

t
y(t) h( ) u(t) (t )u( )d ,
где h(t), (t) – переходная и весовая функции динамической системы. Для дискретной системы при T0 1 справедливо
k
y(k) u(i) (k i) ,
i
где (i) – весовая функция импульсной системы.
Для моделирования дискретной возмущающей среды z(k) можно вос-
пользоваться разностным уравнением (3.18), но на вход дискретного динамического звена подать дискретный белый шум с наперед заданными параметрами.
Тогда случайный сигнал можно представить авторегрессионым процессом со скользящим средним
z(k) c z(k ) ... cp z(k p) (3.19)n(k) d n(k p) ... d p n(k p).
Здесь n(k) – последовательность нормально распределенных статиче-
ски независимых случайных величин (дискретный белый шум) с математиче-
ским ожиданием
M n(k)
и ковариационной функцией
|
|
cov n(k), ( ) , |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
||
где |
– дисперсия; ( ) – функция Кронекера |
|
|
|
|
|
|
||||||||||
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
( ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
при 0. |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишем дискретную передаточную функцию фильтра возмущения в |
|||||||||||||||||
соответствии с уравнением (3.19) в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Gz (z) |
z(z) |
|
C z 1 |
|
1 c1z 1 |
... cp z p |
. |
(3.20) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
n(z) |
D z 1 |
1 d z |
1 |
... d |
p |
z p |
||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||
3.4.Преобразование и исследование динамических моделей
Для перехода от передаточной функции (3.13) к модели пространства состояний используем соответствующее ей дифференциальное уравнение (3.17). Поделим левую и правую часть уравнения (3.17) на коэффициент an при старшей степени производной и получим
112
|
|
|
|
|
|
yn t |
a' |
yn 1 |
t ... a' |
y t a |
' y t |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
2 |
1 |
(3.21) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
u m t b' |
u m 1 t |
|
|
t b' u t , |
||||||||||
|
|
|
|
|
|
b' |
... b' u |
||||||||||||||||
|
|
|
|
|
|
|
|
m |
|
|
|
m 1 |
|
1 |
|
0 |
|
||||||
где a' |
|
an |
,...,a' |
|
a |
|
, a' |
|
|
|
,b' |
|
bm |
,b' |
|
bm |
,...,b' |
|
b |
. |
|||
|
|
|
|
|
|
|
|
||||||||||||||||
n |
|
an |
|
|
|
an |
|
|
|
an |
m |
|
|
m |
|
|
an |
|
|
an |
|||
|
|
|
|
|
|
|
|
|
|
|
an |
|
|
|
|
||||||||
При |
нулевых |
начальных |
условиях |
|
y( ) y' ( ) ... yn ( ) и |
||||||||||||||||||
u( ) u' ( ) |
... um ( ) уравнению (3.21) соответствует система уравне- |
||||||||||||||||||||||
ний состояния вида (2-я каноническая форма)
|
|
|
|
an' |
||
|
|
|
||||
x |
|
|
|
a' |
||
|
|
|
|
|
n |
|
|
|
|
||||
|
||||||
|
|
|
|
' |
||
|
|
|
||||
|
|
|
|
a |
||
|
|
|
|
|||
xn |
|
' |
||||
|
|
|||||
|
|
|
|
a |
||
и уравнение наблюдения
|
|
|
|
x |
|
|
|
b' |
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
b' |
||
|
|
|
|
|
|
|
|
|
m-1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||||
|
|
x |
|
|
|
|
' |
||
|
|
|
|
b |
|||||
|
|
|
|
|
n-1 |
|
|
|
1 |
|
|
|
xn |
|
|
|
b0' |
||
|
|
|
|
|
|
|
|
|
|
u, |
(3.22) |
|
|
|
|
|
|
|
x |
|
|||
|
|
|
|
|
|
y ... |
x |
, |
|||
|
|
|
|||
|
|
||||
|
|
|
|
||
|
|
|
|||
|
|
|
|
|
|
|
xn |
|
|||
где коэффициенты матрицы состояния и вектора связи со входом однозначно определены коэффициентами дифференциального уравнения (3.21).
