

suep_metod_sem2 / suep_metod_sem2 / 5.2 - Электропривод по схеме ТПН-АД
.pdfУправление асинхронным двигателем с помощью тиристорного преобразователя напряжения
Тиристорный преобразователь напряжения как объект регулирования Тиристорный преобразователь напряжения (ТПН) предназначен для пре-
образования напряжения, неизменного по амплитуде и частоте, в напряжение, регулируемое по амплитуде, а также для двухфазного выпрямления напряжения питающей сети. Используется в системах асинхронного ЭП в основном для реализации схем плавного пуска АД и динамического тороможения, реже – при построении САР скорости.
Наиболее распространенная схема реверсивного ТПН представлена на рис.5.6. Для вращения двигателя в одном направлении отпирающие импульсы
|
|
|
|
|
~ |
|
|
подаются |
на |
тиристоры |
||
|
|
|
|
|
|
|
Т1…Т6, для вращения в обрат- |
|||||
|
|
|
|
А1 |
|
В1 |
|
С1 |
ном направлении – на тиристо- |
|||
|
|
|
|
|
|
|
|
|
ры Т5…Т10. В ЭП механизмов, |
|||
|
С |
Т1 |
Т2 Т3 |
Т4 Т5 |
Т6 |
не требующих частого ревер- |
||||||
|
сирования, изменение направ- |
|||||||||||
Uу |
И |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
ления вращения АД может дос- |
||||||
|
Ф |
|
Т7 |
Т8 |
Т9 |
Т10 |
|
тигаться за счет использования |
||||
|
|
|
реверсивного контактора в ста- |
|||||||||
|
У |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
торной цепи вместо дополни- |
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
тельных |
групп |
тиристоров |
|
|
Uсм |
|
|
|
|
|
|
Т7…Т10. |
|
|
|
|
|
|
|
|
А2 |
|
В2 |
|
С2 |
Принцип |
работы |
ТПН |
|
|
|
|
|
|
|
основан на регулировании дей- |
||||||
|
|
|
|
|
|
|
|
|
ствующего |
значения |
первой |
|
|
|
|
|
|
M |
|
|
гармоники напряжения US на |
||||
|
|
|
|
|
|
|
статоре АД за счет изменения |
|||||
|
|
|
|
|
|
|
|
|
угла регулирования , относи- |
|||
|
Рис.5.6. Силовая схема реверсивногоТПН, |
тельно фазного |
напряжения |
|||||||||
питающегоасинхронный двигатель. |
питающей сети – так наз. фазо- |
|
вое управление, при котором к |
||
|
АД подводятся участки синусоидального напряжения сети. Введение в СИФУ напряжения смещения Uсм задает угол регулирования max , при котором
обеспечивается минимальное выходное напряжение ТПН и соответствующий момент трогания АД.
Наличие активно-индуктивной нагрузки, какой является и АД, обеспечивает отставание по фазе тока от напряжения на угол , зависящий от параметров нагрузки (АД). Такой ток (іН на рис.5.7) будет протекать в двигателе и при питании от ТПН, если обеспечить открывание тиристоров точно в моменты времени, соответствующие min . При этом угол проводимости тири-
сторов максимален ( ), и к двигателю подводится напряжение, максимальное по среднему значению за полупериод UScp.max 2UC. max  .
.
