

matlab / МУ
.pdf
|
Rs |
|
3 |
|
|
1 |
1 |
1/Tr |
Is1 |
|
|
s |
|
|
|
||
Us1 |
|
|
|
|
|
|
|
|
|
|
|
|
4 |
1/(Rs+Ls/Tr) |
|
|
|
|
Kr |
|
|
|
|
|
Ur1 |
Tsl.s+1 |
|
|
|
|
|
|
|
|
|
3 |
PSIs1 |
|
|
|
|
1 |
|
|
|
|
|
Wk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr |
Zp |
|
|
|
|
|
|
|
|
|
o*Ls |
|
|
|
|
|
|
|
6 |
|
|
PSIs2 |
|
|
Mc |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1/(Rs+Ls/Tr) |
3/2*Zp |
1 |
6 |
|
5 |
|
|||
|
Kr |
|
J.s |
w |
|
|
Ur2 |
Tsl.s+1 |
|
||
|
|
|
|||
|
|
|
5 |
|
|
|
1 |
|
|
|
|
2 |
1/Tr |
|
M |
|
|
|
|
|
|||
s |
|
|
|
||
Us2 |
|
Is2 |
|
|
|
|
|
|
|
||
|
Rs |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
~ |
Рисунок 3.4 – Структурна схема АД у відповідності до структури Is , Ψ |
s |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
~ |
, Ψ |
~ |
отримується шляхом вираження із (3.8) струму ротора і по- |
|||||||||||||||||||||||||||||||||
Структура I s |
|
r |
|||||||||||||||||||||||||||||||||||||||||||||
токозчеплення статора: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
i |
|
|
= |
− 1 |
|
|
|
− k |
|
i |
|
; |
|
|
|
|
i |
|
= |
|
|
|
− 1 |
|
− |
k |
|
i |
|
|
; |
|
|
|
|
|
|
|
|||||||||
r1 |
L |
r |
ψ |
|
r1 |
|
s1 |
|
|
|
|
r 2 |
|
L |
r |
ψ |
r 2 |
r |
s2 |
|
|
|
|
|
(3.17) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
ψ s1 = krψ r1 + σ Lsis1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
ψ s2 = krψ r 2 + σ Ls is2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
і підставлення (3.17) у (3.7): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
us1 = Rsis1 + kr pψ r1 + σ Ls pis1 − krω kψ r 2 + σ Lsω k is2 ; |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
u |
s2 |
= |
R i |
s2 |
+ k |
r |
pψ |
r 2 |
+ |
σ L |
s |
pi |
s2 |
+ |
k |
ω ψ |
|
|
|
|
+ |
σ L ω |
i |
s1 |
; |
|
|
||||||||||||||||||||
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
k r1 |
|
|
|
s |
k |
|
(3.18) |
|||||||||||||||||||
u |
r1 |
= |
T − |
1ψ |
r1 |
|
− |
k |
R i |
s1 |
+ |
|
pψ |
|
r1 |
− |
(ω |
k |
− |
ω |
r |
)ψ |
|
r 2 |
; |
|
|
|
|
||||||||||||||||||
|
|
|
|
r |
|
|
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
u |
r 2 |
= |
T − 1ψ |
|
r 2 |
− |
|
k |
|
R i |
s |
2 |
+ pψ |
r 2 |
+ |
(ω |
k |
− ω |
|
|
r |
)ψ |
r1 |
. |
|
|
|
|
|
||||||||||||||||||
|
|
|
|
r |
|
|
|
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Рівняння балансу напруги статора у (3.18) містять по дві похідних від сигналів складових. Виконаємо перетворення, віднявши від першого та другого рівнянь (3.18) відповідно третє і четверте, помножені на kr . В результаті рівняння рівноваги напруг статора та ротора можна привести до вигляду:
30

u |
s1 |
− |
k |
r |
u |
r1 |
= |
|
R i |
s1 |
+ |
σ L pi |
s1 |
+ |
σ L |
