

matlab / МУ
.pdfПромоделюйте прямий пуск АД, накид та скид номінального навантаження ( M C = M H ). Встановіть, як впливає на перехідні процеси в АД вплив певного фак- тора (табл.1.2) і його величина. Промоделюйте режими динамічного гальмування АД, реверса (шляхом зміни порядку чергування фаз).
Примітка: в табл.1.1 даний момент інерції J власно двигуна, тому при моде- люванні цю величину слід збільшувати якнайменш у 2 – 3 рази.
Таблиця 1.2 – Фактори, вплив яких на перехідні процеси необхідно простежити
№ |
Фактор |
|
Примітка |
||
вар. |
|
||||
|
|
|
|
||
1 |
Несиметрія обмоток статора |
RsA ≠ |
RsB ≠ RsC |
||
2 |
LAAσ ≠ LBBσ ≠ LCCσ |
||||
|
|||||
3 |
Несиметрія обмоток ротора |
Rra ≠ |
Rrb ≠ Rrc |
||
4 |
Момент інерції є функцією кутового |
J (θ ) = |
J cp [1 + k J sin(kθ θ )] |
||
положення ротора |
|||||
|
|
|
|
||
5 |
Момент навантаження є функцією |
M C (θ ) = |
M Ccp [1 + kM sin(kθ θ )] |
||
кутового положення ротора |
|||||
|
|
|
|
||
6 |
Несиметрія напруги живлення |
U sAm ≠ |
U sBm ≠ U sCm |
||
7 |
ϕ sA ≠ |
ϕ sB ≠ ϕ sC |
|||
|
|||||
8 |
Несинусоїдність напруги живлення |
Напруга прямокутна |
|||
9 |
(періодичність залишається незмінною) |
Напруга полігармонічна |
|||
Вусіх випадках отримуйте такі графіки:
•залежності амплітудних (або ефективних) значень струмів статора та ротора, електромагнітного моменту та швидкості АД в функції часу;
•залежності миттєвих значень напруги статора, струмів статора та ротора в фу- нкції часу.
•залежності амплітудних (ефективних) значень струмів статора та ротора, а та- кож електромагнітного моменту в функції частоти обертання АД (динамічні характеристики).
1.3Методичні вказівки та рекомендації до виконання роботи
Для підвищення зручності використання математичного опису АД в (1.2) по-
значимо: |
cos(θ r ), c2 = cos( θ r + |
2π / 3) , c3 = cos( θ r + 4π / 3) ; |
|||||
c1 = |
|||||||
ess |
= 1 + |
3 |
σ |
s , err = 1 + |
3 |
σ |
r . |
|
|
||||||
|
2 |
|
2 |
|
|
||
Тоді з урахуванням (1.3) – (1.9) рівняння (1.2) перетворимо до вигляду:
Ψ0 = L0I0 ,
де
10

|
|
|
|
|
|
|
|
|
ess |
− 1 2 − 1 2 c1 |
c2 |
c3 |
|
|||||||||||
|
|
|
|
|
|
|
|
|
− 1 2 |
e |
ss |
− 1 2 c |
3 |
c |
c |
2 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
||||
|
= |
Ψ |
s ; |
I0 |
= Is ; L0 = |
|
|
|
|
− 1 2 ess |
c2 |
c3 |
c1 |
|
||||||||||
Ψ0 |
|
2 Lm − 1 2 |
. |
|||||||||||||||||||||
|
|
Ψ |
r |
|
|
I |
r |
3 |
|
|
1 |
c |
3 |
c |
2 |
e |
rr |
− 1 2 − 1 2 |
|
|||||
|
|
|
|
|
|
|
c |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
c |
2 |
c |
c |
3 |
− 1 2 |
e |
rr |
− 1 2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
c2 |
c1 − 1 2 |
− 1 2 |
err |
||||||||||
|
|
|
|
|
|
|
|
|
c3 |
|
||||||||||||||
Вирішуючи це матричне рівняння відносно об’єднаного вектору струмів:
I0 = L−01Ψ0 , |
(1.12) |
можна визначати на кожному кроці чисельного інтегрування поточні значення фаз- них струмів статора і ротора.
Можливість багатьох блоків програми Simulink, зокрема блоку Integrator, об- робляти векторні сигнали, дозволяє створити дуже компактну і наочну модель АД в трифазній системі координат. Цьому ж сприяє наявність у складі Simulink блоку
Matlab Fcn бібліотеки Functions&Tables, що створює інтерфейс між Matlab-
функціями і додатком Simulink.
