

Скорость
Полное описание движения материальной точки с помощью только вектора перемещения невозможно. Для характеристики движения материальной точки также вводят другую векторную физическую величину – скорость, определяющую как быстроту движения, так и направление движения в данный момент времени t.
Пусть
материальная точка движется по
криволинейной траектории MN
(см. рис. 1.3) так, что в момент времени t
она находится в точке M,
а в момент времени t
+ t
– в точке N. Радиус- вектора в точках M
и N
равны соответственно
![]() и
и
![]() ,
а длина дугиMN
равна лине пути S.
,
а длина дугиMN
равна лине пути S.
Вектором
средней скорости
![]() точки в интервале от t
до t
+ t
называется
точки в интервале от t
до t
+ t
называется
![]()
![]()
|
|
(1.1.3) |
Из
формулы (1.1.3) видно, что вектор средней
скорости
![]() сонаправлен
с вектором перемещения
сонаправлен
с вектором перемещения
![]() Еслиt
0, то
Еслиt
0, то
|
|
(1.1.4) |
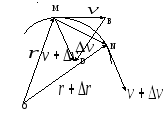
Рис. 1.3.
Схематическое изображение движения материальной точки
по криволинейной траектории
Вектор
мгновенной скорости в точке M
(см. рис. 1.3) направлен по касательной к
данной точки траектории. Из математики
известно, что при S
0 S/r
= 1 и, как следствие,
![]() В этом случае можно ввести понятие
путевой
скорости:
В этом случае можно ввести понятие
путевой
скорости:
![]() Из последнего выражения можно определить
путь, пройденный точкой за данный
промежуток времени:
Из последнего выражения можно определить
путь, пройденный точкой за данный
промежуток времени:![]() Необходимо отметить, что путевая скорость
- скалярная величина.
Необходимо отметить, что путевая скорость
- скалярная величина.
Поскольку
мгновенная скорость
![]() - векторная величина, то ее можно разложить
на три составляющие по осям координат,
то есть
- векторная величина, то ее можно разложить
на три составляющие по осям координат,
то есть
|
|
(1.1.5) |
Используя выражения (1.1.1) и (1.1.4), можно показать, что
|
|
(1.1.6) |
Сравнивая
выражения (1.1.5) и (1.1.6), можно определить
проекции вектора скорости на декартовые
оси координат:
![]()
![]()
![]() Последние позволяют рассчитать модуль
скорости в данный момент времени:
Последние позволяют рассчитать модуль
скорости в данный момент времени:
Рассмотрим некоторые частные случаи:
1.
Скорость материальной точки не зависит
от времени
![]() (равномерное
движение).
Поэтому для определения перемещения,
пройденного точкой, можно использовать
уравнение
(равномерное
движение).
Поэтому для определения перемещения,
пройденного точкой, можно использовать
уравнение
|
|
(1.1.7,а) |
а для определения пути
|
|
(1.1.7,б) |
2.
Скорость материальной точки является
функцией времени
![]() (неравномерное движение).
В этом случае
(неравномерное движение).
В этом случае
|
|
(1.1.8,а) |
а для пути
|
|
(1.1.8,б) |
где
![]() -
средняя путевая скорость – это скорость,
которая затрачивается для прохождения
путиS
за время t.
В случае прямолинейного движения
-
средняя путевая скорость – это скорость,
которая затрачивается для прохождения
путиS
за время t.
В случае прямолинейного движения
![]() и, как следствие,
и, как следствие,![]() .
В общем случае
.
В общем случае![]() и
и![]() .
.
В
системе СИ единицей измерения скорости
является
![]() Из закона
независимости движений следует закон
сложения скоростей:
Из закона
независимости движений следует закон
сложения скоростей:
Если материальная точка участвует в нескольких движениях, то результирующая скорость ее движения определяется как векторная сумма скоростей всех тех движений, в которых участвует материальная точка.
Ускорение
При
неравномерном движении, кроме скорости,
необходимо ввести другую характеристику
– ускорение
– меру быстроты изменения скорости.
Пусть материальная точка за время t
перешла из точки пространства M в точку
N, а вектор скорости
![]() изменился на
изменился на![]() - вектор
- вектор![]() (см.
рис. 1.3).Средним
ускорением
неравномерного движения в интервале
t
называется
(см.
рис. 1.3).Средним
ускорением
неравномерного движения в интервале
t
называется
![]() Вектор среднего ускорения сонапрален
с вектором изменения скорости
Вектор среднего ускорения сонапрален
с вектором изменения скорости![]() .
Ускорением илимгновенным
ускорением
точки в момент времени t
называется величина
.
Ускорением илимгновенным
ускорением
точки в момент времени t
называется величина
|
|
(1.1.9) |
Так как мгновенное ускорение – векторная величина, то
|
|
(1.1.10) |
Из
выражений (1.1.6) и (1.1.9) следует
 и,
как следствие:
и,
как следствие:
|
|
(1.1.11) |

Таким
образом, из (1.1.10) и (1.1.11) следует, что
 Модуль вектора ускорения равен
Модуль вектора ускорения равен

При
рассмотрении плоского движения удобно
пользоваться скользящей
системой координат –
системой, которая изменяет свое положение
в пространстве вместе с движением
материальной точки, то есть за начало
отсчета принимают саму движущуюся
точку. Одна ось вышеуказанной системы
направлена по касательной к траектории
движения материальной точки в данный
момент времени (тангенциальная
или касательная
ось
![]() ),
другая направлена перпендикулярно
первой, и называется нормальной
осью
),
другая направлена перпендикулярно
первой, и называется нормальной
осью
![]() (см.
рис. 1.4).
(см.
рис. 1.4).

