

9. ЛАБОРАТОРНАЯ РАБОТА № 9. ИССЛЕДОВАНИЕ ОДНОКОНТУРНОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ
Цель работы. Опытное определение регулировочных свойств электропривода, выполненного по замкнутой схеме. Приобретение практических навыков расчёта и настройки по заданным показателям качества реальной системы электропривода. Опытная проверка результата расчёта.
9.1. Теоретическая часть
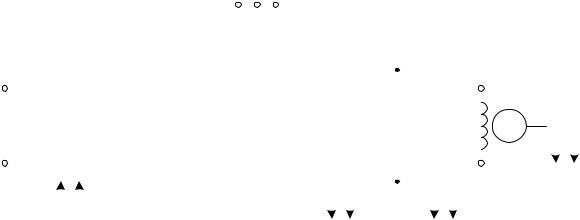
Широкое применение в электроприводах постоянного тока получила статическая система непрерывного действия стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивающая регулирование скорости и её стабилизацию с высокой точностью в статических и динамических режимах. Функциональная схема такой системы приведена на рис. 9.1. Она включает в себя двигатель M, преобразовательU, промежуточный усилитель A, измерительный элемент AW (сумматор) и обратную связь.
~ Uп
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AW |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
||
Uз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A |
|
|
U |
|
|
|
|
|
UV |
|
|
|
M |
BR |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
(Σ) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uс |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
UA |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
uо.с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
uт |
|
|
|
uн |
|
|
|
||||||||||||
|
|
(uс; uн; uт) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
Рис. 9.10. Функциональная схема электропривода постоянного тока
Вкачестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашинные и магнитные усилители, полупроводниковые (транзисторные и тиристорные) управляемые выпрямители, широтно-импульсные преобразователи.
Вкачестве промежуточных усилителей в электроприводах используются электромашинные, магнитные, транзисторные и интегральные усилители.

В системах электропривода используются три основные жёсткие обратные связи: по скорости, напряжению и току двигателя, а также их различные комбинации. Для стабилизации скорости двигателя применяются отрицательные связи по скорости и напряжению и положительная связь по току. Для стабилизации момента двигателя применяется отрицательная связь по току и положительные связи по скорости и напряжению.
Работа электропривода в установившихся и переходных режимах при инерционном преобразователе и постоянном магнитном потоке двигателя описывается системой дифференциальных уравнений:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
±uо.с |
= uу |
|
|
|||||
Uз |
|
|
||||||||
u |
уkу |
= uуп |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
deп |
|
u |
|
k |
|
= e |
|
+T |
||||
|
|
|
dt |
|||||||
|
уп |
|
п |
|
|
п |
|
п |
||
|
|
|
|
ω |
|
|
|
|
|
di |
eп = |
|
|
+iR |
+ L |
|
|||||
|
kд |
dt |
||||||||
|
|
|
|
|
|
|
dω |
|||
|
|
|
|
|
|
= J |
|
|||
M − Mс |
dt |
|
||||||||
|
|
|
|
|
|
|
|
|
||
, (9.1)
или I − I |
с |
= |
J dω |
||
|
|
||||
kΦ dt |
|||||
|
|
||||
где: uз, uо.с, uу, uуп – напряжения: задающее, обратной связи, управления системы, управления преобразователем;
eп – ЭДС преобразователя;
ω – угловая скорость двигателя;
M, i, Mс, iс – момент и ток двигателя, момент и ток статической нагрузки;
kу, kп – коэффициенты усиления промежуточного усилителя и преобразователя;
kд = k1Φ – коэффициент передачи двигателя по скорости;
Tп – постоянная времени преобразователя, которая в общем виде может быть функцией его напряжения управления, Tп = f(uу);
R, L – суммарные сопротивление и индуктивность силовой якорной цепи преобразователь – двигатель, включающие сопротивления и индуктивности двигателя (Rд, Lд), преобразователя (Rп, Lп) и других элементов якорной цепи;
J – момент инерции электропривода с учётом моментов инерции двигателя Jд и механизма Jмех.пр, приведённого к валу двигателя
(J = Jд + Jмех.пр).