Структурна схема АД у фазних координатах, що побудована на основі рівнянь
(1.1), (1.8), (1.10а), (1.11а), (1.12), зображена на рис.1.1.
|
|
|
|
|
|
|
|
|
|
|
|
Matrix Gain |
|
|
|
|
|
|
|
PSIs_ABC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PSIr_abc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Us_ABC |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Is_ABC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L0 |
\ |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ZpIr'DΨ r |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
Zp |
|
|
|||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J.s |
|
|
|
|
|
s |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MATLA B Fcn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MATLAB Fcn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Ur_abc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ir_abc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.1 – Структурна схема АД у фазних координатах
Синусоїдні вхідні сигнали фазних напруг статора формуються джерелами си-
нусоїдних сигналів Sine Wave бібліотеки Sources: |
|||||
usA = |
U sAm sin(ω |
st + |
φ sA); |
|
|
usB = |
U sBm sin(ω |
st − |
2π |
/ 3 + |
φ sB ); |
usC = |
U sCm sin(ω |
st + |
2π |
/ 3 + |
φ sC ), |
де U sAm , U sBm , U sCm – амплітуди фазних напруг статора; φ sA , φ sB , φ sC – фазові кути фазних напруг статора;
ω s – кутова частота напруги статора.
Для АД із короткозамкненим ротором фазні напруги ротора дорівнюють ну-
лю:
11

ura = urb = urc = 0 .
За умови повної симетрії напруги статора
U sAm = U sBm = U sCm = U sfm , φ sA = φ sB = φ sC = φ sf .
У каталозі задані номінальна частота напруги статора ( fs.H , Гц)1 і ефективне (діюче) значення номінальної лінійної напруги статора (U sle.H , В). За цими даними можна розрахувати номінальне ефективне і амплітудне значення напруги статора
U sfe.H = U sle.H , |
U sfm.H = U sfe.H |
|
, |
2 |
|||
3 |
|
|
|
а також номінальну кутову частоту напруги статора ω s.H = 2π fs.H .
На першому етапі виконання роботи амплітуду фазних напруг слід задати
U sfm = U sfm.H , а фазовий кут φ sf |
обрати довільно. |
Коефіцієнт блоку Matrix Gain відповідає клітинній матриці активних опорів в |
|
(1.1): |
Rra Rrb Rrc ]) . |
R = diag([RsA RsB RsC |
|
Об’єднання сигналів у вектори і поділ їх на окремі складові, виконується бло- ками Mux і Demux бібліотеки Signals&Systems відповідно.
Блоки Matlab Function використовуються для обчислення сигналів струмів за (1.12), а також для формування сигналу електромагнітного моменту за формулою (1.10а). Для цього дослідником повинні бути написані власні функції, які, напри- клад, можуть мати вигляд:
function Io = name1(u) |
|
|
function M_em = name2(u) |
|||
global Lm Ess |
Err |
|
|
|
global Zp Lm |
|
PSIo=u(1:6); tetar=u(7); |
|
u=u(:)'; |
||||
c1=cos(tetar); |
|
|
|
D=[0 1 -1; -1 0 1; 1 -1 0]; |
||
c2=cos(tetar+2*pi/3); |
|
|
PSIr=u(1:3)'; |
|||
c3=cos(tetar+4*pi/3); |
|
|
Ir=u(4:6); |
|||
L=[Ess |
-1/2 |
-1/2 |
c1 |
c2 |
c3; |
M_em=Zp*Ir*D*PSIr/sqrt(3); |
-1/2 |
Ess |
-1/2 |
c3 |
c1 |
c2; |
|
-1/2 |
-1/2 |
Ess |
c2 |
c3 |
c1; |
|
c1 |
c3 |
c2 |
Err |
-1/2 -1/2; |
|
|
c2 |
c1 |
c3 |
-1/2 |
Err -1/2; |
|
|
c3 |
c2 |