ω |
|
i |
s2 |
− |
k |
T |
− 1ψ |
r1 |
− |
k |
ω ψ |
|
; |
|
|
|||||||||||||||
|
|
|
|
|
|
|
l |
|
|
|
s |
|
|
|
s |
|
k |
|
|
r r |
− 1ψ |
|
r |
|
r r 2 |
|
|
|
||||||||||||||||||
u |
s2 |
− |
k |
|
|
u |
r 2 |
= |
R i |
s2 |
+ |
σ L |
|
pi |
s2 |
+ σ L |
ω |
i |
s1 |
− k |
|
T |
|
r 2 |
+ k |
ω ψ |
r1 |
; |
(3.19) |
|||||||||||||||||
|
|
|
|
r |
|
|
|
l |
|
|
|
|
s |
|
|
− (ω |
s |
|
k |
)ψ |
|
r |
|
r |
|
|
r |
r |
|
|||||||||||||||||
u |
r1 |
= |
T |
− 1ψ |
r1 |
− k |
|
R i |
s1 |
+ pψ |
|
r1 |
k |
− |
ω |
r |
r 2 |
; |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
r |
|
|
|
|
|
r r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ur 2 = |
|
|
|
− 1 |
|
|
− kr Rr is2 + pψ r 2 + (ω k − ω r )ψ r1, |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Tr |
|
ψ r 2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де R = |
R |
|
+ k |
2 R |
|
– еквівалентний активний опір двигуна. |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
l |
s |
|
|
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Доповнюючи (3.19) |
відповідним |
|
рівнянням |
|
електромагнітного моменту |
|||||||||||||||||||||||||||||||||||||||||
(табл.3.1) і рівнянням руху (3.10), можна побудувати структурну схему АД (рис.3.5). На схемі позначено:
Tl = σ Ls  Rl – еквівалентна електромагнітна стала часу статора АД.
Rl – еквівалентна електромагнітна стала часу статора АД.
1 |
|
Kr/Tr |
3 |
|
|
|
|
PSIr1 |
|
|
|
Us1 |
|
1/Rl |
|
|
|
Kr |
|
|
|
||
|
Kr*Rr |
Tr |
|
|
|
|
|
Tl.s+1 |
|
|
|
|
|
|
|
|
|
4 |
|
|
Tr.s+1 |
6 |
|
|
|
|
Mc |
|
|
Ur1 |
|
1 |
|
|
|
|
|
|
|
||
|
|
Is1 |
|
|
|
|
|
|
3/2*Zp*Kr |
1 |
6 |
3 |
o*Ls |
|
J.s |
||
|
Kr |
w |
|||
Wk |
|
|
|||
|
|
Wr |
|
||
|
|
Zp |
|
||
|
|
|
|
|
|
|
|
2 |
|
5 |
|
|
|
|
M |
|
|
|
|
Is2 |
|
|
|
|
|
|
|
|
Ur2 |
|
|
Tr |
|
|
1/Rl |
Tr.s+1 |
|
|
|
|
|
||
5 |
Kr |
Kr*Rr |
|
|
|
|
|||
|
|
Tl.s+1 |
PSIr2 |
|
2 |
|
|
|
|
|
Kr/Tr |
4 |
|
|
Us2 |
|
|
||
|
|
~ |
~ |
|
|
|
|
||
|
Рисунок 3.5 – Структурна схема АД у відповідності до структури Is , Ψ |
r |
||
В цьому випадку також за необхідності може бути передбачений блок обчис- лення сигналів складових струму ротора і потокозчеплення статора, складений за
(3.17).
Виведення рівнянь і побудування структурних схем моделей, що відповідають іншим структурам, виконується аналогічним чином. Будь-яка з таких моделей мо- жуть бути застосовані, якщо частота обертання ω k системи координат задана явно. Звичайно, якщо задана певна швидкість обертання (наприклад, ω k = 0 ) або відомо, що роторні обмотки АД замкнені накоротко ( ur1 = ur 2 = 0 ; ) розглянуті моделі мо- жуть бути дещо спрощені відкиданням зайвих зв’язків. Бажано у таких випадках ви- користовувати традиційні позначення систем координат.