Сигналы обратных связей в режиме стабилизации скорости, осуществляемые датчиками скорости BR, напряжения UV и тока UA, которые обычно принимаются безынерционными, соответственно равны:
при связи по скорости при связи по напряжению при связи по току
uс = kсω; uн = kнuд; uт = kтi,
где: kс, kн, kт – коэффициенты обратных связей по скорости, напряжению и току;
uд – напряжение на якоре двигателя; i – ток якоря двигателя;
ω – скорость двигателя.
Передаточная функция системы стабилизации скорости определяется по свёрнутой структурной схеме рис. 9.2, в которой момент статической нагрузки перенесён на вход системы.
Uз |
Uз′ |
kу |
|
|
|
kп |
|
|
|
|
|
|
|
kд |
|
ω |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1+T p |
|
|
|
|
|
|
T T p2 |
+T p +1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
я м |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
WMс (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
kс |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mс
Рис. 9.11
В такой схеме общее воздействие на электропривод равно
Uз′(p)=Uз (p)−Mс(p)WMс (p), |
(9.2) |
где: Uз – управляющее воздействие; Mс – возмущающее воздействие;
WMс (p) – передаточная функция звена, приводящего Mс ко входу системы, равное при действии обратной связи по скорости
WMс (p)= |
Tп p +1 |
|
R |
(Tя p +1). |
(9.3) |
|
kΦ |
||||
|
kуkп |
|
|
||
Окончательно передаточная функция системы имеет вид:
W (p)= |
ω(p) |
kуkпkд |
|
||
|
= |
|
. |
(9.4) |
|
Uз′(p) |
TпTяTм p3 + (Tп +Tя )Tм p2 + (Tп +Tм )p + kсkуkпkд +1 |
||||
Из полученной передаточной функции можно получить уравнение электромеханической характеристики рассматриваемого электропривода. Очевидно, что при Mс = const и p = 0
ω = |
U зkуkпkд − IRkд |
. |
(9.5) |
|
|||
|
1+ kсkдkуkп |
|
|
Уровень стабилизации скорости в замкнутой системе как погрешность ∆ω определяется через погрешность в разомкнутой системе
∆ωр:
∆ω = ∆ωр |
|
|
1 |
|
, |
(9.6) |
1 |
+kсk |
|
||||
|
уkпkд |
|
||||
где ∆ωр = IRkд – погрешность в разомкнутой системе.
Погрешность в замкнутой системе электропривода зависит от значений коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя и тем ниже, чем выше значения указанных коэффициентов.
Заданная погрешность системы электропривода определяет значения коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя. В системе с отрицательной обратной связью по скорости
|
1 |
∆ωр |
|
|
|
|
kсkуkп = |
|
|
|
|
, |
(9.7) |
|
|
|||||
kд |
|
∆ωз |
−1 |
|||
|
|
|
|
|
||
где ∆ωз – заданная погрешность в замкнутой системе.
В требованиях к электроприводам обычно задаётся статизм по отношению к скорости идеального холостого хода:
δ = |
∆ω |
з |
, |
(9.8) |
|
|
|
||||
ω |
0 |
|
|||
|
|
|
|
|
|
или
δ% = |
∆ωз |
100. |
(9.9) |
|
|||
|
ω |
|
|
|
0 |
|
|
При регулировании скорости двигателя вниз от основной в заданном диапазоне D статизм уменьшается в D раз. Поэтому выбор значения произведений коэффициентов при отрицательной связи по скорости производится по уравнению
|
1 |
δр |
|
|
|
|
kсkуkп = |
|
|
|
|
, |
(9.10) |
|
|
|||||
kд |
|
δз |
D −1 |
|||
|
|
|
|
|
||
где: δр = |
|
|
∆ωр |
– статизм разомкнутой системы по отношению к |
|||
|
|
ω |
|||||
|
|
|
|
||||
|
|
|
0.max |
|
|||
максимальной скорости идеального холостого хода; |
|||||||
δз = |
|
|
∆ωз |
|
– заданный статизм; |
||
|
ω |
||||||
|
|
|
|||||
|
|
|
0.min |
|
|||
D = |
ω0.max |
|
– заданный диапазон регулирования скорости. |
||||
ω0.min |
|||||||
|
|
||||||
Из приведённых уравнений обычно определяется требуемый коэффициент усиления промежуточного усилителя. Коэффициенты обратных связей определяются возможностями датчиков, например, тахогенератора, и верхним уровнем задающего напряжения. Коэффициент усиления преобразователя зависит от свойств преобразователя и при выбранном преобразователе бывает известным.
