1.2. Кинематика абсолютно твердого тела
Твердое тело может участвовать как в поступательном движении, так и во вращательном. Поскольку все точки твердого тела в поступательном виде движения имеют одни и те же кинематические характеристики: радиус-вектор, скорость, ускорение (см. определение абсолютно твердого тела (пп. 1.1)), то для описания положения тела в пространстве при поступательном движении в любой момент времени можно пользоваться кинематическими уравнениями, полученными для материальной точки, принимая за нее любую точку тела (см. формулы в пп. 1). При вращательном движении радиус-вектор, путь, скорость и ускорения различных точек тела отличаются друг от друга. Поэтому вышеперечисленные характеристики каких-либо точек твердого тела при вращательном движении не могут служить кинематическими характеристиками всего тела.
Пусть
точка О – центр вращения тела, а ОО’ –
неподвижная ось вращения (см. рис. 1.6).
Положение точки M
можно задать с помощью радиуса–вектора
![]() .
Из рис.1.6 видно, что
.
Из рис.1.6 видно, что![]() ,
где
,
где![]() -
радиус-вектор, проведенный в точкуM
из центра окружности, по которой точка
M
движется, в момент времени t.
За время dt
вектор
-
радиус-вектор, проведенный в точкуM
из центра окружности, по которой точка
M
движется, в момент времени t.
За время dt
вектор![]() повернется на уголd
(угол между векторами
повернется на уголd
(угол между векторами
![]() и
и![]() ,
где
,
где![]() - радиус-вектор, проведенный в точкуM
из центра окружности в момент времени
t
+dt).
Угол d
- характеризует перемещение всего
вращающегося тела. Удобно ввести вектор
- радиус-вектор, проведенный в точкуM
из центра окружности в момент времени
t
+dt).
Угол d
- характеризует перемещение всего
вращающегося тела. Удобно ввести вектор
![]() элементарного поворота тела, численно
равный углу поворота d
и направлен вдоль оси вращения OO’
так, что из его конца поворот тела был
виден проходящим против часовой стрелки
(см. рис. 1.6). Направление вектора
элементарного поворота тела, численно
равный углу поворота d
и направлен вдоль оси вращения OO’
так, что из его конца поворот тела был
виден проходящим против часовой стрелки
(см. рис. 1.6). Направление вектора
![]() совпадает
с направлением поступательного движения
буравчика. Если тело одновременно
участвует в нескольких вращательных
движениях, то результирующий вектор
угла поворота равен векторной сумме
векторов поворота, совершаемых телом
за тоже время в каждом из движений
отдельно:
совпадает
с направлением поступательного движения
буравчика. Если тело одновременно
участвует в нескольких вращательных
движениях, то результирующий вектор
угла поворота равен векторной сумме
векторов поворота, совершаемых телом
за тоже время в каждом из движений
отдельно:
![]() -
закон
независимости движений.
Для измерения угла поворота в системе
СИ используют единицу измерения –
радиан.
-
закон
независимости движений.
Для измерения угла поворота в системе
СИ используют единицу измерения –
радиан.
Угловая скорость
Угловой
скоростью тела называют вектор
![]() , численно
равный первой производной угла
по времени, направленный вдоль оси
вращения по правилу буравчика, так же
как вектор
, численно
равный первой производной угла
по времени, направленный вдоль оси
вращения по правилу буравчика, так же
как вектор
![]() :
:
|
|
(1.2.1) |
Угловая
скорость
![]() (единица измерения в СИ -
(единица измерения в СИ -![]() )
характеризует направление и быстроту
вращения тела вокруг оси. Если
)
характеризует направление и быстроту
вращения тела вокруг оси. Если![]() то движение называют равномерным
вращением вокруг неподвижной оси.
то движение называют равномерным
вращением вокруг неподвижной оси.
Скорость
![]() произвольной
точкиM
тела, вращающегося с угловой скоростью
произвольной
точкиM
тела, вращающегося с угловой скоростью
![]() ,
часто называют линейной скоростью этой
точки. За время dt точка M проходит путь
dS = vdt
= d
(см. рис. 1.7). Поэтому
,
часто называют линейной скоростью этой
точки. За время dt точка M проходит путь
dS = vdt
= d
(см. рис. 1.7). Поэтому
![]()
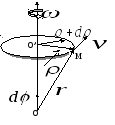
Рис. 1.6.
Вращательное движение твердого тела относительно мгновенной оси OO’