Розглянемо принцип орієнтації системи координат на прикладі орієнтації за
|
~ |
~ |
вектором потокозчеплення ротора і використанні структури моделі |
Is , Ψ |
r . Тради- |
ційне позначення такої системи координат – d,q.
|
~ |
~ |
(3.19). Умову обертання системи |
Початковими є рівняння структури |
Is , Ψ |
r |
31

координат оберемо у вигляді: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ψ |
rd |
= |
Ψ~r |
|
= |
Ψ |
r , |
|
ψ |
|
|
rq = |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
(3.20) |
|
|||||
Тобто, дійсна вісь системи координат d жорстко сполучена із напрямком вектора |
||||||||||||||||||||||||||||||||
потокозчеплення ротора як у перехідних, так і в усталених режимах роботи – систе- |
||||||||||||||||||||||||||||||||
ма координат орієнтована за вектором Ψ~r . |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
Використавши у (3.19) відповідні нові індекси, і підставивши (3.20), після пе- |
||||||||||||||||||||||||||||||||
ретворень отримаємо: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
usd |
− kr urd |
= Rl isd |
|
+ σ Ls pisd |
+ σ Lsω |
k isq |
− krTr− 1Ψ r ; |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||
usq |
− |
kr urq |
= |
Rl isq |
|
+ |
σ Ls pisq |
+ σ Lsω |
k isd |
+ krω |
rΨ |
r ; |
|
|
(3.21) |
|
||||||||||||||||
u |
|
= |
T |
− 1Ψ |
|
|
− |
k |
|
R |
|
|
i |
|
+ pΨ |
|
; ω |
|
= |
ω |
|
+ urq + kr Rr isq |
|
|
|
|
||||||
rd |
r |
r |
r |
sd |
r |
k |
r |
. |
|
|
|
|||||||||||||||||||||
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ |
r |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Останнє рівняння (3.21) є умовою точної орієнтації за вектором потокозчеп- |
||||||||||||||||||||||||||||||||
лення ротора. Складова |
|
urq + |
kr Rrisq |
|
в усталених режимах дорівнює абсолютному |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ковзанню двигуна β |
= |
ω |
|
s − ω r . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Відповідне рівняння електромагнітного моменту (табл.3.1) з урахуванням |
||||||||||||||||||||||||||||||||
(3.20) буде мати простий вигляд: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
M = |
|
3 z |
p |
k Ψ |
i |
sq |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.22) |
|
|||||
|
|
|
2 |
|
|
r |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Доповнивши (3.21), (3.22) рівнянням руху (3.10), можна побудувати структур- |
||||||||||||||||||||||||||||||||
ну схему АД в системі координат, орієнтованій за вектором потокозчеплення ротора |
||||||||||||||||||||||||||||||||
(рис.3.6). При обчисленні умови орієнтації з метою виключення випадку ділення на |
||||||||||||||||||||||||||||||||
нуль до сигналу Ψ |
|
r прибавлена мала константа. |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kr/Tr |
|
|
|
|
|
|
|
|
3 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PSIr |
Mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
1/Rl |
|
|
|
|
|
|
|
|
|
|
|
Tr |
|
|
|
|
|
||||||
Usd |
|
|
|
|
|
|
|
|
|
|
|
|
|
Kr*Rr |
|
|
|
|
|
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3/2*Zp*Kr |
|
5 |
|||||
|
|
|
|
|
|
|
|
|
Tl.s+1 |
|
|
|
|
|
|
|
|
Tr.s+1 |
|
|
|
|||||||||||
|
Kr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J.s |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
6 |
|
4 |
|
|
Urd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Isd |
|
|
|
|
|
|
|
|
|
Wk |
|
M |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
o*Ls |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wr |
Zp |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Constant |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Isq |
eps |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Urq |
Kr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/Rl |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kr*Rr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Tl.s+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Usq |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3.6 – Структурна схема АД в системі координат, |
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
орієнтованій за вектором потокозчеплення ротора |
|
|
|
||||||||||||||||||||||
32

Обчислення амплітудного значення електромагнітної величини (напруги, струму, потокозчеплення) за відомими сигналами складових слід виконувати за фо- рмулою:
Y |
|
= |
|
~ |
|
= |
y 2 |
+ |
y |
2 . |
(3.23) |
|
|
|
|||||||||
fm |
|
Y |
|
||||||||
|
|
|
|
|
|
1 |
|
|
2 |
|
3.4Контрольні запитання
1.Які особливості математичного опису АД в ортогональних координатах у порівнянні із описом у фазних координатах?
