


4. ЛАБОРАТОРНАЯ РАБОТА № 4. ИССЛЕДОВАНИЕ РЕГУЛИРОВОЧНЫХ СВОЙСТВ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ В СИСТЕМЕ «ГЕНЕРАТОР-ДВИГАТЕЛЬ»
Цель работы: Приобретение практических навыков в регулировке двигателя постоянного тока независимого возбуждения в системе «генератор-двигатель». Экспериментальное подтверждение теоретических сведений о работе системы «генератор-двигатель».
4.1. Теоретическая часть.
Принципиальная схема включения двигателя постоянного тока с независимым возбуждением в системе «генератор-двигатель» (Г-Д) приведена на рис. 4.1. Генератор M2 приводится во вращение асинхронным двигателем M1. Питание цепей возбуждения генератора M2 и двигателя M3 осуществляется от независимых источников постоянного тока. Якорь двигателя M3 присоединяется непосредственно к якорю генератора M2. ЭДС генератора определяется по выражению
Eг = kгФгωг |
(4.1) |
где: ωг – угловая скорость генератора; Фг – магнитный поток генератора;
kг – конструкционный коэффициент генератора.
~
M1 |
M2 |
M3 |
 ОВМ2
ОВМ2
 ОВМ3
ОВМ3
Рис. 4.4

Следовательно, при постоянной частоте генератора его ЭДС будет определяться величиной магнитного потока, который можно регулировать током возбуждения генератора.
В соответствии со вторым законом Кирхгофа для цепи якорей машин M2 и M3 можно записать:
Eг − E = I(Rг + Rд ), |
(4.2) |
или
Eг −kФω = I(Rг + Rд ),
где: I – ток якорной цепи генератора и двигателя; Rг – сопротивление якорной цепи генератора; Rд – сопротивление якорной цепи двигателя; E – ЭДС двигателя;
Ф – магнитный поток двигателя; ω – угловая скорость двигателя;
k – конструкционный коэффициент двигателя. Отсюда угловая скорость двигателя
ω = Eг − I(Rг + Rд ). kΦ kΦ
(4.3)
(4.4)
Подставив выражение для электромагнитного момента двигателя
M |
|
|
I = kФ |
, |
(4.5) |
получим уравнение механической характеристики:
ω = |
Eг |
− |
Rг + Rд |
M . |
(4.6) |
kФ |
2 |
||||
|
|
(kФ) |
|
||
Механические характеристики двигателя располагаются в четырёх квадрантах (рис. 4.2). Как видно, система Г-Д обеспечивает двухзонное регулирование скорости – вниз от основной скорости изменением ЭДС генератора при постоянном магнитном потоке двигателя и вверх от основной скорости – уменьшением тока возбуждения двигателя при постоянной ЭДС генератора, равной её номинальному значению.
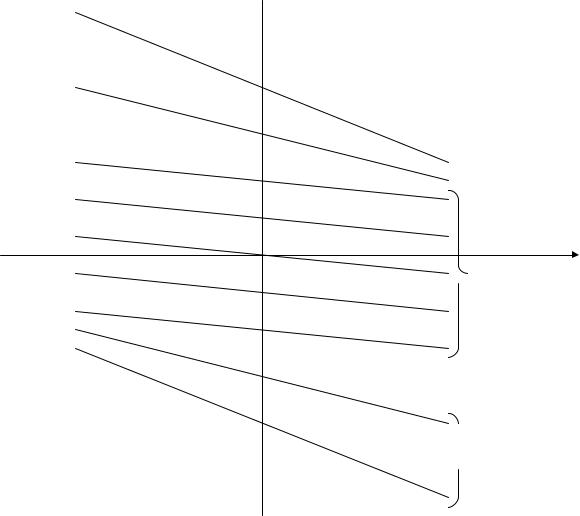
ω
 Eг = const
Eг = const  Фд = var
Фд = var
M
 Eг = var Фд = const
Eг = var Фд = const
 –Eг = const
–Eг = const  Фд = var
Фд = var
Рис. 4.5
Верхний предел регулирования скорости при постоянном потоке двигателя ограничивается номинальным значением ЭДС генератора. Нижний предел регулирования определяется заданным относительным перепадом угловой скорости при заданном изменении нагрузки. Этот относительный перепад, называемый статизмом, определяется при минимальной скорости идеального холостого хода ω0min для случая изменения момента нагрузки от нуля до Mном как
δ = |
∆ωном |
(4.7) |
|
ω0 min |
|
или
|
R |
г |
+ R |
ω0 max(I ) |
|
|
|
δ = |
|
д |
Iном |
|
, |
(4.8) |
|
|
|
|
ω0 min |
||||
|
Eг.ном |
|
|
||||
гдe ω0max(I) – максимальная скорость идеального холостого хода при регулировании скорости в первой зоне, соответствующая номинальной
ЭДС генератора Eг.ном.
