


11. ЛАБОРАТОРНАЯ РАБОТА № 11. ИССЛЕДОВАНИЕ СИСТЕМЫ ПОДЧИНЁННОГО РЕГУЛИРОВАНИЯ
Цель работы. Приобретение навыков расчёта двухконтурной системы подчинённого регулирования. Приобретение навыков настройки контуров тока и скорости. Исследование статических и динамических свойств системы подчинённого регулирования с различными типами регуляторов.
11.1. Теоретическая часть
При создании систем регулирования в электроприводе широко применяется принцип последовательной коррекции или так называемого подчинённого регулирования.
Структура электропривода с внешним контуром скорости и внутренним контуром тока якоря при неизменном токе возбуждения
изображена на рис. 11.1.
|
|
|
|
kФ |
|
Wр.с(p) |
Wр.т(p) |
kп |
1 |
Ra |
ω |
1+Tп p |
Ra (1+Tэ p) |
kΦTм p |
|
||
|
|
|
|||
|
|
kт |
|
Iс |
|
|
|
|
|
|
|
|
|
kс |
|
|
|
|
|
Рис. 11.15 |
|
|
|
Объект управления состоит из трёх последовательно соединённых
звеньев: |
силового преобразователя |
– Wп (p)= |
kп |
|
; якорной цепи |
||||
1+T p |
|||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
п |
|
|
двигателя |
– Wa (p)= |
|
1 |
; |
механической |
части привода – |
|||
R |
(1+T p) |
||||||||
|
|
a |
э |
|
|
|
|
||
Wм (p)= Ra . kΦTм p
Внутренний контур образован регулятором тока, силовым преобразователем и якорной цепью и замыкается обратной связью по току
скоэффициентом передачи kт.
Вслучае неучёта влияния ЭДС передаточная функция разомкнутого контура тока запишется в виде

Wт(p)=Wр.т(p) |
|
|
kпkт |
|
. |
(11.1) |
R |
(1 |
+ pT )(1 |
+ pT ) |
|||
|
a |
|
э |
п |
|
|
Принимая величину Tп равной некомпенсируемой постоянной времени Tµ, приравнивая последнее выражение к оптимальной передаточной функцией разомкнутого контура, настроенного на технический оптимум (перерегулирования 4,3 %, достижение первого максимума через 4,6Tµ после начала переходного процесса)
Wр (p)= |
1 |
|
2 pTµ (1+ pTµ ), |
(11.2) |
получим передаточную функцию регулятора тока:
Wр.т(p)= |
Ra (1+ pTэ ) |
. |
(11.3) |
||
|
|||||
|
2 pT k |
k |
т |
|
|
|
µ п |
|
|
||
Таким образом, контур тока оптимизируется пропорциональноинтегральным регулятором.
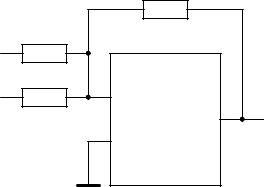
Параметры ПИ-регулятора тока, построенного на операционном усилителе (рис. 11.2), определяются из равенств:
R1 C = |
2Tµ kпkт |
; |
(11.4) |
|
|||
|
Ra |
|
|
Rо.с C =Tэ . |
(11.5) |
||
Rо.с C
R1
R2
–
A
+
Рис. 11.16.
Разомкнутый контур скорости на рис. 11.1 включает в себя регулятор скорости, оптимизированный внутренний контур тока, интегрирующее звено объекта управления, датчик скорости.
Передаточная функция разомкнутого контура скорости записывается в виде
Wс (p)=Wр.с (p) |
|
|
1 |
|
|
Ra kс |
|
|||
|
|
|
|
|
|
|
. |
(11.6) |
||
k |
т |
(1+ 2 pT |
) |
pT |
м |
kΦ |
||||
|
|
µ |
|
|
|
|
|
|
||
Здесь внутренний контур ток аппроксимируется инерционным звеном с постоянной времени 2Tµ.
Принимая некомпенсируемую постоянную времени Tµ′ равной 2Tµ и
аппроксимируя контур согласно выражению (11.2), где Tµ заменяем на 2Tµ, получаем равенство
Wр.с (p) |
Ra kс |
= |
1 |
, |
(11.7) |
kт (1+ pTµ′)pTмkΦ |
2 pTµ′(1+ pTµ′) |
откуда
Wр.с (p)= |
kтTмkΦ |
, |
(11.8) |
|
|||
|
kс 2Tµ′Ra |
|
|
то есть регулятор скорости является пропорциональным (П-регулятор). Схема пропорционального регулятора скорости на базе
операционного усилителя приведена на рис. 11.3.
