

kontemirov
.pdfПЭ -пьезоэлемент.
Закон изменения регулируемой величины и требуемое значение уровня задаются в регуляторе. При изменении уровня в емкости изменяется выходной сигнал датчика. В регуляторе происходит сравнение поступившего сигнала с заданным и появляется сигнал рассогласования. В зависимости от величины, направления и скорости изменения рассогласования в регуляторе рассчитывается значение управляющего воздействия, которое поступает на усилитель мощности. Усиленный сигнал поступает на исполнительный механизм МЭО, который изменяет положение клапана, тем самым изменяя расход и регулируя уровень.
3. Построение математических моделей элементов
Для динамического синтеза системы построим математические модели элементов системы управления.
.1 Расчет датчика обратной связи
Датчик состоит из двух элементов: мембраны и пьезоэлемента.
Передаточная функция датчика рассчитывается по формуле:
Коэффициент передачи САПФИР-22М-ДИ определим по статической характеристике:
DI - max выходной токовый сигнал,
DP - max давление.
Постоянная времени будет определяться как постоянная времени мембраны по формуле:
- коэффициент вязкого трения
жесткость мембраны
R=30 - рабочий радиус мембраны, мм
h=0.35 - толщина мембраны, мм
Е=2,1×1011 - модуль упругости материала, Па
r=0,2 - относительный радиус жесткого центра, мм
a=3,64
Подставив значения в формулу получим:
Тогда получим:
Передаточная функция датчика будет:
3.2 Электронный усилитель 1
автоматический датчик электронный микроконтроллер
Усилитель выбран из линейки промышленных усилителей мощности фирмы Cridom и описывается дифференциальным уравнением 1 порядка:
,
U2 - выходное напряжение усилителя (В),1 - входное напряжение усилителя (В),
к - коэффициент усиления усилителя по напряжению.
Тогда передаточная функция усилителя мощности имеет вид апериодического звена 1 порядка:
Коэффициент усиления усилителя выбираем из условия согласования выходного сигнала регулятора 0-5В с напряжением последующего усилителя равным 24В.
В паспорте к усилительному элементу типа D4825 указывается время переходного процесса tпер = 0,004 сек. Для звена 1 порядка время переходного процесса связано с постоянной времени следующей зависимостью:
По этой формуле постоянная времени усилительного элемента равна:
Тогда окончательно передаточная функция ключевого элемента имеет вид:
3.3 Электронный усилитель 2
Данный элемент усиливает сигнал 24В в сигнал 220В для управления исполнительным механизмом.
Передаточная функция этого элемента будет:
.4 Исполнительный механизм
Исполнительным механизмом является механизм электрический однооборотный, который включает в себя три звена. Определим передаточные функции этих звеньев.
.4.1 Двигатель
По паспортным данным используется двигатель типа ДАУ-25.
Мощность двигателя (Nдв) - 25Вт,
Напряжение питания (Uп) - 220В,
Число полюсов (n) - 12,
Момент нагрузки на валу (Мн) - 40Н×м.
Передаточная функция двигателя рассчитывается по формуле:
.4.2 Редуктор
Передаточной функцией редуктора является обратная величина его передаточному отношению (i).
По паспортным данным передаточное число редуктора = 416,7
.4.3 Клапан Передаточная функция клапана рассчитывается по формуле:
Коэффициент передачи найдем по статической характеристике:
Передаточная функция исполнительного механизма будет выглядеть следующим образом:
.5 Объект регулирования
Рисунок 8 - Объект регулирования (емкость с жидкостью)
Объект регулирования является устойчивым звеном первого порядка, и его передаточную функцию найдем по формуле:
Коэффициент передачи будет равен:
Постоянная времени объекта регулирования найдем по формуле:
-время разгона ОР,
-площадь горизонтального сечения ОР,
-значения соответствующих величин при равновесном состоянии ОР,
Получим передаточную функцию:
.6 Микроконтроллер
Рассмотрим микроконтроллер, как импульсный элемент системы и рассчитаем его дискретность.
Входы и выходы микроконтроллера аналоговые с дискретностью 8 бит - 256, при напряжении 0-5 вольт на входах и выходах, микроконтроллер выдает разрешение 0,02 В, что позволяет судить о его практической линейности по входам и выходам.