Регулирование скорости двигателя в заданном диапазоне осуществляется изменением задающего сигнала Uз. Значения Uз, как и статизм, зависят от коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя. Определяется Uз обычно их уравнения электромеханической характеристики при идеальном холостом ходе двигателя. Уравнение Uз при действии отрицательной обратной связи по скорости имеет вид
U з = |
ω0 |
(1+kсkдkуkп ). |
(9.11) |
|
|||
|
kуkпkд |
|
|
Введение обратных связей изменяет структуру системы, оказывает влияние на её устойчивость и характер переходных процессов по сравнению с разомкнутой системой.

Устойчивость замкнутой системы можно оценить, используя критерий Гурвица, который для передаточной функции третьего порядка
k |
(9.12) |
α3 p3 +α2 p2 +α1 p +(1+ kkс ) |
имеет вид
α1α2 >α3 (1+kkс ). |
(9.13) |
Таким образом, замкнутый по скорости рассматриваемый электропривод будет устойчив, если выполняется неравенство
(Tп +Tя )(Tп +Tм )> TпTя (1+ kуkпkдkс ). |
(9.14) |
Отсюда следует, что при увеличении произведения kуkпkдkс замкнутая система третьего порядка может стать неустойчивой.
Качество переходного процесса, как известно, оценивается перерегулированием
σ = |
ωmax −ωу |
100 , |
(9.15) |
|
|||
|
ωу |
|
|
где ωу – частота вращения двигателя в установившемся режиме;
и временем регулирования tр, которым оценивается длительность переходного процесса. В идеальной линейной системе переходный процесс бесконечен, поэтому временем регулирования tр считают интервал времени, по истечении которого отклонения скорости от установившегося значения не превышают определённой величины ∆. Значение ∆ выбирают обычно 5 %. Перерегулирование и время регулирования можно определить по графику переходного процесса.
9.2. Подготоака к выполнению работы
1. По паспортным данным двигателя для разомкнутой системы рассчитать: скорость идеального холостого хода, соответствующую напряжению на якоре 105 В; номинальный перепад угловой скорости; статизм при работе на данной характеристике. По заданному максимальному значению статизма определить диапазон регулирования,
минимальную скорость холостого хода в данном диапазоне и соответствующее ей напряжение на якоре.
2. По требуемой величине статизма в замкнутой по скорости системе рассчитать: коэффициент усиления регулятора скорости kу, необходимое значение задающего сигнала для получения максимального и минимального значения скорости идеального холостого хода в рассчитанном диапазоне регулирования Uз.max, Uз.min. Коэффициент усиления цепи обратной связи по скорости kс принять в диапазоне 0,035 –
0,045.
9.3. Выполнение работы
ВНИМАНИЕ! ПЕРЕД ВКЛЮЧЕНИЕМ ПИТАНИЯ СТЕНДА ВСЕ ТУМБЛЕРЫ ДОЛЖНЫ НАХОДИТЬСЯ В ОТКЛЮЧЕННОМ СОСТОЯНИИ (НИЖНЕЕ ПОЛОЖЕНИЕ); ДВИЖОК РЕЗИСТОРА R201 ДОЛЖЕН НАХОДИТЬСЯ ПРИМЕРНО В СРЕДНЕМ ПОЛОЖЕНИИ; ДВИЖКИ ОСТАЛЬНЫХ ПЕРЕМЕННЫХ РЕЗИСТОРОВ ДОЛЖНЫ НАХОДИТЬСЯ В КРАЙНЕМ ЛЕВОМ ПОЛОЖЕНИИ.
