

10. ЛАБОРАТОРНАЯ РАБОТА № 10. ИССЛЕДОВАНИЕ ОДНОКОНТУРНОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ТОКА
Цель работы. Исследование статических характеристик одноконтурной системы электропривода с обратной связью по току.
10.1. Теоретическая часть
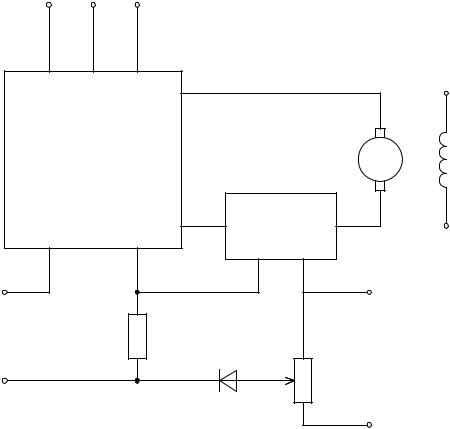
С помощью отрицательной обратной связи по току в системах электропривода достигается стабилизация момента двигателя. Эта связь обеспечивает резкое снижение скорости при приблизительно постоянном моменте. Как правило, такая обратная связь используется с отсечкой, исключающей действие связи при низких нагрузках. Это обусловлено необходимостью защиты двигателя или механизма от недопустимых перегрузок в статических и динамических режимах. Стабилизация момента в установившихся режимах необходима в приводах механизмов, работающих с резкопеременной нагрузкой или на упор. В большинстве же электроприводов стабилизация момента используется для осуществления необходимых динамических режимов. Отсечка осуществляется введением в цепь обратной связи опорного напряжения Uо.т и вентиля V (рис. 10.1), обеспечивающих действие обратной связи только при превышением сигналом uт значения опорного напряжения .
Электромеханическая характеристика электропривода постоянного тока (рис. 10.1) с токовой отсечкой имеет вид:
|
|
kп kт |
|
|
|
|
|
||
|
R + R |
|||
|
[uз +uо.т 1(∆I )] kп − I (Ra + Rп ) 1+ |
1(∆I ) |
||
ω = |
|
a п |
|
, (10.1) |
kΦ |
|
|
||
|
|
|
|
|
где: kп – коэффициент усиления преобразователя;
kт – коэффициент передачи цепи обратной связи по току; Rп – сопротивление преобразователя;
uз – напряжение задания;
1(∆I )=1(I − Iотс ) – единичная функция по току, равная нулю при I < Iотс и единице при I > Iотс.
~
Силовой преобразователь M
Kп
Датчик
тока
Kт
Uт 
Uз |
Uо.c |
V Uо.т
Рис. 10.14
10.2. Выполнение работы
ВНИМАНИЕ! ПЕРЕД ВКЛЮЧЕНИЕМ ПИТАНИЯ СТЕНДА ВСЕ ТУМБЛЕРЫ ДОЛЖНЫ НАХОДИТЬСЯ В ОТКЛЮЧЕННОМ СОСТОЯНИИ (НИЖНЕЕ ПОЛОЖЕНИЕ); ДВИЖОК РЕЗИСТОРА R201 ДОЛЖЕН НАХОДИТЬСЯ ПРИМЕРНО В СРЕДНЕМ ПОЛОЖЕНИИ; ДВИЖКИ ОСТАЛЬНЫХ ПЕРЕМЕННЫХ РЕЗИСТОРОВ ДОЛЖНЫ НАХОДИТЬСЯ В КРАЙНЕМ ЛЕВОМ ПОЛОЖЕНИИ.
1.Собрать схему рис. 10.2. Включить автомат питания. Включить SA200. Вращая R201 против часовой стрелки, задать некоторое значение входного напряжения на ОУ A4 и измерить его тестером с учётом знака. Подключив тестер к выходу ОУ4 резистором R217 установить коэффициент усиления ОУ равным –1 (выходное напряжение должно быть равно по модулю входному). Отключить SA200. Выключить автомат питания.