Частота кварца микроконтроллера равна 12 МГц. Один такт программы выполняется за 1/12 частоты микроконтроллера, соответственно за 1 минуту производится 6´107 тактов программы.
Предположим, что для принятия решения микроконтроллера необходимо 103 тактов программы, тогда дискретность микроконтроллера равна 6´104 тактов в минуту, а период дискретности Т=1,6´10-5 минуты, что сводит к нулю дискретность микроконтроллера по времени, так как наибольшая постоянная времени равна 1мин. Делаем вывод, что микроконтроллер не вносит помех в рассматриваемую систему, и его передаточную функцию принимаем за единицу.
7 Структурная схема системы
Функциональная схема автоматического регулирования уровня в емкости, включающей передаточные функции элементов, представлена на рисунке 9. Все передаточные функции элементов согласованы по типу сигналов, диапазонам их изменения и мощности
Уровень является косвенным показателем гидродинамического равновесия в аппарате. Постоянство уровня свидетельствует о соблюдении материального баланса, когда приток жидкости равен стоку, и скорость изменения уровня равна нулю.
Важно! Следует отметить, что «приток» и «сток» здесь являются обобщенными понятиями. В случае, когда в аппарате (сборники, смесители, промежуточные емкости, жидкофазные сооружения и проч.) не происходить фазовых превращений, приток равен расходу жидкости, подаваемой в аппарат, а сток – расходу жидкости, отводимой из аппарата. В технологических процессах, сопровождающихся изменением фазового состояния вещества, уровень является характеристикой не только гидравлических, но тепловых и массообменных процессов, а приток и сток учитывают фазовые превращения (испарение, конденсацию и проч.)
Изменение уровня L в аппарате с постоянной по высоте площадью поперечного сечения А в общем случае можно представить уравнением:
(6)
,
где Fвх и Fвых – приток и сток вещества соответственно с учетом химических и фазовых превращений.
В зависимости от требуемой точности поддержания уровня применяют один из двух способов регулирования:
1) позиционное регулирование, при котором уровень в аппарате поддерживается в заданных, достаточно широких пределах  ;
;
2) непрерывное регулирование, при котором обеспечивается стабилизация уровня на заданном значении L=Lзд.
Регулирование уровня применяют для автоматизации водонапорных, подпиточных, расширительных и других баков и резервуаров, а также для сигнализации переполнения или опорожнения емкостей.
Системы позиционного регулирования уровнем чаще всего устанавливают на сборниках жидкости (например, башенных водокачек) или на промежуточных емкостях (например, в
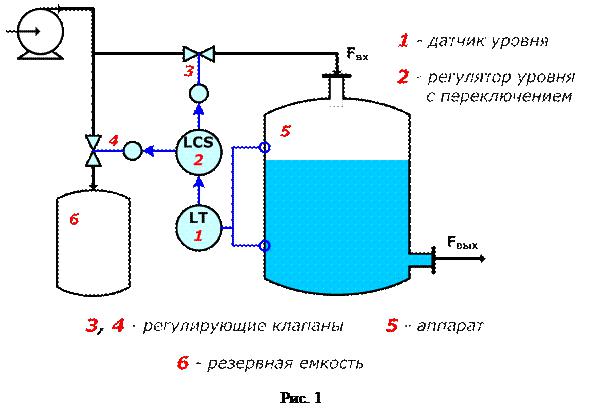
резервуарах водоотливных насосных станций). Пример схемы позиционного регулирования уровня жидкости в аппарате показан на рис. 41. При достижении уровнем верхнего предельного значения поток автоматически переключается на резервную емкость: регулятор закрывает регулирующий клапан 3 и открывает клапан 4.
При отсутствии фазовых превращений в аппарате непрерывное регулирование уровня осуществляют одним из трех способов:
-изменением расхода жидкости на входе в аппарат (регулирование «на притоке», рис. 42–
а);
-изменением расхода жидкости на выходе из аппарата (регулирование «на стоке», рис. 42–
б);
-каскадным регулированием соотношения расходов жидкости на входе в аппарат и выходе из него, с коррекцией по уровню (рис. 42–в).
В случаях, когда процессы в аппарате сопровождаются фазовыми превращениями, уровень можно регулировать изменением подачи теплоносителя. В таких аппаратах уровень взаимосвязан с другими параметрами (например, давлением), поэтому выбор способа регулирования в каждом конкретном случае должен выполняться с учетом основных контуров регулирования. Особенно высокие требования предъявляются к точности регулирования уровня в теплообменных аппаратах, в которых уровень жидкости существенно влияет на тепловые процессы: например, в паровых теплообменниках уровень конденсата определяет фактическую поверхность теплообмена.