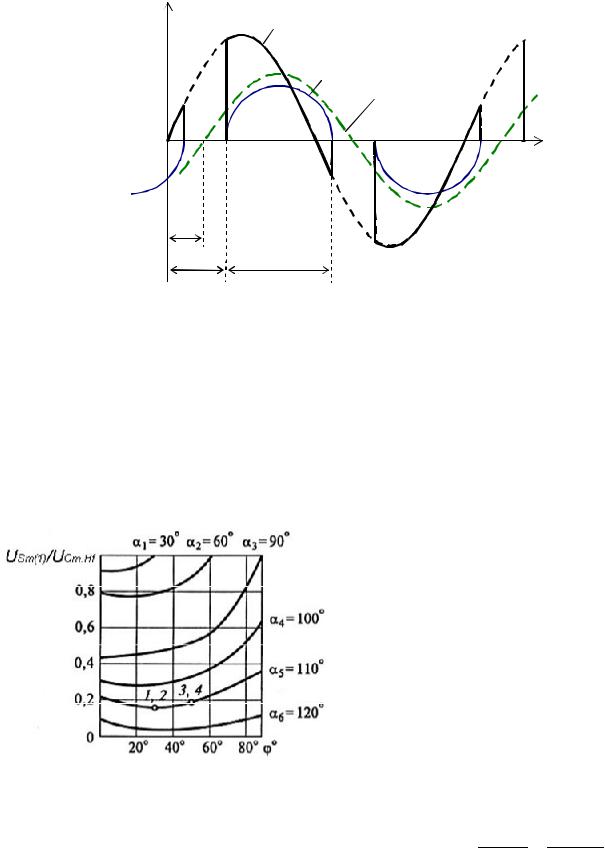
u, i
uвых
uC
iвых
iн
t
0
Рис.5.7. Графики изменения напряжений и токов для одной фазы ТПН.
При увеличении угла от значения min до значения max угол
проводимости будет уменьшаться от до нуля, а среднее за полупериод напряжение двигателя – от UScp. max до нуля. При этом ток нагрузки івых имеет
прерывистый характер (рис.5.7), а возникающие пульсации токов высших гармоник существенно снижают к.п.д. ТПН.
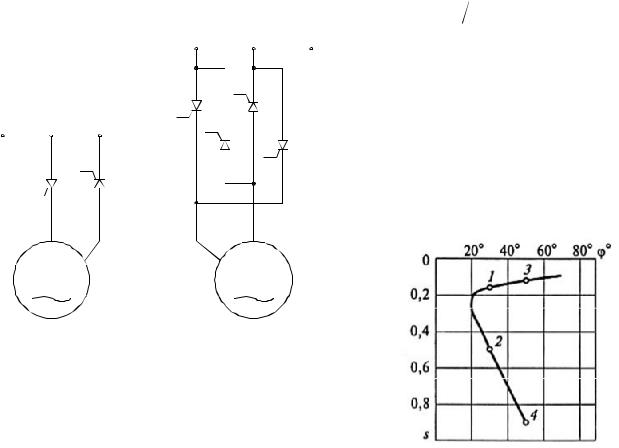
В общем случае отношение амплитуды 1-й гармоники напряжения нагрузки USm(1) к амплитуде номинального фазного напряжения сети UCm.Hf яв-
ляется функцией переменных и (рис.5.8).
Рис.5.8. Зависимости выходного напряжения ТПН от углов регулированияи нагрузки .
Реализация режима динамического торможения возможна при использовании специального блока логики управления тиристорами ТПН, причем возможна реализация одноили двуполупериводного выпрямления (рис.5.9), когда в двух фазах двигателя работают два или четыре тиристора соответственно. Вторая схема (рис.5.9б), применяемая в реверсивных ТПН, является более эффективной.
Как динамический объект ТПН может быть представлен инерционным звеном с ПФ:
W |
p |
U |
S |
p |
|
k |
, |
ТПН |
U y p |
|
T p 1 |
|
|||
|
|
|
|
||||
причем постоянная времени T определяется инерционностью СИФУ ТСИФУ, а также максимальным временем запаздывания з , которое для схемы ТПН, представленной на рис.5.6, составляет з 0,033 с [Терехов, Осипов]. Тогда
|
T ТСИФУ з . |
|
|
А1 |
~В1 С1 |
~ |
Т1 |
Т4 |
А1 В1 |
С1 |
Т8 Т9 |
|
|
|
Т3 |
Т6 |
|
Коэффициент |
передачи |
k dUSm(1) dU y |
является функ- |
цией углов и (см. рис.5.8), последний из которых является, в свою очередь, функцией скольжения двигателя s (рис.5.10). Линеаризация регулировочной характеристики ТПН возможна только в ограниченном диапазоне изменения углов и , тогда можно счи-
тать, что k USmH  U y.H const .