Связь переменных состояния системы (3.22) с исходными переменными дифференциального уравнения (3.21) определена системой уравнений
x y; |
|
|
|
|
|
||
x |
y |
' a' |
y b' u; |
|
|
|
|
|
|
n |
m |
|
|
|
|
x |
y |
'' a' |
y' b' |
u' a' |
y b' u; |
(3.23) |
|
|
|
n |
m |
n |
|
m |
|
|
|
||||||
x |
y n a' y n ... a' |
y b'u. |
|
||||
n |
|
|
n |
|
|
|
|
Уравнения (3.23) используют для определения начальных условий переменных состояния, то есть нахождении вектора начальных условий x .
Отметим, что недостающие коэффициенты в векторе связи со входом b при n m дополняют нулями, начиная с верхних элементов столбца b .
Пример 3.1. Следящая система описывается дифференциальным уравнением второго порядка
. y" y' y . u' u .
113
Перейти к модели пространства состояния. На входе действует единичное ступенчатое воздействие u t t . Начальные условия до приложе-
ния единичной ступенчатой функции равны y y' .
Приведем данное дифференциальное уравнение к уравнению вида (3.21). Для этого поделим левую и правую его часть на коэффициент при старшей производной левой части
y" y' y u' u .
Согласно (3.22) запишем уравнения состояния и наблюдения следящей системы
x
x
|
x |
|
|
|
u; |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x |
|
|
|
||
|
y |
x |
|
|
|
. |
|||
|
|
|
|
|
|
|
|
x |
|
Начальные условия системы согласно (3.23) |
||||
x y ; |
||||
x |
|
y' y u . |
||
|
|
|
|
|
В случае равенства степеней производной левой и правой частей дифференциального уравнения (3.21) n m уравнения состояния принимают вид (2-я каноническая форма)
|
|
|
|
an' |
|
|
|
|
|
||
x |
an' |
|
|||
|
|
|
|||
x |
|
|
|
||
|
|
||||
|
|
|
|
|
|
|
|
' |
|||
|
|
|
a |
||
|
|
|
|
a' |
|
xn |
|
||||
а уравнение наблюдения
|
|
|
|
|
x |
|
|
|
bm' an' bm' |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
bm' an' bm' |
|
|
|
|||||
|
|
|
|
|
x |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
u , (3.24) |
||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
xn |
|
|
bm' |
a' |
b' |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
bm' |
a' |
b' |
|
|
|
|||
|
|
|
xn |
|
|
|
|
|
||||||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
b' |
|
|
|
|
|
|
|
|
|
|
|||
y |
|
|
u . |
|
|
|
|
|
|
|
(3.25) |
|||||||
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Связь переменных состояния с исходными переменными дифференциального уравнения (3.21) выражается из уравнений (3.25) и (3.24) и определена системой уравнений
114
x |
y b' |
u; |
|
|
|
|
||
|
|
m |
|
|
|
|
|
|
x |
y |
' b |
' u' a' |
y b' |
u; |
|
||
|
|
m |
n |
m |
(3.26) |
|||
|
||||||||
|
||||||||
x |
y |
n b' |
u n a' |
y n ... a' |
y b'u. |
|||
n |
|
|
m |
|
n |
|
|
|
Коэффициенты матрицы состояния и вектора связи со входом однозначно определены коэффициентами уравнения (3.21). Уравнение (3.26) используют для расчета начальных условий переменных состояния.
В матричной форме уравнения (3.24) и (3.25) имеют вид
x Ax bu;
(3.27)
y cT x du,
где A, b – матрица состояния и вектор связи со входом определяются как и в уравнении (3.24); y – выходная переменная (выход системы); cT c c ...cn
– вектор-строка связи с выходом; d – коэффициент безынерционной связи входа с выходом и согласно (3.25) d bm' .
Системе уравнений (3.27) соответствует структурная схема, представленная на рис. 3.10.
