

5.1.2 Расчет электромеханических характеристик.
Расчет электромеханических характеристик f=I2(s) ведется по следующим формулам [1]:

(29)


(31)
Таблица расчета естественной електромемеханической характеристики f=I2(s) в среде MathCAD показана на рисунке 7, график – на рисунке 8.


Рисунок 7 – Расчет естественной електромеханической характеристики f=I2(s).
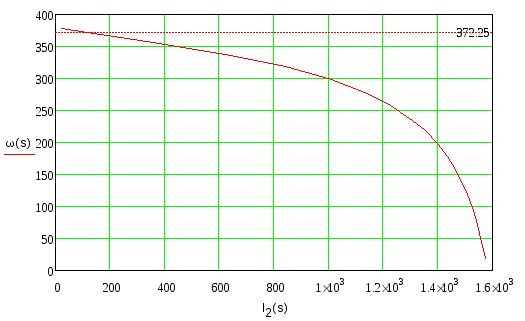
Рисунок 8 – График естественной електромеханической характеристики f=I2(s).
Расчет электромеханических характеристик f=I1(s) ведется по следующим формулам [1]:

(32)


(34)
Таблица расчета естественной електромемеханической характеристики f=I1(s) в среде MathCAD показана на рисунке 9, график – на рисунке 10.


Рисунок 9 – Расчет естественной електромеханической характеристики f=I1(s).

Рисунок 10 – График естественной електромеханической характеристики f=I1(s).
5.2 Расчет искусственных характеристик эп.
Для получения искусственных характеристик используем закон вольт-частотного управления (з-н Костенко):

(35)
Подробный расчет в среде MathCadпредставлен в приложении Б.
5.2.1 Расчет искусственных механических характеристик эп.
Искусственные механические характеристики ЭП при скорости стола вхождения резца в металл, прямой скорости строгания и обратной скорости хода стола представлены на
рисунке 11.

Рисунок 11 – График искусственной механической характеристики f=M(s).
5.2.2 Расчет искусственных электромеханических характеристик эп.
Искусственные електромеханические характеристики ЭП f=I2(s) при скорости стола вхождения резца в металл, прямой скорости строгания и обратной скорости хода стола представлены на рисунке 12.

Рисунок 12 – График искусственной электромеханической характеристики f=I2(s).
Искусственные електромеханические характеристики ЭП f=I1(s) при скорости стола вхождения резца в металл, прямой скорости строгания и обратной скорости хода стола представлены на рисунке 13.

Рисунок 13 – График искусственной электромеханической характеристики f=I1(s).
6 Расчет переходных процессов в электроприводе за цикл работы
6.1 Обоснование использования расчетной схемы
Механическая часть привода состоит из двух масс, связанных упругим элементом – муфтой. Первая инерционная масса включает из момента инерции ротора двигателя и полумуфты:
J1=Jдв+Jм (36)
J1=0.0091+0.2=0.3 (кг·м2)
Вторая инерционная масса состоит из инерционных масс полумуфты Jм, приведенной стола с заготовкойJст.пр, приведенных моментов инерции соединительных валов и редуктораJред(принимаются равными 25% от приведенного момента инерции стола с заготовкой):
J2=Jм+Jст.пр+Jред (37)
Момент инерции стола с заготовкой
Jст.пр=(Gст+Gдет)·ρ2 / g (38)
Jст.пр=(40000+66000)·(0,0055)2/ 9,81=0,334(кг·м2)
Момент инерции редуктора
Jред=0,25·Jст.пр (39)
Jред=0,25·0,39 = 0,083 (кг·м2)
Тогда J2=0.0091+0,334+0,083=0,426 (кг·м2)
Так как величина упругости муфты достаточна велика Супр=1.45·107, а остальная часть имеет жесткую механическая связь, то не смотря на соизмеримость двух маховых масс, возможно использовать одномассовую расчетную схему.