c1 |
-1/2 |
-1/2 |
Err]; |
|
L=2/3*Lm*L; |
PSIo=PSIo(:); |
|
|
|||
Io=L\PSIo; |
|
|
|
|
|
|
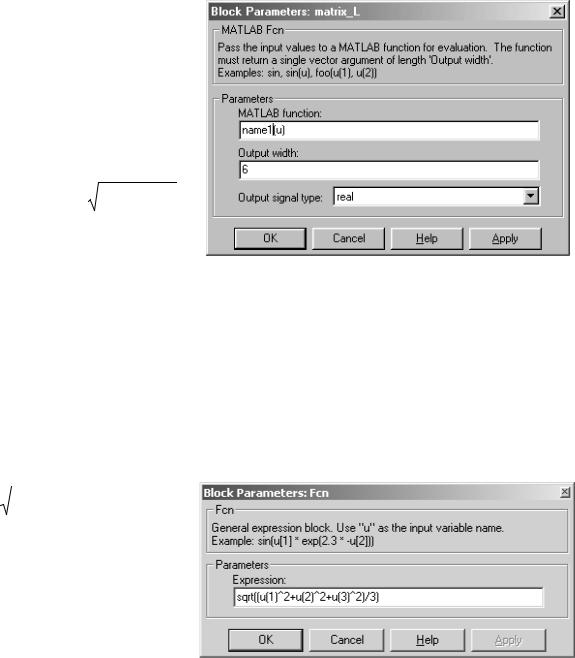
Ці функції необхідно зберегти в m-файлах під іменами, що збігаються з іме- нами функцій name1.m і name2.m, і зробити посилання на них у вікнах параметрів блоку. Для приклада на рис.1.2 показане вікно введення параметрів блоку Matlab Fcn. У полі Output width вказується розмір вихідного параметру.
Аргументи функцій відповідають вхідним сигналам ланки, а результати – ви- хідним.
Перед початком виконання роботи також слід скласти Script-файл з парамет- рами двигуна.
1 Тут і далі індексом “Н” помічаються номінальні значення величин.
12
Окрім паспортних даних цей файл повинен містити розрахунок додаткових параметрів, а також об’явлення глобальних змінних
Lm , z p , ess , err . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для |
|
|
|
розрахунку додаткових |
|
|
|
|
|
|||||||||||||||||
параметрів двигуна слід викорис- |
|
|
|
|
|
|||||||||||||||||||||
товувати наступні формули: |
|
|
|
|
|
|||||||||||||||||||||
X m = |
|
|
U sfe.H − |
I xx |
Rs2 + |
X s2σ |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
I xx |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
L |
|
= |
|
|
|
X m |
, σ |
s |
|
= |
X sσ |
, |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
m |
|
|
|
ω s.H |
|
|
X m |
|
|
|
Рисунок 1.2 – Вікно визначення параметрів |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n0 − nH |
|
блока MATLAB Fcn |
|||||
σ |
r = |
|
|
X rσ |
, n0 |
= |
|
3000 |
, |
sH = |
, ω 0 = |
2π n0 |
, ω |
H = ω 0 (1 − sH ) , M H = |
PH |
, |
||||||||||
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
60 |
|
|||||||||||||||||||
|
|
|
|
|
|
X m |
|
|
|
Zp |
|
|
|
nH |
|
ω H |
||||||||||
де I xx |
– струм статора у режимі холостого ходу, n0 , ω 0 |
– синхронні частота і куто- |
||||||||||||||||||||||||
ва швидкість ротора, |
sH , ω |
H , M H – номінальні ковзання, кутова швидкість та мо- |
||||||||||||||||||||||||
мент двигуна. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Ефективні значення електромагнітних величин можуть бути виражені через |
||||||||||||||||||||||||||
миттєві фазні значення за формулою: |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
Y |
fe |
= |
|
|
(Y 2 + Y |
2 |
+ Y 2 ) / 3 , |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
A |
|
B |
C |
|
|
|
|
|
|
|
|
|
|
||||||
обчислення за якою доцільно ре- алізувати за допомогою блока Fcn
бібліотеки Functions&Tables, вік-
но параметрів якого зображене на рис.1.3.
При дослідження випадків несиметрії параметри відповідних блоків змінюються відповідно до мети досліджень.
Для дослідження впливу несинусоїдності напруги на перехідні процеси в мо- делі можна або замінити джерела напруг на будь-які інші, використовуючи блоки бібліотеки Sources (наприклад, на генератори прямокутних імпульсів Pulse Generator), або сформувати сигнали напруги як суми гармонічних складових з відповідними коефіцієнтами (при полігармонічному живленні).
Увипадку необхідності дослідження впливу навантаження, що періодично змінюється в функції кута повороту ротора, такий сигнал моменту статичного опору формується за допомогою блоку Fcn.