U y.H const .
M |
M |
а) |
б) |
Рис.5.9. Схемы реализации динамического торможения при питании от ТПН.
Рис.5.10. Зависимость угла нагрузки от скольжения s.
Регулирование скорости в разомкнутой системе «ТПН – АД»
Реализуется путем плавного изменения напряжения управления Uy (рис.5.6) в некотором диапазоне – является простейшим способом выполнения схемы плавного пуска АД. Можно показать, что снижение напряжения US статора двигателя при неизменной его частоте fS приводит к соответствующему снижению магнитного потока двигателя, что чревато дополнительным перегревом двигателя из-за возрастания потребляемого тока.
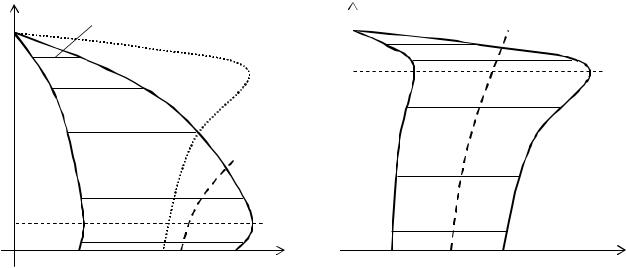
К тому же, при использовании короткозамкнутого АД возможности регулирования скорости при работе в пределах линейных участков характеристик ограничены (рис.5.11а) из-за того, что критический момент двигателя пропорционален квадрату приложенного напряжения, а критическое скольжение от него не зависит. Регулирование же скорости в зоне k обычно связано с
протеканием в обмотках двигателя больших токов, и поэтому не применяется из энергетических соображений.
Бо’льший практический интерес с точки зрения увеличения диапазона регулирования скорости представляет случай использования АД с фазным ротором, когда можно искусственно смягчить характеристики за счет введения в
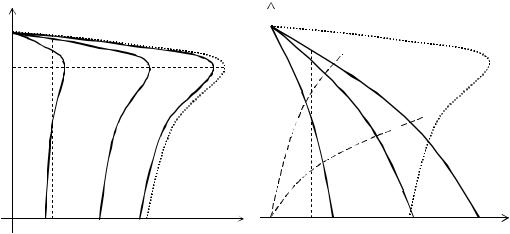
цепь ротора добавочного реостата RR.доб вплоть до того, чтобы обеспечитьk 0 ( sk 1) (рис.5.11б). Прерывистые линии показывают множества точек,
соответствующих работе двигателя с фиксированными значениями тока статора IS. Как следует из графиков, наиболее благоприятным условиям по нагреву двигателя соответствует нагрузка с вентиляторным характером изменения момента сопротивления.
|
|
|
|
|
|
0 |
|
0 |
|
IS=ISН |
|
|
|
k= 0(1-sk)
min |
EX |
min |
EX |
|
|||
|
IS=2ISН |
||
max |
|
max |
|
|
|
|
M |
M |
MC |
MC MН |
а) |
б) |
Рис.5.11. Механические характеристики разомкнутой системы «ТПН – АД» при RR.доб=0 (а) и RR.доб>0 (б)
Недостатками разомкнутой системы, кроме малого диапазона регулирования скорости, являются также низкие энергетические показатели и малая жесткость механических характеристик.
Регулирование скорости в замкнутой системе «ТПН – АД»
Повысить жесткость механических характеристик, а значит, добиться устойчивой работы (том числе и в зоне k ) можно, если использовать отрица-
тельные обратные связи по напряжению статора АД, току и скорости. Зона регулирования скорости k при этом также является нежелательной, поэтому
используют искусственное смягчение характеристик за счет введение в цепь ротора добавочного реостата.