2.У чому переваги використання моделі АД в ортогональних координатах?
3.Як отримуються рівняння АД, записані через складові?
4.Яким чином повинна визначатися структура моделі, що має бути викорис- тана, при вирішенні задач керування?
5.Що таке умова обертання та умова орієнтації системи координат?
6.Які переваги використання при моделюванні АД орієнтованих систем коор-
динат?
7.Перелічіть можливі області застосування розроблених моделей.
4 Лабораторна робота № 4
МОДЕЛЮВАННЯ АСИНХРОННОЇ МАШИНИ ПРИ ЖИВЛЕННІ ВІД ДЖЕРЕЛА СТРУМУ
4.1 Теоретичні відомості
При застосуванні у силовій схемі асинхронного ЕП перетворювача енергії, який працює в режимі джерела струму (наприклад, перетворювач частоти на основі автономного інвертора струму), і живленні від нього обмоток статора досліджувано- го АД керуючим впливом для останнього є саме струм, що протікає у статорі. У цих випадках використовуються АД із короткозамкненим ротором, тому
Ur = [0 0 0] |
T |
~ |
(4.1) |
|
або U r = 0 . |
У такому випадку рівняння рівноваги напруг ротора можна вирішити незале- жно від рівнянь рівноваги напруг статора, які можуть бути або використані для об- числення сигналу напруги статора, або зовсім опущені. Джерело синусоїдного стру- му вважається ідеальним.
Математичний опис АД попередньо має бути приведений до структур, у які входить струм статора (у порядку зменшення розповсюдженості використання це
~ ~ |
~ |
~ |
~ |
~ |
|
|
структури I s , Ψ r ; |
I s , Ψ |
s ; |
I s , Ψ |
m ). |
|
|
Розглянемо математичний опис АД при живленні від ідеального джерела си- |
||||||
|
|
|
|
|
~ |
~ |
нусоїдного струму на прикладі структури |
I s , Ψ |
r , як найбільш розповсюдженої. |
||||
Із (1.1) з урахуванням (4.1) можна отримати рівняння рівноваги напруг ротора:
33
|
d Ψr |
= − R I |
r |
. |
(4.2) |
|
|
||||
|
d t |
r |
|
|
|
|
|
|
|
|
|
Із (1.2) можна отримати вираз для струму ротора: |
|
||||
Ir = L−rr1 (Ψr − LrsIs ) . |
(4.3) |
||||
Якщо доповнити (4.2), (4.3) рівнянням електромагнітного моменту (1.10а) та рівнянням руху (1.11а), отримаємо повний математичний опис АД у фазних коорди- натах при живленні від джерела струму.
За необхідності фазні миттєві значення напруги статора можуть бути отримані за матричним рівнянням:
Us = [Rs + (Lss − LsrL−rr1Lrs )p]Is + LsrL−rr1 pΨr . |
(4.4) |
Математичний опис у довільній ортогональній системі координат отримаємо із (3.18):
− 1 |
− kr Rr is1 + |
pψ r1 − (ω k − ω r )ψ r 2 = |
|
|
|
Tr |
ψ r1 |
0; |
(4.5) |
||
− 1 |
− kr Rr is2 + |
pψ r 2 + (ω k − ω r )ψ r1 = |
|
||
|
|
||||
Tr |
ψ r 2 |
0. |
|
||
Рівняння (4.5) слід доповнити відповідним рівнянням електромагнітного мо- менту (табл.3.1) і рівнянням руху (3.10).
За необхідності сигнали складових напруги статора можуть бути отримані за двома першими рівняннями (3.18).
Якщо ортогональна система координат повинна бути орієнтованою, то пере- творення математичного опису виконується повністю аналогічно такому при засто- суванні напругових моделей.
4.2 Завдання
Складіть структурні схеми АД з короткозамкненим ротором у фазних та орто- гональних координатах для випадку живлення АД від ідеального джерела синусоїд- ного струму. Параметри АД взяти з табл.1.1, структуру моделей та кутову швидкість обертання ортогональної системи координат – з табл.4.1 відповідно до номеру варі- анту.