Отсюда допустимый диапазон регулирования
Dдоп = |
ω0 max(I ) |
= |
|
Eг.номδ |
|
= |
δ |
, |
(4.9) |
|||||
ω |
0 min |
I |
ном |
(R |
г |
+ R |
) |
Dω |
ном |
|||||
|
|
|
|
|
д |
|
|
|
|
|
||||
где: ∆ω ном – относительный перепад угловой скорости при Eг.ном:
∆ω ном = |
ω0 max(I ) −ωном |
. |
(4.10) |
|
ω0 max(I ) |
||||
|
|
|
4.2. Подготовка к выполнению работы
Для заданной преподавателем величины статизма по паспортным данным машин M1, M2 рассчитать допустимый диапазон регулирования скорости в системе Г-Д вниз от основной.
4.3. Порядок выполнения работы.
ВНИМАНИЕ! ПЕРЕД ВКЛЮЧЕНИЕМ ПИТАНИЯ СТЕНДА ВСЕ ТУМБЛЕРЫ ДОЛЖНЫ НАХОДИТЬСЯ В ОТКЛЮЧЕННОМ СОСТОЯНИИ (НИЖНЕЕ ПОЛОЖЕНИЕ); ДВИЖОК РЕЗИСТОРА R201 ДОЛЖЕН НАХОДИТЬСЯ ПРИМЕРНО В СРЕДНЕМ ПОЛОЖЕНИИ; ДВИЖКИ ОСТАЛЬНЫХ ПЕРЕМЕННЫХ РЕЗИСТОРОВ ДОЛЖНЫ НАХОДИТЬСЯ В КРАЙНЕМ ЛЕВОМ ПОЛОЖЕНИИ.
1. Собрать схему рис 4.3. Включить питание стенда, после загрузки включить ШИП–1, ШИП–2 и ШИП–3 тумблерами SA300, SA301, SA302. Установить токи возбуждения машин M1 – M3 резисторами R300 – R302 400 мА.

|
|
ШИП |
|
~ U2 |
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
K5.1 |
SA300 |
HL300 |
R300 |
|
|
|
|
V |
|
ШИП-1 |
|
– |
|
|
|
|
|
|
|
|
||
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
A PA10 |
|
|
|
A |
PA1 |
|
|
|
|
|
|
ОВМ1 |
|||
|
SA101 |
CPU |
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
|
|
|
|
||
+15 В |
|
|
|
|
|
BR1 |
|
|
R200 |
|
K10.1 |
K8.1 |
|
|
|
|
PV1 V |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
R201 |
SA200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R202 |
|
|
|
|
|
|
|
|
–15 В |
|
|
|
|
|
|
|
|
|
|
|
|
|
БУ |
Инвертор |
~ U2 |
SB700 |
|
|
|
|
|
|
|
|
|
SA700 |
SB701 |
K1 |
|
|
~ U1 |
~ U1 |
|
|
|
|||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
+ |
|
|
|
|
+ |
|
K1 |
|
|
|
|
SA301 |
HL301 |
SA302 |
HL302 |
|
|
|
|
|
|
R301 |
R302 |
|
|
K1.1 |
SB704 |
|
||||
|
ШИП-2 |
ШИП-3 |
|
|
SB703 |
|
K5 |
|||
– |
– |
|
|
|
||||||
|
|
|
|
|
V PV3 |
|
|
|
||
|
|
|
|
|
|
|
|
K5.1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PA4 |
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
A PA5 |
|
|
|
|
M2 |
ОВМ2 |
A PA2 PA3 |
A |
ОВМ3 |
M3 |
|
|
|
|
|
|
|
BR2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
PV2 |
V |
|
SA1 |
|
|
|
K9.1 |
K9.2 |
|
|
R900-R902 |
|
K11.1 |
K11.2 |
|
|
R903-R905 |
Рис. 4.3.