|
|
|
|
|
d |
|
|
|
|
x(0) |
|
|
|
|
|
|
|
|
|
|
u t |
|
x |
t |
x |
|
y |
B |
|
сT |
||||
|
|
( )d |
|
|
||
|
|
|
0 |
|
|
|
|
|
+ |
|
|
|
|
|
|
|
A |
|
|
|
Рис. 3.10. Структурная схема модели пространства состояний (3.27)
Переход к моделям пространства состояний по структурной схеме системы. Как видно из (3.23) и (3.26) переменные состояния 2-ой канонической формы есть линейная комбинация входных и выходных переменных и их производных. Это затрудняет физическую интерпретацию переменных состояния и реализацию соответствующих регуляторов и обратных связей. Непосредственный переход от структурных схем к моделям пространства состояний устраняет данный недостаток и осуществляется в следующем порядке:
115

1)проводим нумерацию динамических звеньев структурной схемы в порядке i , , ...;
2)обозначаем входные воздействия пронумерованных динамических звенье через ui ;
3)обозначаем выходы динамических звеньев через xi с учетом порядка звена и номером последнего обозначения выхода xi (индекс переменных
состояния должен последовательно увеличиваться от звена к звену); 4) записываем уравнения состояния каждого динамического звена, ру-
ководствуясь табл. 3.1 или правилами перехода от передаточной функции к модели пространства состояний;
5) составляем уравнения для связи входов ui с выходом ему предше-
ствующего i звена непосредственно по структурной схеме;
6) составляем уравнения преобразования нелинейных звеньев. Последовательность перехода рассмотрим на простой модели (рис.
3.11).
1 2
r p |
|
|
u |
|
K |
x |
u |
|
K |
x |
|
y p |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T p |
|
T p |
|
|||||||||
|
|
|
(-) |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.11. Структурная схема линейной системы
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.1 |
|
|
Уравнения состояния для типовых динамических звеньев |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Передаточная функция |
Уравнение состояния |
|||||||||||||||
|
|
|
K |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
xi Kui |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
p |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
Ku |
|
x |
|
||||
|
|
|
|
|
xi |
|
||||||||||
|
|
|
|
|
|
|
|
|
i |
|||||||
|
Tp |
|
|
|
|
T |
i |
|
||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
Kui Txi |
xi |
|||||
|
|
|
K |
|
xi |
|
|
|
||||||||
|
|
|
T |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
T p Tp |
|
|
|
|
|
|
|
|||||||||
xi |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
xi |
|
|
|
|
|
|
|||
116
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T T |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
xi |
|
|
K |
K |
|
|
T x |
x |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
K T p |
|
T |
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
i |
i |
|
i |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T p T p |
|
x |
|
|
KT u |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
xi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
T |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
K T p |
|
|
|
|
T |
K |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
zi |
T |
ui zi |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
T p |
|
|
|
|
|
KT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
u |
|
|
|
z |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
i |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kui zi |
|
|
|
|||||||||||
|
|
|
|
KTp |
|
|
|
|
|
|
|
zi |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|||||||||||||||||||
|
|
|
Tp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
xi Kui zi |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
K Tp |
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
zi |
|
ui |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
Tp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
xi |
Kui |
|
zi |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Всоответствии с п.1 последовательности пронумеруем динамические звенья (обозначения над звеньями 1 и 2).
Далее обозначим входы и выходы пронумерованных динамических звеньев соответственно u и u и выходы x и x .
Всоответствии с табл. 3.1 имеем
|
|
|
K |
|
u x ; |
||
x |
|
|
|||||
|
|
|
|||||
|
T |
|
|
||||
|
|
|
|
||||
|
|
|
K u x . |
||||
x |
|
||||||
|
|
||||||
|
T |
|
|
|
|||
Уравнение связи входов и выходов пронумерованных динамических
звеньев
u r t x ;
u x .
Подставляя уравнения связи в уравнение состояния, получим
x |
K r t x x ; |
||||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
T |
|
|
|||||||
|
K x x . |
|
|||||||
x |
|
|
|||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
||||
|
|
|
|
|
|
|
|||
Уравнение наблюдения согласно структурной схемы y x .
117
В матричной форме уравнения состояния и наблюдения имеют вид (сравни с 3.9)
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
K |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
x |
|
|
|
T |
|
|
|
|
x |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
T |
|
|
|
|
T |
|
r(t); |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|||
x |
|
|
T |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|||||||
y |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x
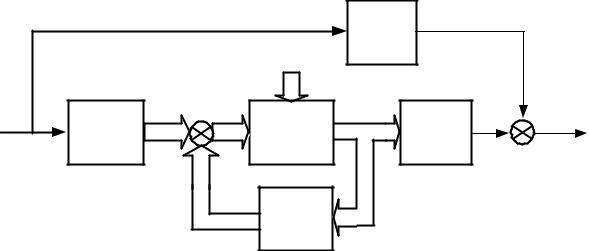
Рассмотрим последовательность перехода для замкнутой нелинейной системы, структурная схема которой приведена на рис. 3.12а.