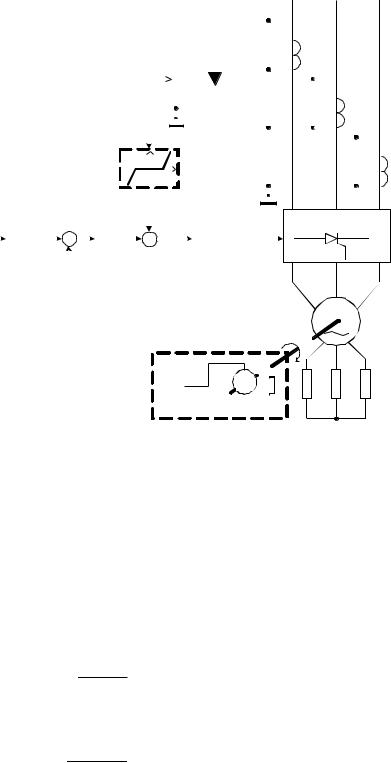
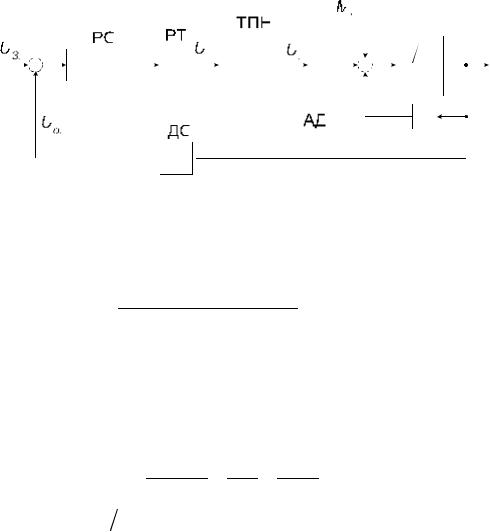
Рассмотрим один из наиболее распространенных вариантов системы с основной обратной связью по скорости и с обратной связью с токовой отсечкой
(ТО) (рис.5.12).
На входе промежуточного усилителя РТ, выполняющего функции П- регулятора тока, суммируются выходные напряжения регулятора скорости РС и отрицательной ОС по току с ТО. Измерение тока выполнено с помощью трансформаторов тока ТА1, ТА2 и ТА3, диодного моста VD. На входе РС суммируются напряжение задания UЗ.с скорости и напряжение Uо.с обратной связи по
скорости, получаемое с помощью тахогенератора на валу АД.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
Синтез регуляторов |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
до получения достаточно |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VD |
|
|
|
|
|
|
|
|
|
TA1 |
качественной |
системы |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
регулирования не может |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uд.т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
быть выполнен на осно- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TA2 |
вании структурной |
схе- |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мы |
|
рис.5.5, |
поскольку |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
она |
|
|
|
даже |
при |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-Iomc |
|
Uomc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TA3 |
|
S |
2 f |
S |
const остает- |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
TO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ся существенно нелиней- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Iomc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ной. |
Поэтому наиболее |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uт.о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТПН |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
UЗ |
|
UЗ.с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uу |
|
|
|
|
|
|
|
|
|
|
|
|
часто используют линеа- |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
ЗИ |
|
|
|
|
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ризацию уравнений дви- |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3ф. ~ |
гателя в окрестности не- |
||||||||||||||||||||||||||||
|
|
|
|
U о.с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
которой рабочей точки. |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
US |
|
|
|
Из |
|
|
последней |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
структурной |
схемы дви- |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
гателя (рис.5.5) видно, |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MG |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RR.доб |
что, |
если |
пренебречь |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДН |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
электромагнитным |
пере- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ДС |
ходным |
|
|
процессом |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Рис.5.12. Функциональная схема замкнутой системы |
(TЭ 0), то для момента |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
двигателя |
справедливым |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
«ТПН – АД». |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
является уравнение: |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
M |
|
|
|
3z p |
|
|
sUS2 , т.е. момент является нелинейной функцией двух пере- |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2Rдв S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
менных – напряжения US и скольжения s. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Выполняя |
разложение |
|
в |
|
|
|
ряд Тейлора в окрестности |
рабочей |
точки |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
US USo ; |
|
|
s so ; |
|
|
M M o , можно получить уравнение в приращениях: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M kU US , |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
где k |
|
|
|
3z p |
soU o – коэффициент, отражающий приращение по моменту от |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
U |
|
|
Rдв S |
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
конечного изменения напряжения US при 0 ; |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
3z2p |
USo 2 – коэффициент, отражающий приращение по моменту от |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2R |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
дв |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
конечного изменения скорости при US 0 , численно равный расчетной жесткости характеристик M , принятой при линеаризации.