Рис. 1.4.
Схематическое изображение скользящей системы координат
Рассмотрим
движение точки вдоль криволинейной
траектории MN
(см. рис.1.4). В скользящей системе координат
скорость материальной точки можно
представить как
![]() Из выражения (1.1.9) следует, что
Из выражения (1.1.9) следует, что
![]()
Таким образом, ускорение материальной точки представляет собой сумму двух векторов, первый из которых показывает быстроту изменение модуля скорости материальной точки (тангенциальное ускорение), второй – быстроту изменения направления скорости (нормальное ускорение) (см. рис.1.4):
|
|
(1.1.12) |
где
![]()
![]()
Покажем,
что нормальное ускорение направлено
по нормальной оси скользящей системы
координат. Если
![]() и
и![]() - единичные векторы осей скользящей
системы координат, то скалярное
произведение
- единичные векторы осей скользящей
системы координат, то скалярное
произведение![]() ,
а производная этой величины равна нулю.
С другой стороны
,
а производная этой величины равна нулю.
С другой стороны![]() .
Приравнивая полученное выражение к
нулю
.
Приравнивая полученное выражение к
нулю![]() ,
можно сделать вывод, что векторы
,
можно сделать вывод, что векторы![]() и
и![]() перпендикулярны друг другу (из определения
скалярного произведения). Следовательно,
нормальное ускорение перпендикулярно
тангенциальной оси и направлено по
нормальной оси скользящей системы
координат.
перпендикулярны друг другу (из определения
скалярного произведения). Следовательно,
нормальное ускорение перпендикулярно
тангенциальной оси и направлено по
нормальной оси скользящей системы
координат.
Для
определения физического смысла
нормального ускорения рассмотрим
равномерное
движение материальной точки по окружности
(см. рис. 1.5). В момент времени t1
скорость точки –
![]() ,
в момент t2
-
,
в момент t2
-
![]() .
При равномерном движении модуль скорости
остается постоянным (следовательно,
тангенциальное ускорение равно нулю:
.
При равномерном движении модуль скорости
остается постоянным (следовательно,
тангенциальное ускорение равно нулю:![]() ),
а направление вектора скорости меняется.
Изменение единичного вектора равно
),
а направление вектора скорости меняется.
Изменение единичного вектора равно![]() За малый промежуток времениdt
модуль вектора d
можно определить как d
= d,
где d
- угол поворота вектора скорости
материальной точки. Поскольку
= 1,
За малый промежуток времениdt
модуль вектора d
можно определить как d
= d,
где d
- угол поворота вектора скорости
материальной точки. Поскольку
= 1,
![]() Из рис.1.5 видно, что dr = Rd
(R
– радиус окружности). Поэтому
Из рис.1.5 видно, что dr = Rd
(R
– радиус окружности). Поэтому
![]() .
Из приведенных выше выводов следует,
что
.
Из приведенных выше выводов следует,
что
|
|
(1.1.13) |

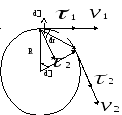

Рис. 1.5.
Схематическое изображение движения точки по окружности
При
прямолинейном движении нормальная
составляющая полного ускорения равна
нулю (так как
![]() и
и![]() ).
При равномерном движении по окружности,
как отмечалось выше,
).
При равномерном движении по окружности,
как отмечалось выше,![]() .
В общем случае при криволинейном движении
имеют место и тангенциальная и нормальная
составляющие полного ускорения, так
что можно определить модуль полного
ускорения:
.
В общем случае при криволинейном движении
имеют место и тангенциальная и нормальная
составляющие полного ускорения, так
что можно определить модуль полного
ускорения: Единицей измерения ускорения в системе
СИ является
Единицей измерения ускорения в системе
СИ является![]()
Простейшие виды движения материальной точки
1. Прямолинейное равномерное движение.
![]()
![]() причем
причем
![]() Поэтому
Поэтому
|
|
(1.1.14,а) |
где x0 – значение x в начальный момент времени (t = 0). Таким образом, для величины пути
|
|
(1.1.14,б) |
2. Прямолинейное равнопеременное движение.
an
= 0, a
= const.
При a
> 0 – движение равноускоренное; При a
< 0 – движение равнозамедленное;
![]() Из выражения (1.1.9) следует, что
Из выражения (1.1.9) следует, что
|
|
(1.1.15) |
где v0 – начальная скорость. Для координаты
|
|
(1.1.16,а) |

и пути
|
|
(1.1.16,б) |

Часто для простоты записи в выражениях (1.1.15), (1.1.16,а) и (1.1.16,б) вместо a используют a.
3.
Равномерное
движение по окружности
- наиболее простой вид криволинейного
движения. Так как численное значение
скорости в этом виде движения является
постоянной величиной,
![]() ,
то величина скорости может быть определена
через
,
то величина скорости может быть определена
через![]() с
помощью выражения (1.1.13).
с
помощью выражения (1.1.13).