2.Включить релейно-контакторную часть стенда тумблером SA700. Включить SA1. Кнопкой SB700 подключить M4 к инвертору. Установить резистором R402 частоту инвертора 25 Гц, затем резистором R401 напряжение 110 В. Установить R201 примерно в среднее положение, включить SA100, затем SA200. Кнопкой SB704 подключить якорь M1 к ШИП. Вращая R201, установить величину тока в цепи якорей машин M2, M3 равной нулю (PA4). Увеличить выходную частоту инвертора до 50 Гц (R402), затем его напряжение до 220 В (R401, PV3). Установить величину тока в цепи якорей машин M2, M3 равной нулю (R201, PA4).
3.Снять естественную характеристику системы Г-Д. Зафиксировать
величину ω0max(I), (токи возбуждения машин M1 – M3 400 мА, ток якоря машин M2, M3 равен нулю, частота на выходе инвертора 50 Гц,
напряжение 220 В). Вращая R201 в сторону, соответствующую уменьшению скорости агрегата M1 – M2, снять 5 – 6 точек характеристики. ВНИМАНИЕ! При снятии характеристики не
допускать увеличения токов якорей машин М1 – М3 и статора M4
более 3 А! Результаты измерений занести в таблицу (табл. 4.1).
|
|
|
|
|
|
|
Табл. 4.1 |
Ua1, В |
Ia1, А |
Ua2–3, В |
Ia2–3, А |
Iв2, мА |
Iв3, мА |
ω1, с–1 |
M, Н м |
(PV10) |
(PA10) |
(PV1) |
(PA4) |
(PA2) |
(PA3) |
(ИС1) |
|
|
|
|
|
|
|
|
|
4.Резистором R201 уменьшить ток якорей машин M2, M3 до нуля.
5.Рассчитать минимальную скорость идеального холостого хода
ω0min(I), соответствующую расчётному значению диапазона регулирования. 6. Уменьшая ток возбуждения генератора M3, одновременно поддерживая резистором R201 ток якорей машин M2, M3 (PA4) равным нулю, установить значение скорости агрегата M1 – M2 равным
рассчитанному значению ω0min(I). Вращая R201 в сторону, соответствующую уменьшению скорости агрегата M1 – M2, снять 5 – 6
точек характеристики. ВНИМАНИЕ! При снятии характеристики не
допускать увеличения токов якорей машин М1 – М3 и статора M4
более 3 А! Результаты измерений занести в таблицу (табл. 4.1). Резистором R201 уменьшить ток якорей машин M2, M3 до нуля.
7. Увеличивая ток возбуждения генератора M3, одновременно поддерживая резистором R201 ток якорей машин M2, M3 (PA4) равным нулю, установить значение скорости агрегата M1 – M2 равным
промежуточному значению между ω0max(I) и ω0min(I). Вращая R201 в сторону, соответствующую уменьшению скорости агрегата M1 – M2, снять 5 – 6
точек характеристики. ВНИМАНИЕ! При снятии характеристики не
допускать увеличения токов якорей машин М1 – М3 и статора M4
более 3 А! Результаты измерений занести в таблицу (табл. 4.1). Установить
величину тока в цепи якорей машин M2, M3 равной нулю (R201, PA4). Установить ток возбуждения генератора M3 400 мА (R302, PA3). Установить величину тока в цепи якорей машин M2, M3 равной нулю
(R201, PA4).
