

Turanov_Bondarenko_Vlasova_Kreplenie_gruzov_v_vagonakh
.pdf20 |
åSxi ( |
|
zi ) + [(Φ y |
+ Φцб )xC + Wy xW ]sinθ + |
||||||||||
− åSzi xi + |
|
|||||||||||||
i=1 |
i=5,10,15,20 |
|
|
|
|
|
|
|
|
|
|
|
||
+ 10−3 Mg cosθx |
C |
+ Φ |
x |
z |
C |
− Φ |
x |
C |
− W z |
+ F |
h − Nx |
N |
= 0; |
|
|
|
|
|
z |
|
x Wx |
трx |
|
|
|||||
сумма моментов сил вокруг оси Oz:
20 |
|
|
|
|
|
]cosθ −10−3 Mg sinθxC |
|
|
||||
å(S yi xi − Sxi yi ) + [(Φ y + Φцб )xC + Wy xW |
+ |
|||||||||||
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
+ Fтрy xN − Fтрx yN = 0; |
|
|
|
|
|
|
|
|
|
|
||
деформационные соотношения |
|
y |
|
|
l |
|
|
|
||||
20 |
20 |
x |
i |
20 |
20 |
20 |
i |
|
|
|||
[( x − å yi |
φ)å |
|
+ ( y + å xi |
φ)å |
|
i |
] = −å(Si − S0i ) |
|
|
, |
||
li |
|
li |
|
|
|
|
||||||
i=1 |
i=1 |
|
i=1 |
i=1 |
|
i=1 |
EA |
|||||
(8.9)
(8.10)
(8.11)
где Sxi, Syi, Szi – проекции на координатные оси отыскиваемых значений усилий в растяжках Si (i=1…20 – количество гибких элементов крепления) в кН
Sxi = Si cosαi cos βпрi ; Syi |
= Si cosαi sin βпрi ; |
|
Szi = Si sinαi |
(8.12) |
|||||||||||||||||
или поскольку |
|
|
xi |
|
|
|
|
|
|
yi |
|
|
|
|
zi |
|
|
||||
cosα |
i |
cos β |
прi |
= |
; |
cosα |
i |
sin β |
прi |
= |
; |
sinα |
i |
= |
, |
(8.13) |
|||||
|
|||||||||||||||||||||
l |
l |
||||||||||||||||||||
|
|
|
|
|
|
|
|
l |
i |
||||||||||||
|
|
|
|
|
i |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|||
то полученные выражения проекции усилий в гибких элементах креплений груза можно также представить и в таком виде:
Sxi = Si |
x |
Syi = Si |
y |
i |
S zi = Si sin αi |
= Si |
zi |
|
||
i ; |
l |
|
|
|
(8.14) |
|||||
|
l |
|
||||||||
|
l |
|
i |
|
|
|
i |
|
||
|
i |
|
|
|
|
|
|
|
||
В выражениях (8.12) и (8.13) α и βпр - углы наклона гибких элементов креплений на |
||||||||||
плоскость Oxy и плоскости элементов креплений на ось Ox в рад. и xi , yi, zi – проекции |
||||||||||
элементов креплений на координатные оси Ox, Oy, Oz в м; |
|
|
|
|
||||||
h и b1 – высота груза и поперечное расстояние между петлями для крайних растяжек (на- пример, с номерами 5, 10, 15, 20) в м; x, y, Δφ – отыскиваемые значения малых перемеще- ний груза по оси Ox, Oy в м и его поворота вокруг оси Oz в рад.; li - длина элемента крепле- ния в м;
EA - физико-геометрическая характеристика (жесткость на растяжение) гибкого эле- мента в кН. Здесь E – модуль упругости гибкого элемента, скрученного из стальной ото- жженной проволоки, кН/ м2 (Е = 1.104 МПа)25, Ai - площадь поперечного сечения растяжки в
|
|
A = n |
|
× |
π × d 2 |
|
2 |
: |
i |
i |
с учётом того, что в ней ni – число нитей в i –ом гибком элементе в |
||
м |
i |
|
4 |
|||
|
|
|
|
|
|
шт.; di – диаметр проволоки в м;
xC, xW, zC, zW, zWx – координаты точек приложения продольной, поперечной и вертикаль- ной инерционных сил и ветровой нагрузки соответственно по осям Ox и Oz в м; N и xN, yN –
25 Зылев В.Б. Вычислительные методы в нелинейной механике конструкций. - М.: НИЦ
«Инженер», 1999. - 145 с.