Поскольку в цепь возмущения p включено звено, порядок числите-
ля которого больше порядка знаменателя, сделаем перенос сумматора через звено и перейдем к структурной схеме, приведенной на рис. 3.12б. Рассмотренная ситуация вряд ли возможна на практике и приведена для иллюстрации вариантов перехода к типовым звеньям.
На структурной схеме (рис. 3.12б) пронумеруем динамические звенья, кроме безынерционных усилителей и сумматоров, входы и выходы звеньев. При обозначении колебательного звена с номером 3 индекс предыдущей выходной переменной x увеличивается на 2, поскольку это звено второго по-
рядка. Следует отметить, что можно не соблюдать последовательность индексации пропускать часть индексов. Но при окончательном формировании уравнений состояния придется проводить переиндексацию переменных, что может привести к ошибкам.
В соответствии с табл. 3.1 составляем уравнения состояния системы управления
|
|
1 |
K K |
|
u x , |
|
|
|||||||
x1 |
|
|
|
|||||||||||
|
|
4 |
|
|
||||||||||
|
|
T1 |
1 |
|
|
1 |
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1 |
K u |
|
|
x |
|
, |
|
|
|||
x2 |
|
|
|
|
|
|
||||||||
|
|
2 |
2 |
|
|
|||||||||
|
|
|
T3 |
3 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
K |
|
|
|
2 T x x |
, |
|||||
x3 |
|
u |
|
|||||||||||
|
|
|
||||||||||||
|
|
T 2 |
2 |
|
3 |
|
|
2 |
3 |
4 |
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
118

x4
z5
x5
x6
x7
x3 ,
1 K6u4 z5 , T6
K6u4 z5 ,
|
1 |
|
|
|
|
|
K K T |
|
|
t 2 T2 x6 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 T2 |
|
x7 , |
|||
|
|
K2 K7 |
2 |
|
7 |
4 |
||||||||||
|
|
|
|
|
||||||||||||
|
T 2 |
|
|
|
|
|
T 2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
x |
|
|
K2 K7T4 |
|
t . |
|
|
|
|
|
|
|||||
6 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
T 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Уравнения связи входов и выходов динамических звеньев u K r t x x x ,
u F x , u x ,
u x .
Подставляя их в уравнения состояния, получаем
x |
K K K r t x x K x z x , |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
K F x |
x , |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
K x T x x , |
|
|
|
|
|
|
|||||||||||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
T |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x x , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
z |
|
|
K x z , |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K K T |
|
|
|
|
|
|
|
|||||||
x |
|
|
|
|
|
|
|
|
|
K |
|
T |
t |
T x x , |
||||||||||||||||
|
T |
|
|
|
|
K |
|
|
|
T |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
K K T |
t . |
|
|
|
|
|
|
|
|
|
||||||||||
x x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
119
p
K T p
r p |
|
|
|
K |
|
|
|
K |
F |
K |
|
|
y p |
K |
|
|
K |
|||
T p |
T p |
|
T p T p |
|||
|
|
|
|
|
||
|
|
|
|
|
||
|
K T p |
|
|
|
|
|
|
T p |
|
|
|
|
|
а) |
5 |
|
p |
|
|
|
|
|
|
|
|
K K T p |
|
|
x |
|||
|
|
|
|||||
|
|
T p T |
|
p |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
3 |
y p |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
r p |
|
u |
K |
K |
|
x |
|
F |
u |
|
K |
|
x |
|
u |
|
x |
|
|
|
|
|
|
|
|
|
|
K |
|
||||||||
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
T p |
|
|
|
|
T p |
|
|
|
|
|
T p T p |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
x |
K T p |
u |
T p
б)
Рис. 3.12. Структурная схема нелинейной системы а) исходной б) преобразованной
Уравнение выхода согласно структурной схемы y x x .
Нелинейное звено F x должно иметь математическое описание, либо
типовую схему (ограничение, отсечка, люфт и т.п.).
Переход от непрерывных моделей к дискретным.
Рассмотрим переход от непрерывной модели к дискретной различными методами на примере апериодического звена первого порядка.