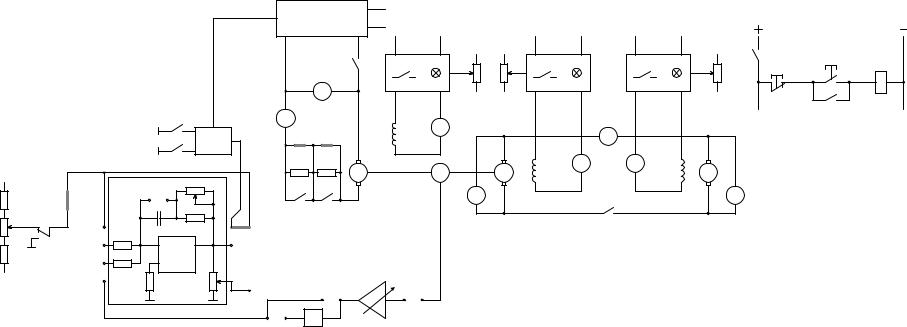
1.Собрать схему рис. 9.3.
2.Включить питание стенда. Включить ШИП–1 и ШИП–2 (SA300, SA301). Резистором R300 установить ток возбуждения машины M1 400 мА (PA1). Резистором R301 установить ток возбуждения машины M2 равным 0 (PA2). Включить ШИП (SA100). Движок резистора R201 установить в среднее положение. Включить SA200. Включить питание релейноконтакторной части стенда (SA700). Включить SA1. Включить контактор K5 (SB704). Резистором R201 установить напряжение на якоре M1 105 В
(PA10). Резистором Kω установить принятую величину коэффициента усиления в цепи обратной связи по скорости (измеряя тестером величину напряжения на выходе усилителя). Увеличивая ток возбуждения машины M2 резистором R302, снять электромеханическую характеристику M1 (не менее 5 точек). ВНИМАНИЕ!!! При снятии характеристики следить,
чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА. Результаты измерений занести в таблицу (табл. 9.1). Уменьшить ток возбуждения M2 до нуля
(R301, PA2).
|
|
|
|
Таблица 9.1 |
Ua1, В |
Ia1, А |
Iв2, мА |
Iа2, А |
M, |
(PV10) |
(PA10) |
(PA2) |
(PA4) |
Н м |
|
|
|
|
|
|
|
|
|
ШИП |
|
~ U2 |
|
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
R300 |
|
|
|
|
|
|
V |
|
ШИП-1 |
|
– |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
A PA10 |
|
|
|
A |
PA1 |
||
|
|
|
|
|
|
|
ОВМ1 |
|||
|
|
SA101 |
CPU |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+15 В |
|
|
R211 |
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 V |
|
|
|
|
|
|
|
|
|
||
|
C201 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R201 |
SA200 |
A3 |
R212 |
|
|
|
|
|
|
|
R209 |
|
|
|
|
|
|
||||
|
– |
|
|
|
|
|
|
|
|
|
R202 |
R210 |
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
–15 В |
R214 |
|
|
R213 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
РС |
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 |
Kω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 9.12
|
~ U1 |
|
~ U1 |
|
|
|
||
+ |
|
|
|
|
|
+ |
SA700 |
SB704 |
|
SA301 |
HL301 |
|
SA302 |
HL302 |
|
||
|
|
|
|
|||||
R301 |
|
R302 |
SB703 |
K5 |
||||
– |
ШИП-2 |
|
ШИП-3 |
– |
|
K5.1 |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
PA4 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
M2 |
ОВМ2 |
A PA2 |
PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
||||
|
|
SA1 |
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
||
3. Резистором R201 установить на якоре M1 рассчитанную величину минимального напряжения. Увеличивая ток возбуждения машины M2 резистором R302, снять электромеханическую характеристику M1 при минимальной частоте вращения (не менее 5 точек).
ВНИМАНИЕ!!! При снятии характеристики следить, чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА. Результаты измерений занести в таблицу
(табл. 9.1).
4.Уменьшить ток возбуждения машины M2 до нуля (R301). Уменьшить частоту вращения M1 до нуля (R201). Отключить якорь M1 от ШИП (SB703).
5.Собрать схему рис. 9.4, не замыкая обратную связь по скорости.
Подключить якорь M1 к ШИП (SB704). Задав резистором R201 скорость вращения M1 20–30 с–1, при помощи тестера определить знаки сигнала задания (инвертирующий вход усилителя A3) и сигнала обратной связи по
скорости (выход усилителя Kω). Резистором R211 установить рассчитанное значение коэффициента усиления регулятора скорости Уменьшить частоту вращения M1 до нуля. Отключить якорь M1 от ШИП (SB703). Если знаки сигналов задания и обратной связи по скорости одинаковы, сигнал обратной связи по скорости необходимо подать на R210 через инвертор (–1). Замкнуть обратную связь по скорости.