Увипадку ж, коли момент інерції є функцією кутового положення ротора, у
моделі слід замінити вузол електромеханічного перетворення, складений за (1.11а), на такий, що відповідає рівнянню (1.11) (рис.1.4). При цьому сигнал dJ  dθ рекоме-
dθ рекоме-
13

ндується попередньо обчислити аналітично, якщо це можливо, якщо ні – використа- ти тотожне (1.11) рівняння руху:
J |
d ω |
+ |
1 |
ω |
d J |
= M − M C , (1.11б) |
d t |
|
|
||||
|
2 |
|
d t |
|||
і скористатися блоком Derivative бібліо-
теки Continuous.
Для дослідження режиму динамі- чного гальмування АД треба в момент початку гальмування напругу однієї з фаз статора зробити рівною нулю, а на дві інші фази подати постійні за зна- ченням та протилежні за знаком сигна- ли, наприклад,
Jcp
Fcn
Mc |
J |
|
f(u) |
|
|
|
|
|
|
||
|
1 |
|
1 |
|
Zp |
|
|
w |
|
teta |
|
M |
s |
s |
tetar |
||
|
|
|
Fcn1
1/2
f(u)
pJ
Рисунок 1.4 – Підсистема електромеха- нічного перетворення енергії
у випадку J = f (θ )
usA = U sfe.H  2 , usB = − U sfe.H
2 , usB = − U sfe.H  2 , usC = 0 .
2 , usC = 0 .
Це може бути зроблено за допомогою ланок Switch бібліотеки Nonlinear.
Для дослідження режиму реверса в момент початку реверса слід аналогічним чином змінити порядок чергування фаз (наприклад, з ABC на ACB), помінявши міс- цями відповідні сигнали фазних напруг статора.
1.4Контрольні запитання
1.Які припущення щодо АД були використані при складанні математичної моделі? Яким чином вплив відповідних факторів може бути урахований?
2.Охарактеризуйте динамічні властивості, які притаманні АД при прямому
пуску.
3.Чи можна за динамічними характеристиками можна оцінити значення кри- тичних моменту та ковзання, значення пускових моменту та струмів статора і рото- ра?
4.У яких випадках на практиці можуть мати місце несиметричні режими ро- боти АД (змінний момент навантаження або момент інерції), що були промодельо- вані?
5.Охарактеризуйте вплив несиметрії АД (змінного моменту навантаження або моменту інерції) на перехідні процеси. Яка степінь несиметрії (амплітуда гармоніч- ної складової моменту навантаження або моменту інерції) є максимально допусти- мою з позиції зберігання працездатності системи?
6.Охарактеризуйте процеси в АД у режимах динамічного гальмування, ревер-
су.
7.Яким чином (за якою схемою) на практиці здійснюються прямий пуск, ди- намічне гальмування та реверс АД? Яке припущення відносно роботи комутаційних апаратів було використано при виконанні роботи? Як його можна урахувати?
8.Дайте рекомендації щодо областей застосування розробленої моделі.
14

2 Лабораторна робота № 2
МОДЕЛЮВАННЯ КООРДИНАТНИХ ПЕРЕТВОРЮВАЧІВ
2.1 Теоретичні відомості
Для спрощення математичного опису машин змінного струму дуже часто при- бігають до еквівалентного перетворення координат, в основі якого лежить припу- щення про повну симетрію електричної машини, а також поняття узагальненого ве-
ктора [1]. |
|
|
Розглянемо трифазну систему координатних осей, нерухому в |
просторі |
|
(рис.2.1). З центра системи координат проведемо вектор струму статора |
~ |
такий, |
Is |
||
що його проекції на осі А, В та С дорівнюють миттєвим значенням струму відповід- них фаз статора.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При обертанні вектора Is з куто- |
||||||||||||||
|
|
|
|
|
|
|
|
ω k 1 |
|
|
|
α |
|
|
|
вою швидкістю ω s |
= |
d θ s |
|
відносно фаз- |
||||||||||||
|
|
ω s |
|
|
|
|
d t |
|||||||||||||||||||||||||
|
|
|
|
is1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
isA=isα |
|
ної системи координат статора A,B,C |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
його проекції на координатні осі будуть |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
Is |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
θ s |
|
|
|
|
|
|
|
|
дорівнювати: |
|
|
|
|
|
|
|||||||
|
|
|
isC |
|
|
|
|
|
|
|
|
|
θ k |
|
|
|
isA = |
I sfm sin(θ s ); |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3); |
|||||||||||||
|
β |
|
|
|
|
|
|
isβ |
|
|
|
|
|
|
|
|
|
isB = |
I sfm sin(θ s − |
2π |
||||||||||||
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
i |
|
|
= |
I |
|
sin(θ |
|
+ |
2π |
3), |
||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
sC |
sfm |