Виконайте моделювання прямому пуску АД, накиду та скиду номінального на- вантаження. Завдання струмів статора АД виконуйте за допомогою відповідної на- пругової моделі.
Виконайте орієнтування системи координат за вектором потокозчеплення, що входить до структури моделі. Повторіть моделювання указаних режимів.
У всіх випадках отримуйте залежності миттєвих (складових) та амплітудних значень електромагнітних величин, що відповідають структурі моделі, а також елек- тромагнітного моменту та частоти обертання ротора АД в функції часу, порівнюйте сигнали з виходу струмової моделі із відповідними сигналами напругової моделі.
34

Таблиця 4.1 – Завдання до лабораторної роботи 4
№ |
Структура |
ω |
k |
№ |
Структура |
ω k |
№ |
Структура |
ω |
k |
||||
вар. |
моделі |
вар. |
моделі |
вар. |
моделі |
|||||||||
|
|
|
|
|
||||||||||
1 |
~ |
~ |
|
0 |
4 |
~ |
~ |
0 |
7 |
~ |
~ |
|
0 |
|
2 |
ω |
|
5 |
ω s |
8 |
ω s |
||||||||
I s , Ψ |
s |
s |
I s , Ψ |
r |
I s , Ψ |
m |
||||||||
3 |
|
|
ω |
r |
6 |
|
|
ω r |
9 |
|
|
ω |
r |
|
Примітка. У варіантах 7 – 9 модель у фазних координатах складати за структурою
~ |
~ |
I s , Ψ |
r . |
4.3 Методичні вказівки та рекомендації до виконання роботи
Струмова трифазна Simulink-модель короткозамкненого АД, що складена за рівняннями (1.10а), (1.11а), (4.2), (4.3), зображена на рис.4.1.
Is_ABC |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
PSIr_abc |
Mc |
|
|
|
|
|
|
|
|
|
|
1 |
MA TLAB |
MA TLAB |
|
1 |
Zp |
|
Function |
|
J.s |
s |
tetar |
||
|
Function |
|
||||
s |
|
|
|
|||
Zp Ir B PSIr |
w |
|
|
|||
|
|
|
||||
|
inv (Lrr)*(PSIr - Lrs Is) |
|
|
|||
|
|
3 |
4 |
|
|
|
|
|
Ir_abc |
|
|
||
|
|
|
|
|
|
|
-Rr |
|
2 |
M |
|
|
|
|
|
|
|
|
||
Рисунок 4.1 – Модель АД з короткозамкненим ротором при живленні статора від джерела струму у фазних координатах
Для реалізації матричної формули (4.3) треба створити Matlab-функцію, текст якої може мати вигляд:
function Ir = name3(u)
global Lm |
Err |
|
is=u(1:3); |
psir=u(4:6); tetar=u(7); |
|
is=is(:); |
psir=psir(:); |
|
c1=cos(tetar); |
c2=cos(tetar+2*pi/3); c3=cos(tetar+4*pi/3); |
|
Lrr=[ Err |
-1/2 |
-1/2; |
-1/2 |
Err |
-1/2; |
-1/2 |
-1/2 |
Err]*2/3*Lm; |
Lrs=[c1 c3 |
c2; |
|
c2 c1 |
c3; |
|
c3 c2 |
c1]*2/3*Lm; |
|
Ir=Lrr\(psir-Lrs*is);
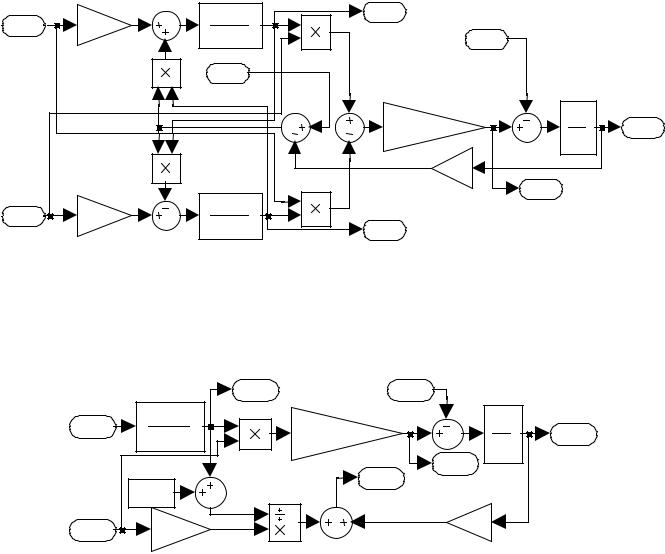
Модель АД у ортогональній системі координат, що обертається з довільною швидкістю ω k , складена за формулами (3.10), (4.5) і відповідним рівнянням елект- ромагнітного моменту (табл.3.1), наведена на рис.4.2.