6. Включить контактор K5 (SB704). Резистором R201 установить рассчитанное значение Uз.max. Увеличивая ток возбуждения машины M2 резистором R302, снять электромеханическую характеристику M1 (не менее 5 точек). ВНИМАНИЕ!!! При снятии характеристики следить,
чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА. Результаты измерений занести в таблицу (табл. 9.1). Уменьшить ток возбуждения M2 до нуля
(R301, PA2).
7. Резистором R201 установить рассчитанное значение Uз.min. Увеличивая ток возбуждения машины M2 резистором R302, снять электромеханическую характеристику M1 при минимальной частоте вращения (не менее 5 точек). ВНИМАНИЕ!!! При снятии
характеристики следить, чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА.
Уменьшить ток возбуждения M2 до нуля (R301, PA2). Уменьшить частоту вращения M1 до нуля (R201, ИС1). Отключить якорь M1 от ШИП (SB703). Выключить SA200, затем SA100. Выключить РКСУ (SA700). Уменьшить ток возбуждения M1 до нуля (R300, PA1). Выключить ШИП–1 (SA300), ШИП–2 (SA301). Выключить стенд.

|
|
|
ШИП |
|
~ U2 |
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
K5.1 |
SA300 |
HL300 |
R300 |
|
|
|
|
V |
|
ШИП-1 |
|
– |
|
|
|
|
|
|
|
|
||
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
A PA10 |
|
|
|
A |
PA1 |
|
|
|
|
|
|
ОВМ1 |
|||
|
SA101 |
CPU |
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
|
|
|
|
||
+15 В |
R211 |
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
|
||
R200 |
K10.1 |
K8.1 |
PV1 |
V |
|
|
|||
C201 |
|
|
|
|
|
|
|
|
R201 |
SA200 |
A3 |
R212 |
|
R209 |
||||
|
– |
|
||
R202 |
R210 |
|
||
+ |
|
|||
|
|
|
||
–15 В |
R214 |
|
R213 |
|
|
|
|||
|
|
РС |
|
–1 Kω
Рис. 9.13
|
~ U1 |
|
~ U1 |
|
|
|
||
+ |
|
|
|
|
|
+ |
SA700 |
SB704 |
|
SA301 |
HL301 |
|
SA302 |
HL302 |
|
||
R301 |
|
R302 |
SB703 |
K5 |
||||
– |
ШИП-2 |
|
ШИП-3 |
– |
|
K5.1 |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
PA4 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
M2 |
ОВМ2 |
A PA2 |
PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
||||
|
|
SA1 |
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
||
9.4. Обработка результатов измерений.
2.Рассчитать электромагнитный момент двигателя M1.
3.Построить графики электромеханических и механических характеристик двигателя постоянного тока независимого возбуждения в разомкнутой и замкнутой по скорости системах.
4.Для каждой из полученных характеристик рассчитать значения
жёсткости β, перепада угловой скорости при приложении номинального момента в абсолютных ∆ω и относительных δ единицах.
5. Сравнить экспериментально полученные значения с рассчитанными при подготовке к работе.
9.5. Контрольные вопросы
1.Объясните назначение всех элементов рассматриваемого электропривода.
2.Какими способами можно осуществить стабилизацию скорости в замкнутой системе электропривода?
3.Как влияет ограничение выходного сигнала промежуточного усилителя на эффект стабилизации скорости в замкнутой системе?
4.С какой целью в электроприводе используется отрицательная обратная связь по частоте вращения?
5.Как влияет величина коэффициента усиления промежуточного усилителя на устойчивость системы?
9.6. Требования к содержанию отчёта
Отчёт по лабораторной работе должен содержать: название лабораторной работы; цель лабораторной работы; чертёж исследуемой схемы; таблицу с результатами измерений; графики электромеханических
имеханических характеристик двигателя постоянного тока в разомкнутой
изамкнутой по скорости системах; результаты расчётов, выводы по работе.