода часовой стрелки (рис. 2.40, а).
Вычислим ускорение точки С (рис. 2.41). По теореме ускорение точки С:
|
|
|
|
|
|
|
|
n |
|
n |
|
|
|
|
|
|
а |
С |
а |
а |
a |
a |
, |
(б) |
|||||||||
|
|
|
|
A |
|
|
|
A |
|
С ( A) |
|
|
С ( A) |
|
|
|
здесь (рис. 2.41, а): вектор aCn( A) |
направлен по шатуну АВ от точки С к точке |
|||||||||||||||
А; вектор aC ( A) перпендикулярно шатуну АВ по найденному направлению АВ
вокруг полюса А.
aCn( A) AB2 AC 1,332 40 70,8 (см/с2), aC ( A) AB AC 10,9 40 436 (см/с2).
Сводим вектора a A , a An , aC ( A) , aCn( A) в точку С (рис. 2.41 б).
а |
б |
Рис. 1.41