120
Звено описывается передаточной функцией W p |
K |
|
K ' |
||||||||||
|
|
|
и со- |
||||||||||
Tp |
p a |
||||||||||||
ответствующим дифференциальным уравнением первого порядка |
|
|
|
||||||||||
|
|
|
|
|
|
Tdy t |
y(t) Ku(t), |
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
dt |
|
|
|
|
|||
где a |
|
, |
K ' |
K |
. |
|
|
|
|
||||
|
|
|
|
|
|
||||||||
T |
|
T |
|
|
|
|
|||||||
Для |
непрерывной системы с экстраполятором нулевого |
порядка на |
|||||||||||
входе, передаточная функция непрерывной части системы будет иметь вид
|
p W p W p e |
pT |
|
K |
' |
|
|
|
W |
|
|
, |
|
||||
|
|
|
|
|||||
пн |
ф |
p |
|
p a |
|
|
||
|
|
|
|
|
||||
где Wф p – передаточная функция экстраполятора нулевого порядка, |
T – |
|||||||
интервал квантования.
Для получения дискретной передаточной функции воспользуемся таблицей z-преобразования [21]
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T p |
|
|
|
|
|
|
|
z Z |
W p |
|
|
|
||||||||
W z Z W p W p Z |
e |
|
|
|
W p |
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
ф |
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
W |
p |
|
z |
|
|
K |
' |
|
|
|
|
z |
|
|
z e |
aT |
|
|
|
K |
' |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
Z |
|
|
|
|
|
|
|
|
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aT |
|
|
|
|||||||||||||||
|
|
z |
|
p |
|
|
z |
|
p p a |
|
z |
|
|
|
|
z z e |
a |
|
|
|||||||||||||||||
|
e aT |
K |
' |
|
a K |
|
|
|
b z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
z e |
aT |
a |
|
z a |
a z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
T |
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где a e T , b K a |
z e pT . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В соответствии с (3.16) и (3.18) разностное уравнение будет иметь вид y(k) a y(k ) b u(k ) , или
y(k) b u(k ) a y(k ).
Преобразование Тастина. Преобразование Тастина позволяет рассчитать W (z) без таблиц z-преобразования и основано на приближенном
cоотношении
p |
|
|
z |
. |
|
|
|||
|
T |
|
z |
|
|
|
|
|
|
Подставив это выражение в передаточную функцию звена и проведя преобразования получим
W z |
|
|
|
K |
|
|
b |
b z |
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
z |
|
a z |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
T T |
z |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
121 |
|
|
|
|
|
|
|
где b |
|
|
|
KT |
, b |
|
KT |
|
|
, |
a |
T T |
. |
|
|
|||||||||||
|
T T |
|
|
|
|
|
T T |
|
|
|||||||||||||||||
|
|
|
|
|
|
T T |
|
|
|
|
|
|
||||||||||||||
|
Соответственно разностное уравнение имеет вид |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
y(k) a y(k ) b u(k) b u(k ) , или |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
y(k) b u(k) b u(k ) a y(k ) . |
|||||||||||||||
|
Левые разности. Производная аппроксимируется выражением |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy(t) |
|
y(k) y(k ) |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
T |
||
|
После подстановки в дифференциальное уравнение и преобразования |
|||||||||||||||||||||||||
получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(k) b u(k) a y(k ) , |
||||||||||||
где b |
|
|
K |
, a |
a |
|
|
, a |
T |
. |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
a |
|
a |
|
T |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Правые разности. Производная аппроксимируется выражением |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy(t) |
|
y(k ) y(k) |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
T |
||
|
В правых разностях разностное уравнение апериодического звена име- |
|||||||||||||||||||||||||
ет вид |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
y(k ) |
|
K |
u(k) ( a) y(k) , |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
||
где a |
|
T |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Выбор интервала |
квантования T зависит от динамики объекта, от |
||||||||||||||||||||||||
спектра возмущающих сигналов, от типа измерительных приборов и от ряда других противоречивых факторов. Некоторые рекомендации даны в [21, разд.5.5].
Для задач моделирования и идентификации непрерывного объекта ре-
комендуется такт квантования выбирать из соотношения |
|
T0 1/ 6 1/15 tnn , |
(3.28) |
где tnn – время переходного процесса объекта (системы) управления.