R4
R3
R5
–
A
+
Рис. 11.17
Параметры элементов схемы определяются из выражения:

R4 |
= |
kтTмkΦ |
|
|
|
|
. |
(11.9) |
|
R3 |
kс 2Tµ′Ra |
|||
Для двукратно интегрирующей системы регулирования скорости, настроенной на симметричный оптимум, выражение (11.6), учитывая, что
Tµ′ = 2Tµ приравнивается к передаточной функции разомкнутого контура, настроенного на симметричный оптимум:
Wр′(p)== |
1+4 pTµ′ |
|
4 pTµ′2 pTµ′(1+ pTµ′), |
(11.10) |
откуда
Wр.с (p)= |
(1 |
+4 pTµ′)kтTмkΦ |
, |
(11.11) |
|
8 p(Tµ′)2 Ra kс |
то есть требуется ПИ-регулятор скорости.
Параметры элементов регулятора на базе операционного усилителя (рис. 11.2) определяются из выражений:
R1 C = |
8(Tµ′)2 Ra kс |
; |
(11.12) |
kтTмkΦ |
|||
Rо.с C = 4Tµ′. |
|
(11.13) |
|
11.3. Подготовка к выполнению работы
Рассчитать параметры регулятора тока при настройке контура тока на технический оптимум. Коэффициент обратной связи по току принять по результатам выполнения лабораторной работы № 10.
Рассчитать параметры регулятора скорости при настройке контура скорости на технический и симметричный оптимумы. Коэффициент обратной связи по скорости принять по результатам выполнения лабораторной работы № 9.

11.4. Выполнение работы
ВНИМАНИЕ! ПЕРЕД ВКЛЮЧЕНИЕМ ПИТАНИЯ СТЕНДА ВСЕ ТУМБЛЕРЫ ДОЛЖНЫ НАХОДИТЬСЯ В ОТКЛЮЧЕННОМ СОСТОЯНИИ (НИЖНЕЕ ПОЛОЖЕНИЕ); ДВИЖОК РЕЗИСТОРА R201 ДОЛЖЕН НАХОДИТЬСЯ ПРИМЕРНО В СРЕДНЕМ ПОЛОЖЕНИИ; ДВИЖКИ ОСТАЛЬНЫХ ПЕРЕМЕННЫХ РЕЗИСТОРОВ ДОЛЖНЫ НАХОДИТЬСЯ В КРАЙНЕМ ЛЕВОМ ПОЛОЖЕНИИ.
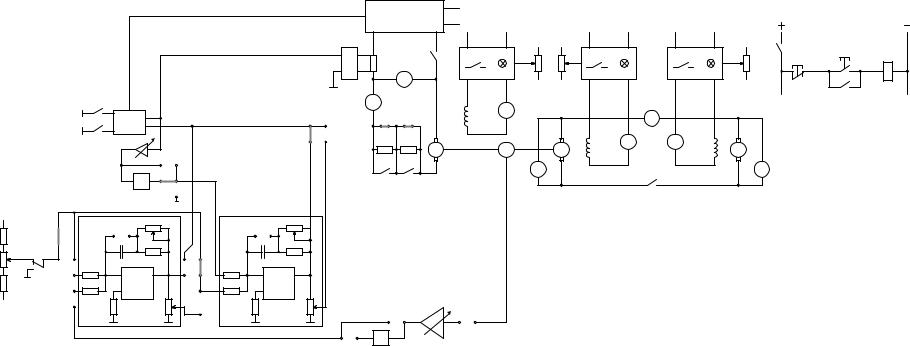
1. Выполнить установку параметров регулятора тока и обратной связи по току. Собрать схему рис. 11.4. Включить автомат питания. Включить SA200. Подключив ко входу A4 тестер, задать резистором R201
R217 R216
напряжение на входе А4, при котором Uвх R217 + R216 ≤10 В.
R215
Подключив тестер к выходу A4, резистором R217 установить расчётное значение напряжения на выходе операционного усилителя. Резистором R201 установить напряжение задания равным нулю. Включить SA100, SA700. Подключить якорь M1 к ШИП (SB704). Плавно вращая R201, установить ток якоря M1 3 А ( PA10). Подключив тестер к выходу операционного усилителя Ki, установить необходимую величину коэффициента обратной связи по току kт. Отключить якорь M1 от ШИП (SB703). Отключить SA200, SA100, SA700. Выключить автомат питания стенда. НАСТРОЙКИ РЕГУЛЯТОРА ТОКА И ОБРАТНОЙ СВЯЗИ
ПО ТОКУ НЕ ТРОГАТЬ!!!