s |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
s2 |
isB |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де I sfm |
|
– амплітуда фазного струму ста- |
|||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
~ |
|||
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тора, θ s – |
кут між вектором Is і віссю А |
||||||||||||
|
|
|
|
|
|
|
|
Рисунок 2.1 |
|
|
|
статора. |
|
|
|
|
|
|
|
|
|
|||||||||||
|
Таким чином, за допомогою одного вектора, який обертається, можливо пред- |
|||||||||||||||||||||||||||||||
ставити симетричні синусоїдні сигнали усіх трьох фаз статора. |
|
|
~ |
|
||||||||||||||||||||||||||||
|
Цей вектор називають узагальненим. Узагальнений вектор |
пов’язаний із |
||||||||||||||||||||||||||||||
|
Is |
|||||||||||||||||||||||||||||||
значеннями фазних струмів виразом: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
~ |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
I s |
= |
|
|
|
isA + a isB + a |
|
isC = |
|
aIs , |
|
|
|
|
|
|
|
|
|
|
(2.1) |
|||||||||||
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
де a = [1 |
|
|
|
2 ] – вектор комплексних ортів; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
a |
a |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
a = e j 2π / 3 = − 1 + j |
|
|
3 |
, |
|
a 2 = e j4π / 3 = − 1 − j |
|
|
3 |
. |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|||||
Аналогічним чином вводяться інші узагальнені вектори електромагнітних ве- личин – напруг, струмів, потокозчеплень – статора і ротора. В останньому випадку узагальнені вектори вводяться у трифазній системі координат a,b,c ротора.
15

Обертання узагальненого вектора відбувається в одній площині, тому стає зрозумілим, що трифазна система координат є надмірною, і більш доцільним є ви- користання ортогональної двофазної системи координат.
Введемо ортогональну систему координат статора α ,β (рис.2.1), одна вісь якої (наприклад, α ) співпадає з віссю А для сигналів статора, а інша (β ) є ортогональною до неї (поверненою кут 90° проти годинникової стрілки). Така система координат зветься стаціонарною (нерухомою) ортогональною системою координат статора,
оскільки вона, як і система координат A,B,C, є нерухомою відносно статора. Для зручності проекції електромагнітних величин на одну з осей (наприклад, α ) умовно вважаються дійсними складовими, на іншу (β ) – уявними. Таким чином, узагальне- ний вектор, наприклад, струму статора у нерухомій ортогональній системі коорди- нат може бути представлений у комплексному вигляді:
~ |
= isα + jisβ = I sfm (cosθ s + j sinθ s ) = Isfme jθ s . |
(2.2) |
Is _ αβ |
Таким же чином може бути представлений, наприклад, узагальнений вектор струму ротора у нерухомій ортогональній системі координат ротора u,v.
У нерухомих системах координат сигнали є гармонічними і змінюються з час- тотами, що дорівнюють таким у природних трифазних системах координат: так, си- гнали статора змінюються з кутовою частотою джерела ω s , а ротора – з кутовою ча-
стотою ковзання sω s = ω |
s − ω r |
1. |
|
|
Якщо ввести ортогональну систему координат 1,2 (рис.2.1), яка обертається з |
||||
довільною швидкістю ω |
k відносно нерухомої, одну з осей (1) визначити як дійсну, а |
|||
іншу (2) – як уявну, то узагальнений вектор (2.1) |
можна представити у вигляді: |
|||
~ |
(isα + jisβ )(cosθ k − j sinθ |
~ |
(2.3) |
|
Is _12 = is1 + jis2 = |
k ) = I s _ αβ e− jθ k . |
|||
Легко побачити, що зворотне перетворення виконується за формулою:
~ |
~ |
(2.4) |
Is _ αβ |
= I s _12e jθ k . |
|
Таким чином, положення системи координат 1,2 відносно нерухомої α ,β ста- |
||
тора визначається кутом |
|
|
θ k = |
θ k 0 + ∫ω k d t , |
(2.5) |
де θ k 0 – початкове значення кута між системами координат. У той же час положен- ня ротора відносно статора визначається кутом θ r , який визначається за (1.8). Не важко побачити, що кут, який характеризує положення системи координат 1,2 від-
носно нерухомої u,v ротора, буде дорівнювати
θ k − θ r = θ k 0 − θ r 0 + ∫ (ω k − ω r ) d t ,
а вираз, наприклад, для вектора струму ротора у системі координат 1,2 буде мати вигляд:
1 Це підтверджують графіки миттєвих значень, що мають бути отримані в результаті виконання лабораторної роботи 1.