170
отыскываемые значения нормальной реакции связи в Н и координаты точки ее приложения в м; θ – угол, характеризующий возвышение наружного рельса в рад.; xi и yi – координаты верхних монтажных петель растяжек в м; S0i - начальные натяжения растяжек в кН.
Ввыражениях (8.12) и (8.13) также обозначены:
Φey - переносная сила инерции груза по поперечной оси вагона в кН
Φey = 10−3 Maey , |
(8.15) |
где М – масса груза, кг;
aey - переносное поперечное ускорение вагона, м/с2 (общеизвестно, что одним из пока-
зателей динамических качеств грузового вагона являются величины средних из наибольших значений ускорений, замеренных в связях при проведении опытных испытаний. Они при оценке хода вагона в поперечном направлении имеют следующие значения, м/c2: отличное -
ay ≤ 1 (или ay ≤ 0.102g ), хорошее – ay = 1…1.5 (или ay=0.102…0.153)g, удовлетвори-
тельное – ay = 1.6…3 (или ay=0.102…0.153)g, допустимое – ay = 3.1…4.5 (или ay = 0.316…0.459)g);
Φez – переносная сила инерции груза по вертикальной оси, кН: |
|
Φez = 10−3 Maz , |
(8.16) |
где az – переносное ускорение по вертикальной оси вагона, допустимое значение которого находится в пределах (0.46...0.66)g, м/с2;
Фцб - реальная центробежная сила инерции в кН, которая развивается при движении по- езда по кривой, определяемая по общеизвестной формуле:
Φ |
цб |
= |
10−3 Mv2 |
(8.17) |
|
|
12.96R |
||
|
|
|
|
где v - скорость движения поезда по кривой, м/с; 3.62 = 12.96 – переводной коэффициент км/ч на м/с; R – радиус кривизны переходной кривой в рассматриваемой точке, м.
Анализируя составленные уравнения равновесия системы “груз - крепления – вагон” с плоским основанием, убеждаемся, что проекции усилий всех гибких элементов креплений на координатные оси, как отмечено в п.2.1.1, имеют положительный знак, независимо от парно- сти их расположения относительно продольной оси вагона. Задача состоит лишь во включе- нии в число уравнений равновесия системы “груз – крепление – вагон” с плоским основани- ем внешних сил и моментов, применением при этом общепринятого правила знаков.
Ниже приводим развернутый вид составленных уравнений равновесия, где в качестве од- ного из неизвестных четко видны усилия в гибких элементах креплений в виде Si (i =1…20).
С учетом первого выражения (8.12) сдвигающая сила по оси Ox в виде (8.1) может быть представлена в виде:
171
S1 cosα1 cos βпр1 + S2 cosα21 cos βпр2 + S3 cosα3 cos βпр3 +
+S4 cosα4 cos βпр4 + S5 cosα5 cos βпр5 + S6 cosα6 cos βпр6 +
+S7 cosα7 cos βпр7 + S8 cosα8 cos βпр8 + S9 cosα9 cos βпр9 +
+ S10 |
cosα10 |
cos βпр10 |
+ S11 cosα11 cos βпр11 + S12 cosα12 cos βпр12 + |
(8.18) |
|
+ S13 cosα13 |
cos βпр13 + S14 cosα14 cos βпр14 + S15 cosα15 cos βпр15 + |
||||
|
|||||
+ S16 |
cosα16 |
cos βпр16 |
+ S17 cosα17 cos βпр17 + S18 cosα18 cos βпр18 + |
|
|
+ S19 |
cosα19 |
cos βпр19 |
+ S20 cosα20 cos βпр20 + Φx −Wx = Tx . |
|
|
С учетом второго выражения (8.12) сдвигающая сила по оси Oу в виде (8.4) может быть приведена к виду:
S1 cosα1 sin βпр1 + S2 cosα2 sin βпр2 + S3 cosα3 sin βпр3 +
+S4 cosα4 sin βпр4 + S5 cosα5 sin βпр5 + S6 cosα6 sin βпр6 +
+S7 cosα7 sin βпр7 + S8 cosα8 sin βпр8 + S9 cosα9 sin βпр9 +
+S10 cosα10 sin βпр10 + S11 cosα11 sin βпр11 + S12 cosα12 sin βпр12 +
+ S13 cosα13 sin βпр13 + S14 cosα14 sin βпр14 |
+ S15 cosα15 sin βпр15 |
+ |
(8.19) |
|
|
|
+S16 cosα16 sin βпр16 + S17 cosα17 sin βпр17 + S18 cosα18 sin βпр18 +
+S19 cosα19 sin βпр19 + S20 cosα20 sin βпр20 +
+ (Φ y + Φцб + Wy ) cosθ −10−3 Mg sinθ = Ty .