2.Снять осциллограмму переходного процесса оптимизированного контура тока. Собрать схему рис. 11.5. ПРИ ЗАМЫКАНИИ ОБРАТНОЙ СВЯЗИ СЛЕДИТЬ, ЧТОБЫ ЗНАКИ НАПРЯЖЕНИЙ ЗАДАНИЯ И ОБРАТНОЙ СВЯЗИ БЫЛИ ПРОТИВОПОЛОЖНЫ!!! Рассчитать напряжение задания Uз, при котором установившийся ток якоря будет равен 3 А. Включить питание стенда, после загрузки включить SA700,
SA100, SA200. Установить рассчитанное значение Uз (R201). Запустив осциллограф в режиме ждущей развёртки, нажать SB704 и получить осциллограмму изменения тока. Отключить якорь M1 от ШИП (SB703). Выключить SA200, SA100, SA700. Выключить питание стенда.
3.Выполнить установку параметров регулятора скорости при его настройке на технический оптимум и обратной связи по скорости. Собрать схему рис. 11.6. Включить питание стенда, после загрузки включить
SA200. Подключив ко входу A4 тестер, задать резистором R201
|
|
|
R211 R212 |
|
|
|
напряжение на входе А4, при котором |
Uвх |
|
R211+ R212 |
|
≤10 |
В. |
|
R209 |
|
||||
|
|
|
|
|
|
Подключив тестер к выходу A3, резистором R211 установить расчётное значение напряжения на выходе операционного усилителя, соответствующее настройке на технический оптимум. Резистором R201 установить напряжение задания равным нулю. Включить ШИП1 (SA300), установить ток возбуждения M1 400 мА (R300, PA1). Включить SA100, SA700. Подключить якорь M1 к ШИП (SB704). Вращая R201, задать частоту вращения M1 20 –30 с–1 (ИС1). Подключив тестер к выходу операционного усилителя Kω, установить необходимую величину коэффициента обратной связи по скорости kс. Уменьшить частоту вращения M1 до нуля (R201, ИС1). Отключить якорь M1 от ШИП (SB703). Отключить SA200, SA100, SA700. Выключить автомат питания стенда.
НАСТРОЙКИ РЕГУЛЯТОРА СКОРОСТИ И ОБРАТНОЙ СВЯЗИ ПО СКОРОСТИ НЕ ТРОГАТЬ!!!
4. Снять электромеханическую характеристику двухконтурной системы регулирования скорости. Собрать схему рис. 11.7. ОБРАТИТЬ
ВНИМАНИЕ, ЧТО ЗНАК ОБРАТНОЙ СВЯЗИ ПО ТОКУ В ДАННОМ ОПЫТЕ ПРОТИВОПОЛОЖЕН ПО ОТНОШЕНИЮ К ОПЫТУ П. 2!!!
Включить питание стенда, после загрузки включить ШИП1, ШИП2 (SA300, SA301).Установить ток возбуждения M1 равным 400 мА (R300, PA1); ток возбуждения M1 равным нулю (R301, PA2). Включить SA100, SA200, SA700, SA1. Подключить якорь M1 к ШИП (SB704). Установить напряжение на якоре M1 105 В ( R201, PV10). Изменяя ток возбуждения M2 (R301, PA2), снять электромеханическую характеристику M1 (не менее
5 точек). ВНИМАНИЕ!!! При снятии характеристики следить, чтобы
токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения
M2 (PA2) не превышал 400 мА. Результаты измерений занести в таблицу (табл. 11.1). Уменьшить ток возбуждения M2 до нуля (R301, PA2). Установить напряжение на якоре M1 (R201, PV10), соответствующее минимальной частоте вращения диапазона регулирования. Изменяя ток возбуждения M2 (R301, PA2), снять электромеханическую характеристику
M1 (не менее 5 точек). ВНИМАНИЕ!!! При снятии характеристики
следить, чтобы токи якорей M1 и M2 (PA10, PA4) не превышали 3 А, ток возбуждения M2 (PA2) не превышал 400 мА. Результаты измерений занести в таблицу (табл. 11.1). Уменьшить ток возбуждения M2 до нуля
(R301, PA2).