8. Рассчитать максимальную скорость идеального холостого хода
ω0max(II) при регулировании во второй зоне, соответствующую значению диапазона регулирования 1,5 : 1.
9. Уменьшая ток возбуждения двигателя M2, одновременно поддерживая резистором R201 ток якорей машин M2, M3 (PA4) равным нулю, установить значение скорости агрегата M1 – M2 равным
рассчитанному значению ω0max(II). Вращая R201 в сторону, соответствующую уменьшению скорости агрегата M1 – M2, снять 5 – 6
точек характеристики. ВНИМАНИЕ! При снятии характеристики не
допускать увеличения токов якорей машин М1 – М3 и статора M4
более 3 А! Результаты измерений занести в таблицу (табл. 4.1). Уменьшить ток якорей машин M2, M3 до нуля (R201, PA4).
10.Увеличивая ток возбуждения двигателя M2, одновременно поддерживая резистором R201 ток якорей машин M2, M3 (PA4) равным нулю, установить значение скорости агрегата M1 – M2 равным
промежуточному значению между ω0max(II) и ω0max(I). Вращая R201 в сторону, соответствующую уменьшению скорости агрегата M1 – M2, снять
5 – 6 точек характеристики. ВНИМАНИЕ! При снятии характеристики
не допускать увеличения токов якорей машин М1 – М3 и статора M4
более 3 А! Результаты измерений занести в таблицу (табл. 4.1). Установить ток возбуждения двигателя M2 400 мА (R301, PA2). Установить величину тока в цепи якорей машин M2, M3 равной нулю (R201, PA4).
11.Установить ток якоря машины M1 (R201, PA10) равным нулю. Отключить якорь M1 от ШИП (SB703). Выключить SA200, SA100. Плавно уменьшить напряжение на выходе инвертора (R401, PA5) примерно до 110 В, затем уменьшить частоту (R402) примерно до 25 Гц. В той же последовательности (сначала напряжение, затем частота) уменьшить напряжение и частоту на выходе инвертора до нуля. Отключить M4 от инвертора (SB701). Отключить SA700. Уменьшить токи возбуждения машин M1 – M3 до нуля ( R300, PA1, R301, PA2, R302, PA3). Отключить ШИП1 – ШИП3 (SA300, SA301, SA302). Отключить питание стенда.
4.4. Обработка результатов измерений.
1. Рассчитать электромагнитный момент двигателя M2 по выражению
M = kΦIа ,
учитывая, что характеристики снимались при различных значениях потока машины.
2.Построить графики электромеханических и механических характеристик двигателя постоянного тока независимого возбуждения в системе Г-Д.
3.Для каждой из полученных характеристик рассчитать значения
жёсткости β, перепада угловой скорости при приложении номинального момента в абсолютных ∆ω и относительных δ единицах.
4.5. Контрольные вопросы
1.Что представляет собой система Г-Д?
2.Какие способы регулирования скорости двигателя постоянного тока с независимым возбуждением возможны в системе Г-Д?
3.Какие достоинства и недостатки имеет система Г-Д?
4.Как изменится скорость двигателя постоянного тока в системе Г-
Дпри уменьшении тока возбуждения генератора?
5.Какую величину имеет диапазон регулирования скорости в системе Г-Д при изменении тока возбуждения двигателя / генератора? Чем ограничен диапазон регулирования скорости?
6.Как осуществить реверс двигателя постоянного тока в системе Г-
Д?
7.Как изменится жёсткость механических характеристик двигателя постоянного тока в системе Г-Д, если в цепь якорей генератора и двигателя ввести добавочное сопротивление?
4.6. Требования к содержанию отчёта
Отчёт по лабораторной работе должен содержать: название лабораторной работы; цель лабораторной работы; чертёж исследуемой схемы; таблицу с результатами измерений; графики электромеханических и механических характеристик двигателя постоянного тока в системе Г-Д; рассчитанные значения жёсткостей и перепадов скорости; вывод по работе.