

kontemirov
.pdfПередаточные функции W1 и W2 будут иметь вид
;
;
;
.
Так как интегрирующая и дифференциальная составляющие из условия расчёта равны нулю(C0 = С2 = 0),следовательно, при помощи пакета MATLAB (рисунок 7.2) подбираем
пропорциональную составляющую  .
.
Рисунок 7.2 – Модель одноконтурной АСР в пакете Simulink
Из рисунка 7.3 видно, что период автоколебаний, при котором АСР находится на границе устойчивости, равен: T = 87 сек.
рад/с.
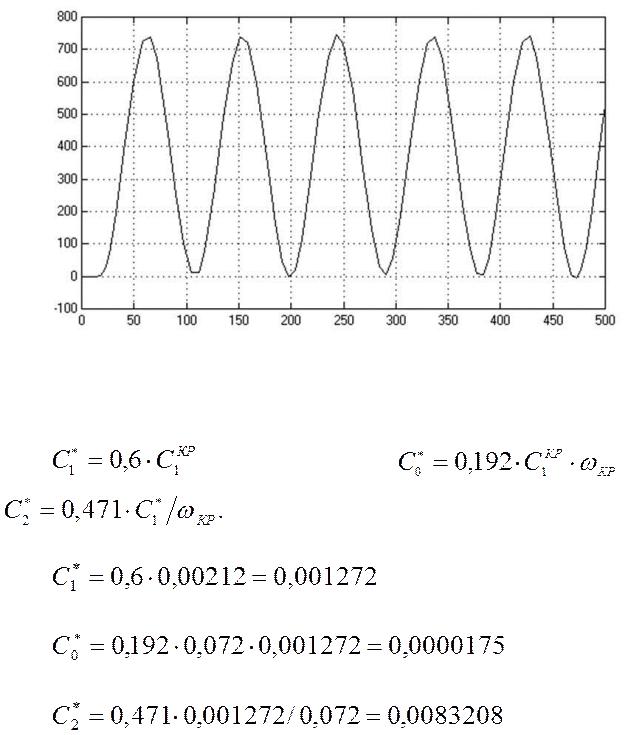
Рисунок7.3 – Автоколебательный процесс.
Оптимальные настройки ПИД-регулятора находим по формулам:
, |
, |
;
;
.

Рисунок7.4 – Процесс регулирования с оптимальными настройками ПИД-регулятора
1.8. Метод Циглера-Никольса
Далее рассмотрим приближенные методы настройки. Наиболее извест-ным является метод Циглера-Никольса, относящейся к online методам, его идея состоит в следующем. Для начала необходимо выставить время интегрирования и дифференцирования на ноль. Затем необходимо постепенно увеличивать ко-эффициент передачи, до тех пор пока в контуре системы не возникнут колеба-ния с четко определяемой степенью затухания (можно добиться незатухающих колебаний). Полученное значение коэффициента передачи зафиксировать, и по графику переходного процесса определить период автоколебаний. Далее необ-ходимо найти параметры настройки регулятора по эмпирическим формулам [54].
К сожалению, данный метод не учитывает требования к запасу устойчи-вости системы, что является его главным недостатком. Преимуществом данно-го расчета является его простота, но, как правило, полученные настройки дале-ки от оптимальных, а переходные процессы имеют небольшую степень затуха-ния.
1.16. Метод ВТИ
Эмпирические формулы ВТИ для определения параметров настроек были получены на моделях объектов и реальных регуляторов. Данный метод исполь-зует данные кривых разгона.
На рис. 1.6 показаны приближенные формулы для расчета значений па-раметров П, ПИ и ПИД регуляторов, обеспечивающих минимум квадратичного критерия качества при запасе устойчивости со степенью затухания ψ = 0,75 для объекта с самовыравниванием [63].

Настройка коэффициентов ПИД-регулятора.
Опубликовано23.02.2014 авторомAveal
В предыдущей статье мы разобрались с принципом-регулятораработыссыл(ка).ПИД Теперь, как и обещал, рассмотрим основные методы настро коэффициентов ) Вообще, по большому счету, при-регулятораиспользова необходимоп строить модель всей системы в целом и математич необходимые значения коэффициентов. Так делать правильно. никто не делаетНа самом деле, математический расчет коэффици далеко не тривиальная, требуетихзнанийглубоктеории автоматиче управления, поэтому и используются другие, упрощенные,


