

Федеральное агентство по образованию РФ
Пермский государственный технический университет
КАФЕДРА «Механика композиционных материалов и конструкций».
Курсовой проект по теории механизмов и машин
Тема: Гидромотор
Задание: 4Д
Вариант: 3
Выполнил: студент Филипьев А.В. группы ТМО-12в
Проверил: профессор
Поезжаева Е.В.
Березники 2014 г.
Содержание:
Введение
Структурный анализ кривошипно-ползунного механизма
Кинематический анализ механизма
Кинетостатический анализ механизма
Динамический анализ механизма и расчёт маховика
Синтез кулачкового механизма
Построение эвольвентного зубчатого зацепления
Указания к расчёту механизма на ЭВМ
Заключение
10.Список литературы
Введение
Рационально спроектированная машина должна удовлетворять социальным требованиям безопасности обслуживающего персонала, а также эксплутационным, экономическим, технологическим и производственным требованиям.
Проект содержит задачи по исследованию и проектированию машин, состоящих из сложных (роботов и манипуляторов) и простых в структурном отношении механизмов(шарнирно-рычажных, кулачковых, зубчатых, и др.).
Курсовое проектирование способствует закреплению, углублению и обобщению теоретических данных, а также применению этих знаний к комплексному решению конкретной инженерной задачи по исследованию и расчёту механизмов и машин, кроме того прививает некоторые навыки научно-исследовательской работы.
В состав большинства проектных заданий входят, кроме шарнирно-рычажных механизмов, кулачковые, зубчатые и трансмиссионные механизмы-приводы, предназначенные для передачи движения к исполнительным органам.
Цель курсового проектирования привить навыки использования общих методов проектирования и исследования механизмов для создания конкретных машин и приборов разнообразного назначения.
Курсовое проектирование ставит задачи:
оценка соответствия структурной схемы механизма основным условиям работы машины или прибора;
проектирование структурной и кинематической схемы рычажного механизма по основным и дополнительным условиям;
силовой анализ механизма с учётом геометрии масс звеньев при движении их с ускорением; защита механизмов и машин от механических колебаний; определение мощности и выбор типа двигателя;
анализ режима движения механизма при действии заданных сил и расчёт маховика;
проектирование механизмов с прерывистым движением выходного звена;
проектирование зубчатых рядовых, планетарных механизмов и расчёт оптимальной геометрии зубчатых зацеплений;
уравновешивание механизмов с целью уменьшения динамических нагрузок на фундамент и уменьшения сил в кинематических парах.
При разработке комплексного задания на курсовой проект используются характерные механизмы, при проектировании которых усваиваются важнейшие методы синтеза и анализа механизмов.
Целесообразность принятия конкретных решений при проектировании механизмов обосновываются функциональным назначение данной машины.
Структурный анализ кривошипно-ползунного механизма
1.Изобразим структурную схему механизма
Звено 1- кривошип – совершает вращательное движение;
Звено 2 –шатун – совершает поступательное движение;
Звено3- ползун – совершает поступательное движение.
О, А, В, В' – кинематические пары.
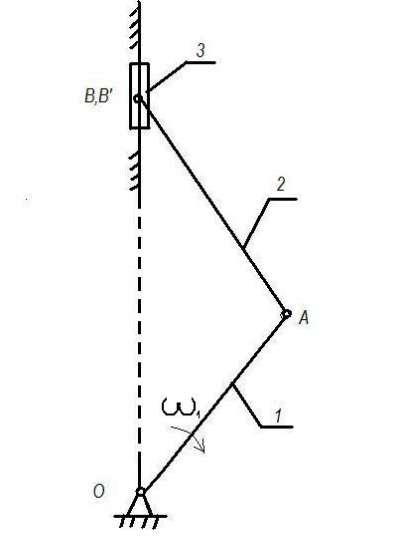
Рис 1. Кривошипно-ползунный механизм.
2. Найдём степень подвижности механизма по формуле Чебышева: W = 3n — 2p5 — 1p4
n - число подвижных звеньев;
p5 - число кинематических пар 5-ого класса;
p4 — число кинематических пар 4-ого класса;
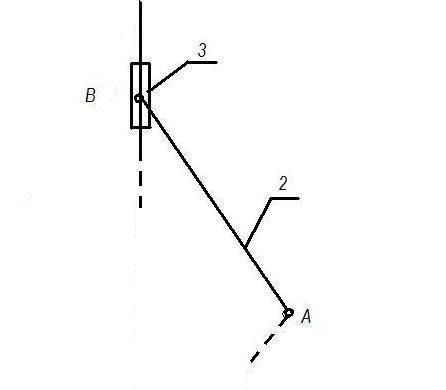
3.Разложим механизм на структурные группы Ассура и входное (ведущее) звено
W = 3n — 2p5 = 3*2 — 2*3 = 0
Рис.2 Структурная группа второго класса второго порядка.
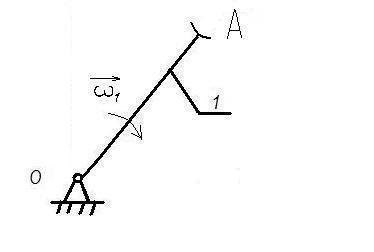
W = 3n — 2p5 = 3*1 — 2*1 = 1
4.Запишем структурную формулу механизма 1 -- 222
5.Определим класс, порядок всего механизма.
Исследуемый механизм состоит из механизма первого класса и структурной группы (шатун и ползун), второго класса второго порядка, следовательно, механизм О, А, В, В' - механизм второго класса второго порядка.