|
|
|
|
|
Таблица 11.1 |
|
Ua1, В |
Ia1, А |
Iв2, мА |
Iа2, А |
ω1, с–1 |
|
M, |
(PV10) |
(PA10) |
(PA2) |
(PA4) |
(ИС1) |
|
Н м |
|
|
|
|
|
|
|

ШИП |
~ U2 |
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
~ U1 |
|
|
~ U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
|
+ |
SA700 |
SB704 |
|
|
|
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
|
|
|
SA301 |
HL301 |
|
|
SA302 |
HL302 |
|
|||
|
|
|
|
|
|
|
|
|
R300 |
|
R301 |
|
|
R302 |
SB703 |
K5 |
||||||||
|
|
|
|
|
|
ДТ |
|
V |
|
ШИП-1 |
|
|
– |
– |
ШИП-2 |
|
|
ШИП-3 |
– |
|
K5.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
|
|
|
|
A |
PA10 |
|
|
|
A |
PA1 |
|
|
|
|
PA4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ОВМ1 |
|
|
|
|
|
A |
|
|
|
|
|
|||
|
SA101 |
CPU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
A |
PA2 |
PA3 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
ОВМ2 |
ОВМ3 |
M3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 |
V |
|
|
|
|
|
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|||||
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+15 В |
|
|
R211 |
|
|
R217 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
C201 |
|
|
C202 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R201 |
SA200 |
A3 |
R212 |
|
A4 |
R218 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R209 |
R215 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
– |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R202 |
R210 |
|
R216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
–15 В |
R214 |
|
R213 |
R219 |
|
R220 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
РС |
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 Kω
Рис. 11.4
ШИП |
~ U2 |
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
~ U1 |
|
|
~ U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
|
+ |
SA700 |
SB704 |
|
|
|
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
|
|
|
SA301 |
HL301 |
|
|
SA302 |
HL302 |
|
|||
|
|
|
|
|
|
|
|
|
R300 |
|
R301 |
|
|
R302 |
SB703 |
K5 |
||||||||
|
|
|
|
|
|
ДТ |
|
V |
|
ШИП-1 |
|
|
– |
– |
ШИП-2 |
|
|
ШИП-3 |
– |
|
K5.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
|
|
|
|
A |
PA10 |
|
|
|
A |
PA1 |
|
|
|
|
PA4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ОВМ1 |
|
|
|
|
|
A |
|
|
|
|
|
|||
|
SA101 |
CPU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
A |
PA2 |
PA3 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
ОВМ2 |
ОВМ3 |
M3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 |
V |
|
|
|
|
|
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|||||
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+15 В |
|
|
R211 |
|
|
R217 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
C201 |
|
|
C202 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R201 |
SA200 |
A3 |
R212 |
|
A4 |
R218 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R209 |
R215 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
– |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R202 |
R210 |
|
R216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
–15 В |
R214 |
|
R213 |
R219 |
|
R220 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
РС |
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 Kω
Рис. 11.5
ШИП |
~ U2 |
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
~ U1 |
|
|
~ U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
|
+ |
SA700 |
SB704 |
|
|
|
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
|
|
|
SA301 |
HL301 |
|
|
SA302 |
HL302 |
|
|||
|
|
|
|
|
|
|
|
|
R300 |
|
R301 |
|
|
R302 |
SB703 |
K5 |
||||||||
|
|
|
|
|
|
ДТ |
|
V |
|
ШИП-1 |
|
|
– |
– |
ШИП-2 |
|
|
ШИП-3 |
– |
|
K5.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
|
|
|
|
A |
PA10 |
|
|
|
A |
PA1 |
|
|
|
|
PA4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ОВМ1 |
|
|
|
|
|
A |
|
|
|
|
|
|||
|
SA101 |
CPU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
A |
PA2 |
PA3 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
ОВМ2 |
ОВМ3 |
M3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 |
V |
|
|
|
|
|
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|||||
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+15 В |
|
|
R211 |
|
|
R217 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
C201 |
|
|
C202 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R201 |
SA200 |
A3 |
R212 |
|
A4 |
R218 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R209 |
R215 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
– |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R202 |
R210 |
|
R216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
–15 В |
R214 |
|
R213 |
R219 |
|
R220 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
РС |
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 Kω
Рис. 11.6

|
|
|
|
|
|
|
ШИП |
|
~ U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
~ U1 |
|
|
~ U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
|
+ |
SA700 |
SB704 |
|
|
|
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
|
|
|
SA301 |
HL301 |
|
|
SA302 |
HL302 |
|
|||
|
|
|
|
|
|
|
|
|
R300 |
|
R301 |
|
|
R302 |
SB703 |
K5 |
||||||||
|
|
|
|
|
|
ДТ |
|
V |
|
ШИП-1 |
|
|
– |
– |
ШИП-2 |
|
|
ШИП-3 |
– |
|
K5.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
|
|
|
|
A |
PA10 |
|
|
|
A |
PA1 |
|
|
|
|
PA4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ОВМ1 |
|
|
|
|
|
A |
|
|
|
|
|
|||
|
SA101 |
CPU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
A |
PA2 |
PA3 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
ОВМ2 |
ОВМ3 |
M3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 |
V |
|
|
|
|
|
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|||||
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+15 В |
|
|
R211 |
|
|
R217 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
C201 |
|
|
C202 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R201 |
SA200 |
A3 |
R212 |
|
A4 |
R218 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R209 |
R215 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
– |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R202 |
R210 |
|
R216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
–15 В |
R214 |
|
R213 |
R219 |
|
R220 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
РС |
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 Kω
Рис. 11.7
5.Снять осциллограмму переходного процесса оптимизированного контура скорости. Установить напряжение на якоре M1 40 В (R201, PV10). Отключить якорь M1 от ШИП (SB703). После полной остановки двигателя запустить осциллограф в режиме ждущей развёртки, нажать SB704 и получить осциллограмму изменения скорости.