Наиболее часто использующимся методом настройки коэффици метод Циглера-Никольса. Заключается он в следующем…
Метод Циглера-Никольса.
Для начала обнуляем все коэффициенты регулятора (пр интегральный и дифференциальный)
Постепенно начинаем увеличивать пропорциональный коэффи за реакцией системы. При определенном значении возник колебания регулируемой величины.
Фиксируем коэффициент,при котором это произошло. Кроме тог период колебаний системы.
Собственно, на этом практическая часть метода заканчивает коэффициентарассчитываем пропорциональный коэффициент-регулятора:ПИД
А из него получаем и остальные:
Метод довольно прост, но применить его можно далеко не всег еще ни разу не приходилось настраивать регуляторНотемтакимне обра менее, этот метод является основнымсчету,и, по единственнымбольшому широк известным. Просто подходит не всем и не всегда.
Что же делать, если метод-НикольсаЦиглеране сработал? Тут придет н «аналитический» метод настройки =)
Опять же обнуляем все коэффициенты и начинаем увельныйичивать. Но теперь не ждем появления колебаний, а просто фиксируем для каждого значения коэффициента (отличным вариантом б графика величины, которую необходимо стабилизировать, для коэффициента). Если что,видим,например, система очень медленно нужное значение, увеличиваем пропорциональный коэффициент. сильно колебаться относительно нужной величины? Значит, ко велик, уменьшаем и переходим к настройкеяющихдругих. составл
Понимая, как работа- егуляторПИД в целом, и представляя, как до настраиваемая система, можно-такидовольнобыстро и точно наст коэффициенты регулятора. Особенно, если есть возможность по зависимости и визуально следить за поведением системы.
Вот некоторые правила, которые могут помочь при настройке:
Увеличение пропорционального коэффициента приводит быстродействия, но снижение устойчивости системы
Увеличение дифференциальной составляющейприводиттакже к значительному увеличению быстродействия
Дифференциальная составляющая призвана устранить затуха возникающие при использовании только пропорциональной со
Интегральная составляющая должна устранять остаточноеие системы при настроенных пропорциональной и диффе составляющих
Кстати, стоит добавить, что не всегда необходимо исп составляющие -регулятора,ПИД порой хватает пропорциона дифференциальной, например-регулятор)(ПД . ем,Вобщвсе сводится к тому, каждой системы необходим свой собственный подход при настро ПИД-регулятора.
На этом на сегодня все, возможно,-нибудь рассмотримкак практическую реа ПИД-регулятора
Смотри дополнительный файл
Методы вти циглера
7)
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных законов регулирования можно обеспечить лишь при благоприятных динамических характеристиках объекта. Однако большинству промышленных объектов химической технологии свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами. Для повышения качества регулирования необходим переход от одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные регулирующие устройства – динамические компенсаторы или дополнительные регуляторы.
Рис. 1.7. Пример комбинированной системы регулирования концентрации упаренного раствора:
1– регулятор состава; 2 – динамический компенсатор
В зависимости от характера корректирующего импульса различают следующие многоконтурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные – двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
*****
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования – стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара – выполняется регулятором 1. Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.
Рис. 1.8. Пример комбинированной системы регулирования состава дистиллята:
1 – подогреватель исходной смеси; 2 – ректификационная колонна; 3 – дефлегматор; 4 – флегмовая емкость; 5 – регулятор состава; 6 – динамический компенсатор
На рис. 1.8 приведен пример комбинированной АСР состава дистиллята в ректификационной колонне. Стабилизация состава дистиллята обеспечивается регулятором 5 путем изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе – расхода разделяемой смеси. Корректирующий импульс на задание регулятору поступает через динамический компенсатор 6.
Рассмотренные примеры иллюстрируют два способа построения комбинированных АСР. Обе системы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования – замкнутого (через регулятор 1) и разомкнутого (через компенсатор 2). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижение абсолютной инвариантности в реальных системах регулирования практически невозможно. Обычно ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию.
Условиеинвариантности разомкнутой и комбинированной АСР.Рассмотрим условие инвариантности разомкнутой системы (рис. 1.11): y(t)=0.
Рис. 1.9. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход объекта: а – исходная схема; б – преобразованная схема; 1 – регулятор; 2 – компенсатор
Рис. 1.10. Структурные схемы комбинированной АСР при подключении выхода компенсатора на вход регулятора: а – исходная схема; б – преобразованная схема; 1 – регулятор; 2 – компенсатор
Рис. 1.11. Структурная схема разомкнутой АСР.
Переходя к изображениям по Лапласу Хв(р) и Y(p) сигналов Хв(t) и Y(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения Wв(p) и регулирования Wp(p) и компенсатора Рк(р)
При наличии возмущения [Хв(р)=0] условие инвариантности (1.19) выполняется, если
откуда
Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (см. рис. 1.9, а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (см. рис. 1.9, б), передаточные функции которых соответственно равны:
При этом условие инвариантности (1.19) записывается в виде
Если должно выполняться условие
т. е. условие инвариантности (1.19 а).
3.9. Многоконтурные АСР
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных типовых законов можно обеспечить лишь при благоприятных динамических характеристиках объекта. Большинство же промышленных объектов химической технологии характеризуется значительным чистым запаздыванием и большими постоянными времени. В этих случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами. Для повышения качества регулирования необходим переход от

одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям или вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные регулирующие устройства – динамические компенсаторы или дополнительные регуляторы.
По характеру корректирующего импульса различают следующие многоконтурные АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные – двухконтурные замкнутые АСР, построенные на базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
Комбинированные АСР
Комбинированные системы регулирования применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 3.28. приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования – стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара
– выполняется регулятором 1.
Рис.3.28.Пример комбинированной системы регулирования
концентрации упаренного раствора:
1-регулятор состава; 2 – динамический компенсатор.
Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.