16
~ |
= ir1 + |
jir 2 = |
~ |
− j(θ k − θ r ) . |
(2.6) |
Ir _12 |
Ir _ uve |
Викладене є справедливим також і для векторів напруг і потокозчеплень ста- тора і ротора.
Аналізуючи (2.6), можна зробити загальний висновок про те, що для перетво- рення векторів від однієї довільної системи координат достатньо знати кутове по- ложення систем координат одна відносно одної.
З викладеного витікає такий важливий висновок, що частота зміни початково- го гармонічного (у нерухомій системі координат) сигналу обмотки, перетвореного до системи координат, що обертається відносно цієї обмотки з кутовою швидкістю ω k , становитиме ω s − ω k для статора, і ω s − ω r − ω k для ротора АД.
2.2 Завдання
Розробіть структурні схеми наступних перетворювачів координат:
• від нерухомої трифазної системи координат до нерухомої ортогональної (пере- творювач 3→ 2);
• від нерухомої ортогональної системи координат до ортогональної, що оберта- ється із кутовою швидкістю ω k (перетворювач 2→ 2);
• від ортогональної системи координат, що обертається із кутовою швидкістю ω k , до нерухомої ортогональної (перетворювач 2→ 2);
• від нерухомої ортогональної системи координат до нерухомої трифазної (пере-
творювач 2→ |
3). |
|
|
|
|
|
|
|
|
|||
Складіть модель послідовного перетворення вхідного сигналу напруги статора |
||||||||||||
у трифазній системі координат |
|
|
|
|||||||||
usA = |
U sfm sin(ω |
st + |
φ s ); |
|
|
|
||||||
usB = |
U sfm sin(ω |
st − |
2π |
/ 3 + |
φ s ); |
|||||||
u |
sC |
= |
U |
sfm |
sin(ω |
s |
t + |
2π |
/ 3 + |
φ |
s |
). |
|
|
|
|
|
|
|
|
|
||||
до обертовій системи координат 1,2 і назад, використовуючи усі розроблені коорди- натні перетворювачів. Значення U sfm , ω s оберіть рівними відповідним номінальним
величинам із лабораторної роботи 1, значення φ s оберіть довільно. Значення кута θ k обчислюйте за (2.5), його початкове значення θ k 0 оберіть довільно.
Моделювання виконайте при різних законах змінювання ω k в функції часу:
1)ω k = ω s = const ;
2)ω k = ω s / N ;
3)ω k =10Nω st ;
4)ω k = 10Nω s sin Nt ,
де N – номер вашого варіанту.
Укожному випадку впевніться у тотожності початкових і кінцевих сигналів.
Узвіті навести сигнали напруг у системі координат A,B,C , α ,β , i 1,2 , а також частоти обертання ω s і ω k в функції часу.
17

2.3 Методичні вказівки та рекомендації до виконання роботи
На практиці найбільш поширеним є саме двоступінчате перетворення коорди- нат у кожному напрямку. Формули координатних перетворень можуть бути отрима- ні із аналізу рис.2.1.