С учетом второго и третьего выражений (8.12) сумма моментов сил вокруг оси Ox в виде (8.8) может быть приведена к виду:
S1 sinα1 y1 + S2 sinα2 y2 |
+ S3 sinα3 y3 + S4 sinα4 y4 + |
|
|
||||||
+ S6 sinα6 y6 + S7 sinα7 y1 + S8 sinα8 y1 + S9 sinα9 y9 |
+ |
|
|||||||
+ S11 sinα11 y11 + S12 sinα12 y12 + S13 sinα13 y13 + S14 sinα14 y14 + |
|
||||||||
+ S16 sinα16 y16 + S17 sinα17 y17 + S18 sinα18 y18 + S19 sinα19 y19 + |
|
||||||||
+ S5 cosα5 sin βпр5 (− z5 ) + S10 cosα10 sin βпр10 (− z10 ) + |
(8.20) |
||||||||
+ S15 cosα15 sin βпр15 (− |
z15 ) + S20 cosα20 sin βпр20 (− |
z20 ) − |
|||||||
|
|||||||||
− [(Φ y + Φцб )zC + Wy zW ]cosθ + Wy sinθ 0.5b1 + |
|
|
|||||||
10−3 Mg sinθz |
C |
+ F |
h + Ny |
N |
= 0. |
|
|
||
|
трy |
|
|
|
|
|
|||
С учетом второго и третьего выражений (8.12) сумма моментов сил вокруг оси Oу в виде (8.9) может быть записана:
172
− (S1 sinα1x1 + S2 sinα2 x2 + S3 sinα3 x3 + S4 sinα4 x4 |
+ |
+ S6 sinα6 x6 + S7 sinα7 x1 + S8 sinα8 x1 + S9 sinα9 x9 |
+ |
+ S11 sinα11x11 + S12 sinα12 x12 + S13 sinα13x13 + S14 sinα14 x14 + |
|
|||||||||||
+ S16 |
sinα16 x16 + S17 sinα17 x17 + S18 sinα18 x18 + S19 sinα19 x19 ) + |
|
||||||||||
+ S5 cosα5 cos βпр5 ( |
z5 ) + S10 cosα10 cos βпр10 ( |
z10 ) + |
(8.21) |
|||||||||
+ S15 |
cosα15 cos βпр15 ( z15 ) + S20 cosα20 cos βпр20 ( z20 ) + |
|||||||||||
|
||||||||||||
+ [(Φ |
y |
+ Φ |
цб |
)x |
C |
+ W |
x |
]sinθ +10−3 Mg cosθx |
C |
+ |
|
|
|
|
|
|
y W |
|
|
|
|||||
+ Φ x zC − Φz xC −Wx zWx + Fтрx h − NxN = 0.