Рис. 1.7.
Схематическое изображение вращения точки M твердого тела
относительно центра O’
Из
рис. 1.6 следует, что вектор
![]() перпендикулярен как вектору
перпендикулярен как вектору![]() ,
так и вектору
,
так и вектору![]() ,
и направлен в ту же сторону, что и
результат векторного произведения
,
и направлен в ту же сторону, что и
результат векторного произведения![]() Таким образом,
Таким образом,
|
|
(1.2.2,а) |
Модуль
линейной скорости
![]() .
Учтем, что
.
Учтем, что![]() и,
как следствие,
и,
как следствие,![]() ,
иv
= .
Следует отметить, что связь между
линейной и угловой скоростью точки M
твердого тела можно определить и через
радиус - вектор. Действительно,
,
иv
= .
Следует отметить, что связь между
линейной и угловой скоростью точки M
твердого тела можно определить и через
радиус - вектор. Действительно,
![]() (см. рис. 1.6). Поэтому выражение (1.2.2,а)
можно преобразовать, так что:
(см. рис. 1.6). Поэтому выражение (1.2.2,а)
можно преобразовать, так что:![]()
![]() .
Так как
.
Так как![]() ,
то
,
то
![]() и, окончательно
и, окончательно
|
|
(1.2.2,б) |
Наряду с угловой скоростью используют понятия периода вращения (T) и частоты (n). Периодом вращения T называют промежуток времени, в течении которого тело равномерно вращаясь с угловой скоростью , совершает один оборот, то есть = . Частотой вращения n называют число оборотов , совершаемых телом за 1 секунду при равномерном вращении. Связь между угловой скоростью, периодом и частотой представлена в выражении:
|
|
(1.2.3) |
Угловое ускорение
Для
характеристики неравномерного вращения
твердого тела вводится понятие углового
ускорения
![]() - меры быстроты изменения угловой
скорости (в СИ единицей углового ускорения
является
- меры быстроты изменения угловой
скорости (в СИ единицей углового ускорения
является![]() ):
):
|
|
(1.2.4,а) |
В
случае вращения тела вокруг неподвижной
оси изменение
![]() обусловлено только изменением численного
его значения. При этом (см. рис. 1.6, 1.8)
обусловлено только изменением численного
его значения. При этом (см. рис. 1.6, 1.8)

Направим
ось OZ
по оси вращения OO’(см.
рис. 1.8), при этом проекция вектора
![]() на осьOZ
на осьOZ
 .
Если единичный вектор осиOZ
-
.
Если единичный вектор осиOZ
-
![]() то z
=
и
то z
=
и
|
|
(1.2.4,б) |
 .
.
Ускорение![]() произвольной
точкиM
тела, вращающегося с угловым ускорением
произвольной
точкиM
тела, вращающегося с угловым ускорением
![]() ,
называютлинейным
ускорением
этой точки. Согласно выражению (1.1.12)
линейное ускорение представляет собой
векторную сумму тангенциального и
нормального ускорений точки M
твердого тела, причем
,
называютлинейным
ускорением
этой точки. Согласно выражению (1.1.12)
линейное ускорение представляет собой
векторную сумму тангенциального и
нормального ускорений точки M
твердого тела, причем
![]() аv
=
(см. (1.2.2,а)) и, как следствие,
аv
=
(см. (1.2.2,а)) и, как следствие,
![]() Что касается нормального ускорения
Что касается нормального ускорения ,
то с учетом уравнения (1.2.2,а) можно
получить:
,
то с учетом уравнения (1.2.2,а) можно
получить: Таким образом, модуль линейного ускорения
равен
Таким образом, модуль линейного ускорения
равен
|
|
(1.2.5) |

Рис. 1.8
Схематическое представление линейных и угловых характеристик точки M
твердого тела, вращающегося относительно оси OO’.
Из
рис. 1.8 следует, что вектор тангенциального
ускорения
![]() ,
сонаправленный с вектором линейной
скорости
,
сонаправленный с вектором линейной
скорости![]() ,
перпендикулярен как вектору
,
перпендикулярен как вектору![]() ,
так и вектору
,
так и вектору![]() ,
и направлен в ту же сторону, что и
результат векторного произведения
,
и направлен в ту же сторону, что и
результат векторного произведения![]() Таким образом,
Таким образом,
|
|
(1.2.6,а) |
С
учетом того, что
![]() (см. рис. 1.8), можно показать:
(см. рис. 1.8), можно показать:
|
|
(1.2.6,б) |
Нормальное
ускорение направлено противоположно
радиусу - вектору
![]() проведенному в точкуM
из центра окружности (по которой движется
точка M)
(см. рис. 1.8). Поэтому
проведенному в точкуM
из центра окружности (по которой движется
точка M)
(см. рис. 1.8). Поэтому
|
|
(1.2.6,в) |

где
![]() -
единичный вектор, направленный по
радиусу - вектору
-
единичный вектор, направленный по
радиусу - вектору![]()
Простейшие виды вращательного движения твердого тела относительно оси OZ OO’
1. Равномерное вращение.
![]() ,
z
=
= const
> 0. При этом (см. (1.2.1))
,
z
=
= const
> 0. При этом (см. (1.2.1))
|
|
(1.2.7) |
где 0 – значение в начальный момент времени (t = 0).
2. Равнопеременное вращение относительно оси OZ.
z = const. При z > 0 – вращение равноускоренное; При z < 0 – вращение равнозамедленное; z = = const > 0. Из выражения (1.2.4,б) следует, что
|
|
(1.2.8) |
где 0 – начальная скорость. Кроме того,
|
|
(1.2.9) |
 .
.
Часто для простоты записи в выражениях (1.2.8) и (1.2.9) вместо z используют .
В целом полученные выше сведения по кинематике можно занести в таблицу аналогий:
|
Поступательное движение |
Вращательное движение |
Формулы связи |
|
|
|
S = |
|
|
|
|
|
|
|
|
|
Равномерное движение | ||
|
|
|
|
|
Равнопеременное движение | ||
|
|
|
|