Так, перетворення 3→ 2 може бути виконано за формулами:
usα |
= |
usA ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
(u |
|
|
|
|
|
) |
|
|
|
|
|
(2.7) |
|
u |
sβ |
= |
|
|
sB |
− |
u |
sC |
. |
|
|
|
|||||||
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Перетворення 2→ |
2: |
|
|
|
|
|
|||||||||||||
u |
s1 |
= |
u |
sα |
|
cosθ |
k |
+ |
u |
sβ |
sinθ |
k |
; |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
(2.8) |
|||||||
u |
|
= |
− |
u |
|
|
sinθ |
|
+ u |
|
|
cosθ |
|
||||||
s2 |
sα |
k |
sβ |
. |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
||||||
Зворотне перетворення 2→ |
2: |
|
|||||||||||||||||
usα |
= |
us1 cosθ k |
− |
us2 sinθ k ; |
(2.9) |
||||||||||||||
usβ |
= |
us1 sinθ k |
+ |
us2 cosθ k . |
|||||||||||||||
Перетворення 2→ |
3: |
|
|
|
|
|
|||||||||||||
usA = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
usα |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
1 usα |
|
3 usβ |
|
|
|
|
|||||||||
usB = |
− |
+ |
; |
|
|
(2.10) |
|||||||||||||
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
usC = − 1 usα − |
|
3 usβ |
. |
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
Для перетворення сигналів ротора у формулах (2.8) і (2.9) замість кута θ k ви- |
|||||||||||||||||||
користовують кут θ k |
− |
θ r , де θ r |
– кут між осями фаз A статора і a ротора. |
||||||||||||||||
При моделюванні можливі різні підходи до складання структурних схем коор- динатних перетворювачів: матричне перетворення, перетворення комплексних ве- личин і безпосереднє обчислення за (2.7) – (2.10). Саме останній підхід найчастіше реалізується у реальних САК.
Структурні схеми перетворювачів координат, складені за формулами (2.7) – (2.10), наведені на рис.2.2.
|
|
|
|
Us_a |
|
|
1 |
|
1 |
1 |
|
1 |
|
|
|
|
Us_alfa |
1/2 |
2 |
Us_a |
|
Us_alfa |
||
|
|
Us_b |
||
2 |
1/sqrt(3) |
2 |
|
|
|
|
|||
Us_b |
|
Us_beta |
|
|
3 |
|
2 |
sqrt(3)/2 |
3 |
Us_c |
|
s_beta |
|
Us_c |
|
а) |
|
|
б) |
18

1 |
Us_1 |
1 |
Us_alfa |
|
1 |
1 |
|||
|
Us_1 |
|||
Us_alfa |
|
|
|
2 |
|
2 |
2 |
Us_2 |
2 |
Us_beta |
|
|
||
Us_beta |
|
Us_2 |
|
3 |
cos |
cos |
sin |
3 |
|
tetak |
sin |
|
|
tetak |
в) г)
Рисунок 2.2 – Структурні схеми координатних перетворювачів:
а – 3→ 2; б – 2→ 3; в – 2→ 2; г – 2→ 2 (зворотній)
2.4Контрольні запитання
1.Дайте визначення поняттю “узагальнений вектор”.
2.У чому складається сутність координатних перетворень?
3.Як відрізняються сигнали у системі координат α ,β від відповідних їм сиг- налів у системі координат A,B,C?
4.Охарактеризуйте залежності сигналів у системі координат 1,2, в функції часу у кожному випадку. Доведіть правильність отриманих результатів, використо- вуючи рис.2.1.
Лабораторна робота № 3
МОДЕЛЮВАННЯ АСИНХРОННОЇ МАШИНИ В ОРТОГОНАЛЬНІЙ СИСТЕМІ КООРДИНАТ
3.1 Теоретичні відомості
Метою моделювання АД в ортогональних двофазних координатах є створення моделі АД, еквівалентної за своїми основними властивостями об’єкту і його моделі у фазних координатах, котра у той же час є більш простою, і тому більш зручною у моделюванні і придатною до синтезу ефективних алгоритмів управління АД.
Якщо ДР електричної рівноваги кіл статора та ротора АД (1.1) за умови його симетрії записати у розгорнутому вигляді (отримаємо 6 скалярних рівнянь), потім перше і четверте рівняння помножити на 2 3 , друге і п’яте – на 2
3 , друге і п’яте – на 2 3 a , третє і шосте
3 a , третє і шосте
– на 2 3 a 2 , а потім окремо скласти три перших і три останніх рівняння, з ураху- ванням (2.1) отримаємо систему двох векторних ДР:
~ |
|
|
~ |
|
dΨ |
~ |
|
|
|
|
|
U s = |
Rs I s |
+ |
|
s |
|
; |
|
||||
|
|
|
|||||||||
|
|
|
|
|
|
d t |
|
(3.1) |
|||
~ |
|
|
~ |
|
dΨ |
~ |
|
|
|
||
|
= |
+ |
r |
. |
|
|
|||||
U |
r |
R I |
r |
|
|
|
|||||
|
|
|
|||||||||
|
|
r |
|
d t |
|
||||||
|
|
|
|
|
|
|
|
||||
19