6.Уменьшить частоту вращения M1 до нуля (R201). Отключить якорь M1 от ШИП (SB703). Отключить SA700. Уменьшить ток возбуждения M1 до нуля (R300, PA1). Отключить SA200, SA100. Отключить ШИП1 и ШИП2 (SA300, SA301). Выключить автомат питания стенда.
7.Выполнить установку параметров регулятора скорости при его настройке на симметричный оптимум. Собрать схему рис. 11.6, и по методике п. 3 настроить регулятор скорости на симметричный оптимум.
8.Собрать схему рис. 11.8 и, аналогично п.п. 4, 5, снять статические
идинамические характеристики системы при настройке контура скорости на симметричный оптимум.
11.4. Обработка результатов измерений.
1.Рассчитать электромагнитный момент двигателя M1.
2.Построить графики электромеханических и механических характеристик двигателя постоянного тока независимого возбуждения в двухконтурной системе регулирования скорости при настройке контура скорости на технический и модульный оптимумы.
3.Для каждой из полученных характеристик рассчитать значения
жёсткости β, перепада угловой скорости при приложении номинального момента в абсолютных ∆ω и относительных δ единицах.
11.5. Контрольные вопросы
1.От чего зависит характер переходного процесса в замкнутой системе регулирования?
2.Чему равен коэффициент затухания при настройке контура тока на технический оптимум?
3.Чему равно время переходного процесса и перерегулирование при настройке контура тока на технический оптимум?
4.Чему равна статическая ошибка в двукратно интегрирующей
системе?
5.Каким образом в рассматриваемой системе обеспечить отсечку
по току?

|
|
|
|
|
|
|
ШИП |
|
~ U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ U1 |
|
|
|
|
~ U1 |
|
|
~ U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
+ |
|
|
|
|
|
|
+ |
SA700 |
SB704 |
|
|
|
|
|
|
|
|
|
K5.1 |
SA300 |
HL300 |
|
|
|
SA301 |
HL301 |
|
|
SA302 |
HL302 |
|
|||
|
|
|
|
|
|
|
|
|
R300 |
|
R301 |
|
|
R302 |
SB703 |
K5 |
||||||||
|
|
|
|
|
|
ДТ |
|
V |
|
ШИП-1 |
|
|
– |
– |
ШИП-2 |
|
|
ШИП-3 |
– |
|
K5.1 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
PV10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA100 |
|
|
|
|
A |
PA10 |
|
|
|
A |
PA1 |
|
|
|
|
PA4 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
ОВМ1 |
|
|
|
|
|
A |
|
|
|
|
|
|||
|
SA101 |
CPU |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
R911 |
R912 |
M1 |
|
|
|
|
|
|
|
A |
PA2 |
PA3 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
ОВМ2 |
ОВМ3 |
M3 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
BR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
Ki |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K10.1 |
K8.1 |
|
|
|
|
PV1 |
V |
|
|
|
|
|
|
|
PV2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|||||
|
|
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+15 В |
|
|
R211 |
|
|
R217 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R200 |
|
C201 |
|
|
C202 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R201 |
SA200 |
A3 |
R212 |
|
A4 |
R218 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R209 |
R215 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
– |
|
– |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R202 |
R210 |
|
R216 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
+ |
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
–15 В |
R214 |
|
R213 |
R219 |
|
R220 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
РС |
|
|
РТ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–1 Kω
Рис. 11.8
6.Влияет ли ограничение напряжения регуляторов на характер переходных процессов? Когда и каким образом?
7.Какие достоинства и недостатки имеют системы подчинённого регулирования?