35
1 |
Tr |
1 |
|
|
Kr*Rr |
PSIr1 |
4 |
||
Is1 |
Tr.s+1 |
|||
|
||||
|
|
Mc |
||
|
3 |
|
||
|
|
|
||
|
Wk |
|
|
|
|
3/2*Zp*Kr |
1 |
4 |
|
|
|
||
|
|
|
J.s |
w |
|
|
Wr |
|
|
|
|
Zp |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
Tr |
PSIr2 |
M |
|
2 |
Kr*Rr |
|
||
2 |
|
|
||
Is2 |
Tr.s+1 |
|
|
|
|
|
|
|
Рисунок 4.2 – Модель АД з короткозамкненим ротором при живленні статора від джерела струму у довільній ортогональній системі координат
Модель АД у системі координат, орієнтованій за вектором потокозчеплення ротора, може бути отримана шляхом, наведеним у п.3.3, і має вигляд, показаний на рис.4.3.
|
|
1 |
3 |
|
|
1 |
Lm |
PSIr |
Mc |
1 |
|
|
3/2*Zp*Kr |
|
3 |
||
|
|
|
|||
|
Tr.s+1 |
|
|
||
Isd |
|
|
J.s |
w |
|
|
|
2 |
|||
|
|
|
|
||
|
|
|
|
|
|
eps |
4 |
|
M |
|
Wk |
|
||
|
|
|
||
|
|
Wr |
|
|
2 |
Kr*Rr |
|
Zp |
|
|
|
|||
|
|
|
||
Isq |
|
|
|
|
Рисунок 4.3 – Модель АД з короткозамкненим ротором при живленні статора від джерела струму у системі координат, орієнтованій за вектором Ψ~ r
У разі необхідності будь-яка струмова модель АД може бути доповнена відпо- відними вузлами обчислення складових напруги статора та змінних, що не визнача- ють структуру моделі (у розглянутому випадку це струм ротора і потокозчеплення статора), за формулами, наведеними вище.
Діючі (ефективні) значення фазних величин знаходяться з ортогональних про- екцій узагальнених векторів за формулою (3.23).
4.4Контрольні запитання
1.Яким чином отримується математичний опис АД при живленні від джерела
струму?
2.Чому завдання сигналів складових струму статора виконується за допомо- гою напругової моделі? Які графіки будуть отримані при завданні складових стру- мів за допомогою кожного з блоків бібліотеки Sources?
3.Як конструктивно відрізняються напругові і струмові Simulink-моделі?
4.Перелічіть можливі області застосування розроблених моделей.