Так, для апериодического звена первого порядка, не охваченного об- |
||||
ратной связью, время переходного процесса tnn T , следовательно |
||||
|
|
|
|
|
T |
|
|
|
T . . T . |
|
||||
|
|
|
||
Если апериодическое звено охвачено единичной отрицательной обратной связью, то передаточная функция системы имеет вид
Wз ( p) |
K з |
|
, |
|
Tз p |
||||
|
|
|||
122 |
|
|
|
|
где Kз |
K |
, Tз |
T |
. |
|
|
|
||||
K |
K |
||||
|
|
|
Следовательно, для замкнутой системы
|
|
1 |
|
1 |
|
|
3T |
|
||
T0 |
|
|
|
|
|
|
|
|
. |
|
6 |
15 |
1 K |
||||||||
|
|
|
|
|
|
|||||
Анализ динамических моделей с использованием пакета Control System Toolbox. Пакет предназначен для работы с линейными динамическими, стационарными, непрерывными и дискретными моделями ОУ (Time-Invariant или LTI-модели). Эти модели могут быть как одномерными (SISO – один вход/ один выход), так и многомерными (MIMO – много входов/ много выходов) и задаются в виде:
передаточной функции, tf-модель
W (s) |
s2 3s 2 |
; |
s3 4s2 12s 4 |
нулей-полюсов и коэффициента усиления, zpk-модель
W (s) |
(s )(s ) |
; |
|
||
(s )(s )(s ) |
пространства состояний, ss-модель
x Ax Bu, y Cx Du.
Здесь в передаточных функциях используется оператор s . |
|||
Команды создания LTI-моделей. Строка |
|||
|
|
|
W tf , |
создает tf-модель W(s) s/ s2 |
2s 10 . При этом MATLAB выводит в ко- |
||
мандное окно сообщение |
|
||
Transfer Function: |
|
||
s |
|
|
|
-------------------- |
|
||
s^ s |
|
|
|
МИМО-модели |
|
||
B 1 |
1 ; 1 |
1 |
% полином числителя |
A 1 |
2 ; 1 |
4 5 |
% полином знаменател я |
W tf B, A .
MATLAB отвечает сообщением
Trnasfer function from input to output… s-1
#1: ----------
123
|
s+2 |
|
|
s+1 |
|
#2: |
------------------ . |
|
|
s^2+4s+5 |
|
Задавая zpk-модель в виде |
2 , 2 |
|
|
W zpk 0, 1 |
|
получим сообщение
Zero/pole/gain:
-2s
------------------ . (s-1)(s-2)
Для создания ss-моделей используют команду sys ss A, B, C, D
что создает модель с именем sys, содержащую матрицы A, B, C, D, которые должны иметь совместимые размерности строк и столбцов.
Для моделей с нулевой матрицей D используют выражение D 0 . Так для ss-модели
sys ss |
; |
|
|
, ; |
, , |
|
имеем |
|
|
|
|
|
|
|
|
|
|
|||
A |
|
|
, B ,C , D . |
|||
|
|
|
|
|
||
|
|
|
|
|||
Дискретные модели. Для их создания используют те же команды tf, zpk, ss с добавлением в их синтаксис периода квантования T , в секундах
sys tf num, den,T0 sys zpk z, p, k,T0
sys ss A, B,C, D,T0 .
Например, строка команды
Wz tf 1 1 , . , .
задает дискретную модель W (z) (z ) /(z . ) с T0=0.1 сек
Transfer function: z+1
-------- . z-0.5
Sampling time: 0.1.
Дискретная tf функция в DSP формате.
При цифровой обработке сигналов (DSP – Digital Signal Processing) передаточную функцию обычно записывают в виде рационального выражения
124
с использованием z , а числитель и знаменатель содержат коэффициенты
полиномов в порядке возрастания степеней z . Например, числитель и знаменатель выражения
H z |
. z |
|
|
||
z z |
|
||||
нужно указать как вектора-строки |
, а это противоречит |
||||
. и |
|
|
|||
обычному правилу уменьшения степеней z . |
Чтобы избежать этого, Control |
||||
System Toolbox имеет специальную функцию filt для задания DSP формата. Для дискретных передаточных функций вида (3.16) используется команда
Wz filt num,den,T .
Так, строка
Wz . ,
дает ответ
Transfer function: 1 + 0.5 z^–1
-------------------------
1 + 2 z^–1 + 3 z^–2.
Переход от передаточной функции к модели пространства сосотояния и наоборот, осуществляется теми же командами tf, zpk и ss
W tf(sys) W zpk(sys) sys ss W
%преобразование модели sys в tf - модель;
%преобразование модели sys в zpk - модель;
%преобразование модели W в ss - модель.