С учетом выражений (8.13) деформационные соотношения в виде (8.11) могут быть пред- ставлены:
[( |
x − y |
φ) cos β |
пр1 |
+ ( |
y + x |
φ)sin β |
пр1 |
]cosα |
|
= −(S |
− S |
|
) |
|
l1 |
; |
|
|
(8.22) |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
1 |
|
01 |
|
|
EA |
|
|
|
|||||||||||
[( |
x − y2 |
φ) cos βпр2 + ( y + x2 |
|
φ)sin βпр2 ]cosα2 |
= −(S2 − S02 ) |
l2 |
|
;(82.23) |
|
|
|||||||||||||||||||||||||||||
|
EA |
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
…………………………………………………………………………….…………….… |
|
||||||||||||||||||||||||||||||||||||||
……………………………………………………………………………………….……. |
|
||||||||||||||||||||||||||||||||||||||
[( |
x − y |
φ) cos β |
пр19 |
+ ( |
y + x |
φ)sin β |
пр19 |
]cosα |
|
= −(S |
|
|
− S |
|
|
) |
|
l19 |
|
; |
|||||||||||||||||||
|
|
|
|
|
|
EA |
|||||||||||||||||||||||||||||||||
|
|
19 |
|
|
|
|
|
|
19 |
|
|
|
|
|
|
|
|
|
19 |
|
|
19 |
|
|
|
019 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
…. |
|
|
|
|
|
(8.40) |
l20 |
|
||||||||
[( |
x − y |
20 |
φ) cos β |
пр20 |
+ ( |
y + x |
20 |
φ)sin β |
пр20 |
]cosα |
|
20 |
= −(S |
20 |
− S |
020 |
) |
|
. |
||||||||||||||||||||
|
|
EA |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
(8.41) |
|
|
|||
Выражения (8.18)…(8.41) совместно с физическими сторонами статической неопреде- лимой задачи механической системы “груз – крепление – вагон” с плоским основанием в ви- де (8.2), (8.5) и соотношениями (8.3), (8.6) представляют собой систему уравнений. Эти вы- ражения при умелом использовании возможности вычислительной среды MathCAD позво- ляют непосредственно определять, например, усилия в гибких элементах креплений груза от одновременного приложения к ним продольных, поперечных и вертикальных сил.
Таким образом, с использованием основных положений общей механики составлены 26 уравнений в виде системы (8.18)…(8.41) с 26-ю неизвестными совместно с физическими сто- ронами статической неопределимой системы “груз – крепление – вагон” с плоским основа- нием в виде (8.2), (8.5) и соотношениями (8.3), (8.6), которые не оказывают влияния на ста- тическую неопределимость системы, но учитывают характер изменения силы трения.
Составленная система уравнений (8.18)…(8.41) с учетом характера изменения силы трения по существу представляет собой обобщенную математическую модель системы “груз
– крепление – вагон” с плоским основанием, легко реализуема в вычислительной среде MathCAD, применение которой позволяет составить программы расчета по непосредствен-
173
ному определению усилий в гибких элементах крепления, нормальную реакцию связи и ко- ординату точки ее приложения, значения перемещений груза как по продольной, так и поперечной оси вагона, а также его поворот вокруг вертикальной оси.
Кроме того, решение статически неопределимой задачи по определению усилий в гиб- ких элементах креплений механической системы “груз – крепление – вагон” позволит опре- делить значения сдвига груза вдоль и поперек вагона от одновременного действия продоль- ных, поперечных и вертикальных сил, величины которых по существу показывают располо- жение упорных брусков, куда они должны быть прибить к полу вагона от торца груза в зави- симости от массы и выбранного способа креплений.
Помимо этого, найденные величины сдвига груза вдоль и поперек вагона совместно со значением нормальной реакции связи в последующем дадут возможность определить силы, действующие со стороны груза на упорные бруски, по величинам которых могут быть вы- полнены расчеты по определению количества крепежных элементов (гвоздей) для закрепле- ния упорных брусков.
=============================================================
►Ниже приводим результаты вычислительных экспериментов по опреде- лению усилий в гибких элементах креплений груза при одновременном дейст- вии на него продольных, поперечных и вертикальных сил при симметричном
размещении груза относительно оси симметрии вагона и возможных сдвигов груза вдоль и поперек вагона, а также возможный его поворот относительно вертикальной оси.
8.3. Результаты вычислительных экспериментов по расчёту гибких элементов креплений груза и их анализ
Results of experiments for calculation flexible elements of cargo fastening and their analysis
8.3.1.Общие положения по разработке методики расчета гибких элементов креплений, используемых
для удержания груза от сдвига
Выполненные результаты аналитических исследований для определения усилий в гибких элементах креплений в виде конечных формул (см. п.8.2) дают возможность обосновать рациональный способ крепления груза на основе ре- зультатов вычислительных экспериментов, направленных на усовершенствова- ние методики действующего ТУ. Усовершенствованный способ расчета усилий в гибких элементах креплений груза должен способствовать успешному функ- ционированию железнодорожного транспорта, обеспечивая при этом надеж- ность и безопасность движения поездов, позволяющих сохранную перевозку груза в пути следования и своевременную доставку груза грузополучателю.