36

5 Лабораторна робота № 5
ДОСЛІДЖЕННЯ СТАТИЧНИХ ХАРАКТЕРИСТИК ТА УСТАЛЕНИХ РЕЖИМІВ РОБОТИ АСИНХРОННОГО ДВИГУНА
5.1 Теоретичні відомості
Для отримання рівнянь АД, які зв’язують координати в усталених режимах, слід у рівняннях (3.2) положити ω k = ω s = 2π f s та d dt = 0 :
dt = 0 :
~ |
|
= |
~ |
|
|
+ |
jω |
|
~ |
|
|
|
|
|
|
|
|
|||
U s |
I s Rs |
sΨ s ; |
|
|
|
|
|
|
(5.1) |
|||||||||||
~ |
|
= |
~ |
|
|
+ j(ω s − ω |
~ |
|
|
|
||||||||||
|
|
|
|
|
|
|
||||||||||||||
U r |
Ir Rr |
r )Ψ r . |
|
|
|
|||||||||||||||
Підставивши (3.3) у рівняння (5.1), отримаємо: |
|
|||||||||||||||||||
~ |
|
= |
(Rs + |
|
jX s ) |
~ |
+ |
|
|
|
~ |
|
|
|
|
|||||
U s |
|
I s |
|
|
jX m Ir ; |
|
||||||||||||||
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.2) |
|
|
|
|
R |
|
|
|
|
~ |
|
|
|
|
~ |
|
||||||
U |
r |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
|
r |
|
+ |
jX |
r |
I |
r |
+ |
jX |
m |
I |
, |
|
||||
|
|
|
|
|
||||||||||||||||
|
s |
|
|
s |
|
|
|
|
|
|
|
|
s |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
де X s = X m + X sσ , X r = X m + X rσ ; |
|
|||||||||||||||||||
s – ковзання двигуна: |
|
|
|
|
|
|
|
|
||||||||||||
s = |
ω |
s − ω |
r |
= |
ω |
0 − |
ω |
|
|
. |
|
|
|
|
(5.3) |
|||||
|
|
ω 0 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
ω |
s |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Системі рівнянь (5.2) відповідає схема заміщення АД, зображена на рис.5.1.
Rs |
|
jX sσ |
jX rσ |
Rr s |
|
|
~ |
~ |
~ |
|
|
~ |
I s |
~ |
|
||
Im |
Ir |
|
|||
U s |
|
|
jX m |
U r |
s |
Рисунок 5.1 – Еквівалентна схема заміщення АД
На підставі еквівалентної схеми заміщення з використанням метода накладан- ня можна отримати вирази для струмів статора і ротора:
~ |
|
~ |
|
|
|
|
~ |
|
|
|
|
jX |
|
|
|
|
|
|
|||||
|
|
U |
s |
|
|
U |
r |
|
|
m |
|
|
|
||||||||||
I s = |
|
|
|
|
− |
|
|
|
|
; |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Z 0s |
sZ 0r |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
Rs + jX s |
|
|
(5.4) |
|||||||||||||
~ |
|
~ |
|
|
|
~ |
|
|
|
jX |
|
|
|
|
|||||||||
= |
|
U |
r |
|
− |
|
U |
s |
|
|
m |
, |
|
|
|||||||||
I |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
sZ 0r |
|
Z 0s |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
RR s + jX R |
|
|||||||||||||||
де Z 0s , Z 0r – комплексні опори АД відповідно при замкнених накоротко обмотках ротора (з боку статора) та статора (з боку ротора):
37

Z 0s
Z 0r
|
|
|
|
Rr |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Rr s) |
2 |
+ X r X rσ |
|
|||||||||
= |
R |
|
+ |
|
|
|
|
|
X m |
|
|
|
|
+ |
j X |
|
|
+ |
X |
|
|
|
|
; |
|||||||||||||||
|
|
(R s) 2 + |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
s |
|
s |
|
X |
2 |
|
|
|
|
|
sσ |
|
|
|
m |
|
|
(R s) 2 + |
X |
2 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
r |
|
(5.5) |
|
|
R |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
+ |
|
|
|
|
|
|
|
|
|
|
||||
= |
+ |
|
|
|
|
|
X |
|
+ |
|
|
|
|
+ |
|
|
|
|
R |
X |
s |
X |
sσ |
|
|
|
|
|
|||||||||||
|
|
r |
R |
|
|
|
|
m |
|
|
|
j X |
rσ |
X |
|
|
|
s |
|
|
|
|
|
. |
|
|
|
|
|||||||||||
|
|
|
|
|
+ |
X |
|
|
|
|
|
R |
|
+ |
X 2 |
|
|
|
|
||||||||||||||||||||
|
s |
|
s R |
2 |
2 |
|
|
|
|
|
|
|
|
|
m |
|
|
2 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
s |
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
s |
|
|
|
|
|
|
|||
Знаки “–” у (5.4) відображають відміну напрямків струмів при обчисленні від зображених на рис.5.1.