2.Собрать схему рис. 10.3. Включить автомат питания. Включить
SA700. Включить ШИП–1 и ШИП–2 (SA300, SA301). Резистором R300
установить ток возбуждения машины M1 400 мА (PA1). Резистором R301
установить ток машины M2 равным нулю (PA2). Включить SA1. Включить SA100, SA200. Движок R201 установить в примерно среднее положение. Кнопкой SB704 подключить якорь M1 к ШИП. Вращая движок R201 против часовой стрелки, установить напряжение ШИП равным 70 – 80 В. Изменяя резистором R301 ток возбуждения машины M2 (PA2), измерить ток якоря M1 и выходное напряжение усилителя обратной связи по току (Ki) (с учётом знака). Если знак напряжения на выходе Ki и знак сигнала задания совпадают, в дальнейшем необходимо использовать инверсный выход Ki. Вращая регулятор Ki, вычислить минимальное и максимальное значение коэффициента обратной связи по току.
3.Рассчитать для заданных значений kт соответствующие выходные напряжения Ki при токе якоря M1, равным 0,5 А. Установив с помощью R301 ток возбуждения M2 таким, чтобы ток якоря M1 был равен 0,5 А, установить при помощи регулятора Ki напряжение на выходе ОУ Ki,
соответствующее заданному kт. Уменьшить частоту вращения M1 до нуля (R201). Отключить якорь M1 от ШИП (SB703). Уменьшить токи возбуждения M1 и M2 до нуля. Отключить SA200, SA100. Отключить ШИП–1 и ШИП–2 (SA300, SA301). Выключить автомат питания стенда.
4.Собрать схему рис. 10.4. Включить автомат питания стенда. Включить ШИП–1 и ШИП –2 (SA300, SA301). Установить ток возбуждения M1 400 мА, М2 – равным нулю. Включить SA700. Включить SA100, SA200. Движок R201 установить в примерно среднее положение. Подключить якорь M1 к ШИП (SB704). Вращая R201 против часовой стрелки, установить напряжение на якоре M1 70 – 80 В.
5.Изменяя ток возбуждения M2 (5 – 6 значений), снять электромеханическую характеристику системы с обратной связью по току (скорость M1 – ИС1; ток якоря M1 – PA10). ВНИМАНИЕ!!! При снятии
характеристики следить, чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА.
Результаты измерений занести в таблицу.
6.Установив с помощью R301 ток возбуждения M2 таким, чтобы ток якоря M1 был равен 0,5 А, установить при помощи регулятора Ki
напряжение на выходе ОУ Ki, соответствующее другому значению kт. Повторить для полученного значения kт п. 5.
7.Уменьшить частоту вращения M1 до нуля (R201). Отключить якорь M1 от ШИП (SB703). Отключить SA700. Уменьшить токи возбуждения M1 и M2 до нуля. Отключить SA200, SA100. Отключить ШИП–1 и ШИП–2 (SA300, SA301). Выключить автомат питания стенда.