174
Разработка усовершенствованной методики расчёта гибких элементов кре- пления, используемого для удержания груза, базируется на классических мето- дах общей механики с применением универсальной среды MatCAD.
Вычислительные эксперименты по определению усилий в гибких элемен- тах крепления, значений сдвигов груза вдоль и поперек вагона, нормальной ре- акции связи и координаты точек ее приложения (см. раздел 1) выполнены в следующей последовательности:
-ввод исходных данных (технико-эксплуатационные характеристики ваго- на, геометрические параметры гибких элементов крепления и груза, масса, ско- рость движения вагона, коэффициент трения соприкасающихся поверхностей груза и пола вагона, усилия предварительных закруток гибких элементов креп- ления);
-непосредственное вычисление усилий Si в гибких элементах крепления, значений сдвигов груза вдоль и поперек вагона, нормальной реакции связи и координаты точек ее приложения с использованием полученных в п.8.2 выра- жений в виде (8.18)…(8.43) совместно с физическими сторонами статической неопределимой задачи механической системы “груз – крепление – вагон” с плоским основанием в виде (8.2), (8.5) и соотношениями (8.3), (82.6) с исполь- зованием возможности вычислительной среды MathCAD.
8.3.2. Результаты вычислительных экспериментов по определению усилий в гибких креплениях груза
Для примера приводится расчет усилий в гибких элементах крепления гру- за, схема размещения и крепления которого на платформе, приведена на рис. 8.2.
На схеме гибкие элементы крепления, расположенные с правой стороны платформы по продольной оси, обозначены номерами 1…10, а слева – 11…20, причем крепления, обозначенные номерами 1..5 и 11..15, расположены с левой стороны поперечной оси, а крепления, обозначенные номерами 6…10 и 16…20, - с правой стороны этой оси.
Исходные и другие сопутствующие данные для примера приведены ниже.
А. Постоянные параметры расчета: g = 9.81 - ускорение свободного паде- ния, м/с2; Е = 1×107 - модуль упругости гибких элементов крепления с учетом скрутки проволок, кН/м2; bп = 2.87- поперечное расстояние между увязочными устройствами вагона, м; с1 = 0.98, с2 = 1.574, с3 = 1.62, с4 = 1.704 – пролеты скоб платформы, м.
Б. Параметры груза и гибких элементов креплений, которые могут быть изменены:
1) Массовые, геометрические и физические параметры конкретного груза:
Q = 588.6 – вес груза в кН (или Q0 = 60 тс); h = 2.1, b = 2 и l = 9.1 – соответст-
175
венно высота, ширина и длина груза в м; b1 = 1 – поперечное расстояние меж- ду монтажными петлями для крайних растяжек, расположенных в узкой части груза, м; h1 = 1.54 - высота монтажных петель крайних растяжек, расположен- ных в узкой части груза, м; t = 0.4 - толщина утолщенной части груза, м; f = 0.55 - коэффициент трения между соприкасающимися поверхностями груза и пола вагона (железобетон о дерево); d = 0.006 и n = 8 –соответственно диаметр про- волоки и число нитей гибкого элемента крепления, м; S0 = 20.1 - начальное на- тяжение гибкого элемента крепления, кН.
2) Геометрические размеры гибких элементов креплений в м:
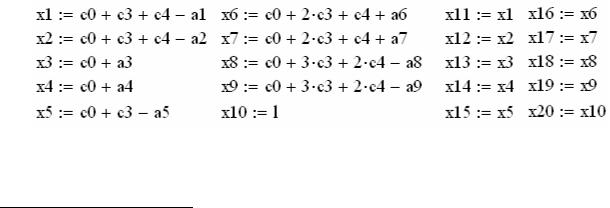
а) проекции элементов креплений на продольную ось вагона (размер, принимаемый только из проекции груза и креплений на горизонтальную плос-
кость, т. е. из вида груза сверху) – a1 = a6 = =0.395, a2 = a7 = =0.695, a3 = a8 =
0.345, a4 = a9 = 0.275, a5 = a10 = 2.034;
б) проекции элементов креплений на поперечную ось вагона – b1 = b2 = =b3
= b4 = b6 = b7 = b8 = b9 = 0.435, b5 = b10= 0.935;
в) проекции элементов креплений на вертикальную ось вагона – h1 = h2 =
=h3 = h4 = h6 = h7 = h8 = h9 = 2.1, h5 = h15 = h10 = h20= 1.54.