Особое место в системах регулирования уровня занимают САУ аппаратов с кипящим (псевдосжиженным) слоем сыпучего зернистого материала. Устойчивое поддержание уровня в сушилках кипящего слоя при сушке осадков сточных вод возможно в достаточно узких пределах соотношения расхода газа и массы слоя. При значительных колебаниях расхода газа или расхода зернистого материала наступает режим уноса слоя или его оседания. Поэтому к точности регулирования уровня кипящего слоя предъявляют особо высокие требования. В качестве управляющих воздействий используют расход зернистого материала осадка на входе или выходе из аппарата (рис. 43–а), или расход газа на ожижение слоя
(рис. 43–б).

Классификация уровнемеров смотреть в книге
17) классификация датчиков давления в книге
Для регулирования настройки используются ПИ – регулятор. Параметром настройки, которого, является:
К - коэффициент усиления.
ТИ - время интегрирования.
Эти параметры будут оптимальными, если переходный процесс будет иметь колебательно – затухающий вид.
1.А – динамическая ошибка будет меньше зазора безопасности.
2.Tр – время регулирования должно быть минимальным.
d - статическая ошибка или контрольная точка регулятора.

Колебательно – затухающий процесс может перейти в колебательный
процесс из-за изменения объекта (изменение режима нефтепровода).
Все станции по перекачке нефти имеют два режима работы – автоматический, когда процесс поддерживает регулятор и ручной, когда процессом управляет оператор. Лучший процесс регулирования это К =3 и ТИ =0,5
Методы регулирования давления
Назначение САР – это поддержание давления на приёме НПС не ниже заданного, исходя из условий кавитации насоса, и на выходе станции, не выше заданной величины, исходя условий прочности трубопровода.
1. Метод регулирования числа оборотов насосного агрегата, этим методом достигается:
а) глубина регулирования
б) обеспечивает плавный пуск и плавную остановку, что сохраняет трубопровод от действия ударной волны.
2. Метод дросселирования.
Метод дросселирования реализуется
и используется на объектах
“ Транснефть”
DН = НН - НТР
НН –напор насоса (точка С)
НТР - напор в трубе (точка В)

DН – разность напоров насоса и напора в трубе (точка А)
Данный метод контролирует:
а) параметр нагнетания насоса и обеспечивает его защиту
б) зависимость перепада давления от положения заслонки – величина не линейная.
Da1 – зона нечувствительности, т.е.
регулятор предварительно прикрывают, убрав зону нечувствительности (угол a1)
Da2 – зона дросселирования -
(зона, где появляется перепад).
Основными недостатками этого метода являются:
1.Предварительно прикрывают регулятор, убрав зону нечувствительности.
2.Ограничивают крайнее положение заслонки.
3.n2 > n1 Поток нефти m закрывает заслонку, чем больше перепад, тем больше усилие закрытия.
а) нельзя оставлять заслонку в потоке нефти в свободном состоянии.
б) привод заслонок должен иметь систему торможения, предотвращающее закрытие заслонки при снятии напряжения.
в) необходимо контролировать перепад давления на регулирующей заслонке, при максимальном перепаде от 17 – 19 атмосфер.
Блок –схема САР давления

Селектор пропускает больший по величине электрический сигнал (его функция), т.е. уменьшается давление приёма, заслонка отрабатывает по приёму (заслонка прикрывается) увеличивается давление на выходе станции (заслонка прикрывается по выходу).
Приём станции |
Выкид |
Выкид станции |
Заслонк |
|
|
|
|
насоса |
а |
|
|
|
|
||
|
|
|
|
|
|
||
Атм. |
мА |
Атм. |
мА |
Атм. |
мА |
% |
мА |
Предел |
ток |
Предел |
ток |
Предел |
ток |
Предел |
ток |
измерений |
измерений |
измерений |
измерений |
||||
0 |
4 |
0 |
4 |
0 |
4 |
открытие - 0 |
4 |
10 |
8 |
25 |
8 |
17,5 |
8 |
25 |
8 |
20 |
12 |
50 |
12 |
35 |
12 |
50 |
12 |
30 |
16 |
75 |
16 |
52,5 |
16 |
75 |
16 |
40 |
20 |
100 |
20 |
70 |
20 |
100 |
20 |
Режимы работы
1.Режим управления с помощью штурвала, для этого необходимо отключить силовой блок питания или перевести заслонку в кнопочный режим.
2.Кнопочный режим с регулятора ЕЕ на НS1
3.Ручной режим т.е. сигнал у1/3 задаётся оператором, для этого селектор уS ставим в ручной режим переключателем НS2. В некоторых системах ручной