, принятой при линеаризации.
С учетом этого может быть изображена структурная схема системы (символы приращений опущены), представленная на рис.5.13. Здесь введено обозначение механической постоянной времени привода TM J . Кроме того,
. Кроме того,
электромагнитная постоянная времени TЭ отнесена к малой некомпенсируемой (теперь T TСИФУ з TЭ ).
|
|
k |
|
|
1 |
|
||
W p |
|
|
|
|||||
kPT |
kU |
|
||||||
T p 1 |
|
|
|
|
|
|||
PC |
|
|
|
T p |
|
|||
|
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
M |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kд.с
Рис.5.13. Линеаризованная структурная схема системы «ТПН – АД», замкнутой по скорости.
Коэффициент передачи РТ выбирается, исходя из желаемого статизма токовой отсечки [Терехов, Осипов]:
kPT |
|
US |
|
, |
|
k kд.тIотс I |
Iотс жел |
||||
|
|
|
|||
где kд.т – коэффициент передачи датчика тока; |
Iотс – значение тока отсечки; |
||||
I – желаемое превышение током статора двигателя уровня отсечки, приводящее к снижению напряжения US .
Тогда на основании структурной схемы рис.5.13 может быть определена ПФ регулятора скорости:
WPC p TM p 1 |
|
TM |
1 |
, |
|
|
TРC p |
|
TРC |
TРC p |
|
где TРC kU k kPT kд.сTC |
– постоянная времени интегрирования РС; |
||||
TC – эквивалентная постоянная времени интегрирования разомкнутого кон-
тура скорости.
Для обеспечения приемлемых динамических свойств системы рекомендуют принимать TC 3 5 T .
Система обладает в этом случае абсолютно жесткими механическими характеристиками (рис.5.14). При введении в РС только пропорциональной составляющей (П-РС) жесткость характеристик будет конечной.
При отсутствии добавочного реостата (рис.5.14б) длительность работы системы в зоне k должна быть ограничена.
|
|
UЗ.с1 |
|
|
0 |
|
|
|
|
|
|
ЕХ |
|
|
|
|
|
|
|
|
|
UЗ.с2<UЗ.с1 |
min |
|
|
|
|
|
|
|
|
max UЗ.с3<UЗ.с2 |
|
|
|
|
|
|
І = Іотс |
|
|
UЗ.с4<UЗ.с3 |
|
|
0(1-sk) |
|
UЗ.с5<UЗ.с4 |
M |
|
|
|
|||
І = Іотс
0 UЗ.с1
UЗ.с2<UЗ.с1
0(1-sk)
UЗ.с3<UЗ.с2
max min
UЗ.с4<UЗ.с3
UЗ.с5<UЗ.с4
M
а) б)
Рис.5.14. Механические характеристики в замкнутой системе «ТПН – АД» при RR.доб>0 (а) и RR.доб=0 (б).