|
|
|
|
|
Таблица 10.1 |
|
Ua1, В |
Ia1, А |
Iв2, мА |
Iа2, А |
ω1, с–1 |
|
M, |
(PV10) |
(PA10) |
(PA2) |
(PA4) |
(ИС1) |
|
|
|
|
Н м |
||||
|
|
|
|
|
|
|

SA100 |
|
SA101 |
CPU |
|
Ki |
|
-1 |
+15 В
R200
R201 SA200
R202
–15 В
ШИП |
~ U2 |
~ U1
+
|
|
K5.1 |
ДТ |
V |
|
PV10 |
|
|
|
|
|
A PA10 |
|
|
R911 |
R912 |
M1 |
|
||
K10.1 |
K8.1 |
|
R217
C202 |
R215 |
A4 |
R218 |
– |
|
|
R216 |
|
|
+ |
|
|
|
|
|
R219 |
|
R220 |
|
РТ |
|
SA300 HL300 R300
ШИП-1
–
A PA1
ОВМ1
BR1
PV1 V
Рис. 10.2
|
~ U1 |
|
~ U1 |
|
|
|
||
+ |
|
|
|
|
|
+ |
SA700 |
SB704 |
|
SA301 |
HL301 |
|
SA302 |
HL302 |
|
||
R301 |
|
R302 |
SB703 |
K5 |
||||
– |
ШИП-2 |
|
ШИП-3 |
– |
|
K5.1 |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
PA4 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
M2 |
ОВМ2 |
A PA2 |
PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
||||
|
|
SA1 |
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
||

SA100 |
|
SA101 |
CPU |
|
Ki |
|
-1 |
+15 В
R200
R201 SA200
R202
–15 В
ШИП |
~ U2 |
~ U1
+
|
|
K5.1 |
ДТ |
V |
|
PV10 |
|
|
|
|
|
A PA10 |
|
|
R911 |
R912 |
M1 |
|
||
K10.1 |
K8.1 |
|
R217
C202 |
R215 |
A4 |
R218 |
– |
|
|
R216 |
|
|
+ |
|
|
|
|
|
R219 |
|
R220 |
|
РТ |
|
SA300 HL300 R300
ШИП-1
–
A PA1
ОВМ1
BR1
PV1 V
Рис. 10.3
|
~ U1 |
|
~ U1 |
|
|
|
||
+ |
|
|
|
|
|
+ |
SA700 |
SB704 |
|
SA301 |
HL301 |
|
SA302 |
HL302 |
|
||
R301 |
|
R302 |
SB703 |
K5 |
||||
– |
ШИП-2 |
|
ШИП-3 |
– |
|
K5.1 |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
PA4 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
M2 |
ОВМ2 |
A PA2 |
PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
||||
|
|
SA1 |
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
||
SA100 |
|
SA101 |
CPU |
|
Ki |
|
-1 |
+15 В
R200
R201 SA200
R202
–15 В
ШИП |
~ U2 |
~ U1
+
|
|
K5.1 |
ДТ |
V |
|
PV10 |
|
|
|
|
|
A PA10 |
|
|
R911 |
R912 |
M1 |
|
||
K10.1 |
K8.1 |
|
R217
C202 |
R215 |
A4 |
R218 |
– |
|
|
R216 |
|
|
+ |
|
|
|
|
|
R219 |
|
R220 |
|
РТ |
|
SA300 HL300 R300
ШИП-1
–
A PA1
ОВМ1
BR1
PV1 V
Рис. 10.4
|
~ U1 |
|
~ U1 |
|
|
|
||
+ |
|
|
|
|
|
+ |
SA700 |
SB704 |
|
SA301 |
HL301 |
|
SA302 |
HL302 |
|
||
R301 |
|
R302 |
SB703 |
K5 |
||||
– |
ШИП-2 |
|
ШИП-3 |
– |
|
K5.1 |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
PA4 |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
M2 |
ОВМ2 |
A PA2 |
PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
||||
|
|
SA1 |
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
||
10.3. Обработка результатов измерений.
1.Рассчитать электромагнитный момент двигателя M1.
2.Построить графики электромеханических и механических характеристик двигателя постоянного тока независимого возбуждения в замкнутой по току системе при различных коэффициентах усиления цепи обратной связи по току.
3.Для каждой из полученных характеристик рассчитать значения
жёсткости β, перепада угловой скорости при приложении номинального момента в абсолютных ∆ω и относительных δ единицах.
10.4. Контрольные вопросы
1.Каково назначение отрицательной обратной связи по току?
2.Изобразить электромеханическую характеристику электропривода постоянного тока с отсечкой по току.
3.Перечислить принципы построения замкнутых систем регулируемого электропривода.
4.Достоинства и недостатки систем с одним общим суммирующим усилителем.