При розгляданні короткозамкнених двигунів, а також АД з фазним ротором, обмотки ротора якого замкнені накоротко безпосередньо або через додаткові актив- ні опори напруга, прикладена до ротора, дорівнює нулю:
~ |
, |
(5.6) |
U r = 0 |
і рівняння (5.4) можуть бути відповідно спрощені. В усіх інших випадках (а саме, при наявності у колі ротора АД джерела енергії) рівняння (5.6) не є справедливим.
Електромагнітний момент можна визначити приблизно за спрощеною
M = |
2M k |
||
s sk |
+ sk s |
||
|
|||
або уточненою
M = |
2M k (1 + ξ ) |
||
s sk |
+ sk s + 2ξ |
||
|
|||
формулами Клосса [3].
У формулах (5.7), (5.7а):
M k – критичний момент АД:
M k ≈ ± |
|
3U s2 |
|
|
; |
|||
|
2 |
+ |
2 |
± |
|
|||
4ω 0 |
|
|||||||
|
Rs |
X k |
Rs |
|
||||
|
|
|
|
|
|
|
|
|
sk – критичне ковзання АД:
(5.7)
(5.7а)
(5.8)
sk ≈ ± |
Rr |
|
; |
(5.9) |
Rs2 + |
|
|||
|
X k2 |
|
||
U s – амплітуда вектора напруги статора.
ξ = |
Rs |
= |
Rs sk ; |
|
Rs2 + |
X k2 |
Rr |
X k = |
X sσ |
+ X rσ |
– індуктивний опір короткого замикання. |
У (5.8), (5.9) знак “+” має місце у двигунному режимі, “–” – у генераторному. Однак, оскільки формули (5.7) – (5.9) містять певні похибки, більш доцільним
є використання формули [1]:
38
|
P |
|
|
3 |
|
I rfm2 Rr |
|
|
|
M = |
EM |
= |
|
|
|
, |
(5.10) |
||
|
|
sω |
|
||||||
|
ω |
0 |
|
2 |
|
0 |
|
|
|
де I rfm – амплітуда вектора фазного струму ротора.
Ковзання (швидкість обертання) АД може бути визначено після рішення рів- няння руху:
M − M C = J |
dω |
(5.11) |
|
dt |
|||
|
|
за формулою (5.3).
5.2 Завдання
Складіть структурну схему АД для дослідження усталених режимів роботи, та промоделюйте асинхронний двигун із короткозамкненим ротором. Параметри коро- ткозамкнених АД оберіть із табл.1.1.
Отримайте графіки перехідних процесів при прямому пуску АД, накиді та скиді номінального навантаження – залежності діючих значень струму статора, ро- тора та електромагнітного моменту та швидкості АД в функції часу – з урахуванням та без урахування електромагнітної інерції АД.
Отримайте статичні характеристики двигуна – залежності струмів статора і ротора, електромагнітного моменту в функції швидкості (або ковзання) АД.
Побудуйте графіки перехідних процесів, отримані за допомогою розробленої моделі, і відповідні графіки, отримані за допомогою моделі АД в ортогональній сис- темі координат, в одній системі координат. Аналогічним чином в одній системі ко- ординат побудуйте статичні і динамічні характеристики АД. Оцініть похибку, яку вносить обчислення сигналу електромагнітного моменту за допомогою формул Клосса.
Встановіть, як впливає на перехідні процеси, отримані за допомогою статичної моделі, зміна визначеного параметру (табл.5.1). Побудуйте в одній системі коорди- нат статичні характеристики АД при різних значеннях визначеного параметру.
Таблиця 5.1 – Параметри, вплив яких на статичні характеристики АД необхідно простежити
№ вар. |
Параметр |
№ вар. |
Параметр |
1, 11 |
Rs |
6, 16 |
z p |
2, 12 |
Rr |
7, 17 |
J дв |
3, 13 |
X sσ |
8, 18 |
U s |
4, 14 |
X m |
9, 19 |
ω s |
5, 15 |
X rσ |
10*, 20* |
U r |
* – варіанти виконуються за вказівкою викладача.
39