3) Кинематические параметры пути и характеристики уклона: скорость движения поезда v = 100 км/ч (или 27.7 м/с), радиус кривой кривого участка пу- ти Rк = 800 м; возвышение рельса Dh = 0.12 мм; высота спуска – DH = 6 м.
4) Кинематические возмущения в м/с2: аех = 0.165×g – переносное ускоре- ние вагона по продольной оси, подбираемое так, чтобы усилие в наиболее по- логом гибком элементе (растяжке) не превышало допустимое значение; аеy = 0.32×g - переносное ускорение вагона по поперечной оси (допустимое значение находится в пределах от 0.1×g до 0.46×g26), аеz = 0.66×g – переносное ускорение вагона по вертикальной оси (допустимое значение находится в пределах от
0.46×g до 0.66×g).
5)Расстояние от края груза до первой скобы в м: с01 = 0.5×l - (1.5c3 + c4) =
0.414.
6)Координаты x верхних монтажных петель груза для закрепления гибких элементов креплений в м:
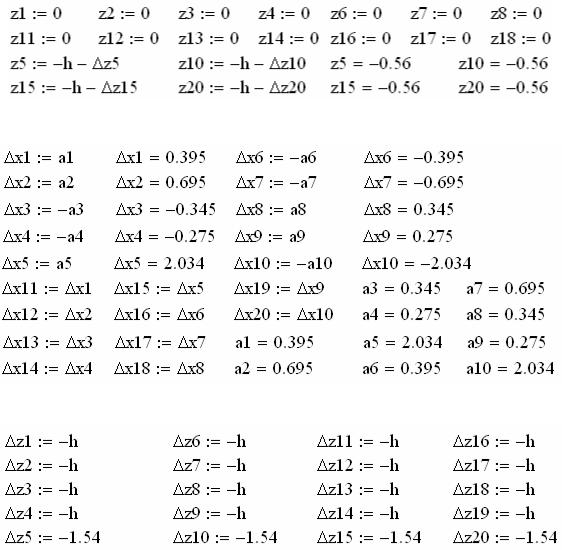
7)Координаты z верхних монтажных петель груза для закрепления гибких элементов креплений в м:
26 Вершинский С.В., Данилов В.Н., Хусидов В.Д. Динамика вагона. - М.:
Транспорт, 1991. - 360 с.
176
8) Проекции гибких элементов креплений на ось x м:
9) Проекции гибких элементов креплений на ось z в м:
В. Все необходимые силовые и геометрические параметры креплений вы- числяются по составленной программе расчета.
С. Задача определения усилий в гибких элементах крепления решена ме- тодом итераций с использованием вычислительной среды MathCAD, согласно которому вначале присвоены начальные значения искомых параметров, а затем введены в блок функции Given–Find система уравнений.
Принятые в ходе вычислительных экспериментов начальные значения ис- комых параметров приведены ниже.
177

.
Д. В блок функций Given-Find введены системы уравнений (8.2), (8.3) и (8.5), (8.6), а также (8.18) … (8.43).
Е. ►Условия проведения вычислительных экспериментов. Отметим, что значения продольного, поперечного и вертикального переносных ускорений ва- гона с грузом в виде aex = 0.165g, aey = 0.32g и aez =0.66g были определены ме- тодом подбора так, чтобы усилия в гибких элементах крепления не превышали бы допустимые значения, равные 39.2 кН (3.92 тс) [2]. При этом замечено, что
значения усилий в гибких элементах крепления в сильной степени зависят от изменения aey и aez. Так, например, увеличение aey или aez даже на величину 0.001g приводит к превышению усилий в гибких элементах крепления больше допустимых значений. Значение вертикального ускорения, равного aez = 0.66g, является верхним допустимым значением для вагона с грузом. Поэтому при
проведении вычислительных экспериментов по определению усилий в гибких элементах крепления от одновременного действия продольных, поперечных и вертикальных сил можно варьировать только значениями продольного и попе- речного переносных ускорений вагона в сторону их уменьшения, оставляя не- изменным значения вертикального переносного ускорения aez = 0.66g. Результа- тами предварительных экспериментов установлено, что уменьшение значений вертикального переносного ускорения (т.е. когда aez < 0.66g) приводит к боль-
шему прижатию груза на пол вагона от действия динамических сил инерции и соответственно этому к увеличению нормальной реакции связи.
Таким образом, предварительными результатами вычислительных экспе- риментов установлено, что при любых значениях продольного и поперечного ускорений, превышающих aex > 0.165g aey => 0.32g, при постоянном значении вертикального переносного ускорения aez = 0.66g усилия в гибких элементах креплений будут превышать допустимые значения 39.2 кН (3.92 тс). При этом нагрузочная способность гибких элементов креплений будет уменьшаться.
Ж. ►Результаты вычислительных экспериментов. В результате прове-
денных вычислительных экспериментов по определению усилий в креплениях груза получены следующие результаты:
∙ сила трения, нормальная реакция связи в кН и координаты точки ее при-
ложения в м
178
∆h = 0,12; v = 100; Rk = 800; f = 0,55; Фx = 89,467; Фy = 154,8; Фz = 388,476; Фцб = 57,876; Wy = 0,955; Wx = 0,125; Q = 588,6;
Fтр0 = f Q = 323,73; Tx = 91,387; Ty = 151,1; N = 571,6; Fтр = f N = 314,358; N/Q = 0,971; xC = 4.55; xN = 4,393; yN = - 0,109;
· перемещения груза по продольной и поперечной осям вагона в м, а так- же поворот вокруг вертикальной оси в град.
∆x = 0,002; ∆y = 0,054; ∆f×180/p = 0,046;
· усилия в гибких элементах креплений, работающих на растяжение по
продольной оси Ox в кН |
|
|
|
|
||
S4 = 31,914; |
S3 = 31,915; |
S6 = 32,74; |
S7 = 32,34; |
S10 |
= 39,13; |
|
S14 = 8,871; |
S13 |
= 9,01; |
S16 = 8,18; |
S17 = 9,19; |
S20 |
= 3,73; |
l4 = 2,162; |
l3 = |
2,172; |
l6 = 2,181; |
l7 = 2,254; |
l10 = 2,717; |
|
· усилия в гибких элементах крепления, работающих на растяжение по
поперечной оси Oy в кН |
|
|
||
S4 |
= 31,91; |
S3 = 31,92; |
S1 = 31,22; S2 = 30,07, |
S5 = 33,92; |
S9 |
= 32, 43; |
S8 = 32,21; |
S6 = 32,74; S7 = 32,34; |
S10 = 39,13; |
l4 = 2,162; |
l3 = 2,172; |
l1 = 2,181; l2 = 2,254; |
l5 = 2,717. |
|
Е. ►Анализ результатов исследований. По результатам вычислительных экспериментов при одновременном действии на груз продольных, поперечных
и вертикальных сил обнаружено явление поворота груза вокруг вертикальной оси по направлению оси отсчета углов (на 0.046 град.).
Возможно, что такое явление произошло за счет перераспределения усилий в гибких элементах крепления из-за перемещения груза как по продольной (на величину 2 мм), так и по поперечной (на величину 54 мм) осей симметрии ва- гона. Особо отметим, что именно на эти расстояния от торцов груза и следует прикрепить упорные бруски для удержания груза от дальнейших сдвигов.
Таким образом, появилась возможность заранее определить расположение упорных брусков в зависимости от конкретной массы и принятого способа кре- пления груза.
Кроме того, установлено, что значение нормальной реакции связи N = 571.56 кН (57.2 тс) меньше значения веса груза Q = 588.6 кН (58.86 тс) в 0.971 раз. Это объясняется тем, что груз как бы “приподнят” от пола вагона верти- кальной силой инерции максимального значения, равного согласно исходным данным 388.476 кН (38.85 тс), хотя груз дополнительно прижат к полу вагона усилиями предварительных натяжений S0i гибких элементов крепления. Кроме того, при смещении груза из своего первоначального положения из-за действия
динамических продольных и вертикальных сил инерции в гибких элементах крепления возникают дополнительные динамические усилия, которые так же будут способствовать дополнительному прижатию груза к полу вагона. Резуль- татами вычислительных экспериментов установлено, что уменьшение значения вертикального переносного ускорения (т. е. когда aez < 0.66g) приводит к увели- чению величины нормальной реакции связи.
179