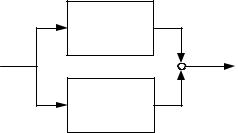
Операции над моделями. Операция сложения соединяет системы параллельно. Так, строка
sys sys1 sys2
возвращает LTI-модель sys с параллельным соединением sys1 и sys2 (рис.
3.13)
sys1
u |
|
y |
|
sys2
Рис. 3.13. Сложение LTI-моделей
Операция умножения соединяет системы последовательно. Так, sys sys1 sys2
125

возвращает LTI-модель sys с последовательным соединением sys1 и sys2 (рис. 3.14)
u |
|
|
v |
|
y |
||
|
sys2 |
|
|
sys1 |
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис.3.14. Умножение LTI-моделей
Обратите внимание на обратный порядок следования sys1 и sys2 на структурной схеме (рис. 3.14). Это обусловлено порядком вычислений.
Конкатенация моделей осуществляется матрично-подобным видом:
sys sys1,sys2 |
% горизонтальная конкатенац ия; |
sys sys1;sys2 |
% вертикальн ая конкатенац ия. |
В терминах ввода/ вывода эти две операции имеют следующие блочные интерпретации (рис. 3.15)
u |
|
y |
||
H |
H |
|||
|
|
|||
|
|
+ y |
u |
|
|
|
+ |
y |
|
u |
|
|
||
|
H |
H |
||
|
|
|||
Рис. 3.15. Горизонтальная и вертикальная конкатенация LTI-моделей
Запаздывание в непрерывных системах поддерживается MATLAB в пределах совместимости отдельных моделей. Так, для tf-моделей запаздывание (time delay) задается введением в команду строки 'inputdelay' и его значе-
ния. Например, строка |
. ,'inputdelay ', . |
|
||||
W tf . , |
|
|||||
приводит к ответу |
|
|
|
|
|
|
Transfer function: |
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
exp(-0.05*s) * --------------------------- |
|
|
||||
|
s^2 + 14 s + 40.02 |
|
|
|
||
Строка |
|
, |
, |
|
,'inputdelay ', |
. |
H tf , |
|
|||||
|
|
|
126 |
|
|
|
приводит к ответу
Transfer function from input 1 to output: 1
-----
s+2
Transfer function from input 2 to output: s
exp(-0.2*s) * ----------------------
s^2 + 2 s + 5
Для ss-моделей запаздывание задается аналогично: |
||
sys ss , |
, ; , ,'inputdelay ', . |
. % ss-модель, два входа, два |
выхода и два значения T .
Переход от непрерывных к дискретным моделям и обратно в пакете
Control System Toolbox. Функция с2d производит дискретизацию непрерывной модели, а функция d2c , наоборот, преобразует дискретную модель в непрерывную. Эти команды поддерживают несколько видов квантования/ восстановления: с экстраполяром нулевого порядка (zoh - Zero-Order Hold), с экстраполяром первого порядка (foh - First-Order Hold), аппроксимацию Тастина без и с предварительной модификацией частот, с согласованием полюсов и нулей. Синтаксис этих команд (с zoh по умолчанию) таков:
sysd c2d sysc,T |
% переход от непрерывной модели sysc к дискретной |
||
sysd, T - период квантования; |
|||
|
|||
sysc d2c sysd |
% переход от дискретной модели sysd к непрерыв- |
||
ной sysc. |
|
||
|
|
||
Для задания других методов преобразования следует указать их допол- |
|||
нительно: |
|
|
|
sysd c2d sysc,T ,'foh' |
% использует foh метод; |
||
sysc d2c sysd,'tustin' |
% использует аппроксимацию Тастина. |
||
Переход от дискретной модели к непрерывной имеет ограничения:
-d2c с zoh преобразованием не может оперировать с моделями, имеющим полюса z ;
-действительные отрицательные полюса в z-области отображаются в два комплексных полюса в s-области, что ведет к увеличению порядка непрерывной системы.
Функция с2d может также квантовать непрерывные системы с запаздыванием, однако при этом используют только методы zoh и foh. Так, для дискретизации системы с передаточной функцией
W s e . s |
|
, |
|
s s
если набрать
127
W tf , |
|
,'inputdelay ', . |
Wz c2d W, |
|
. . |
MATLAB ответит |
|
|
Transfer function: |
|
|
0.01187 z^2 + 0.06408 z + 0.009721 z^(-2) * ----------------------------------------------
z^3 - 1.655 z^2 + 0.7408 z
Sampling time: 0.1
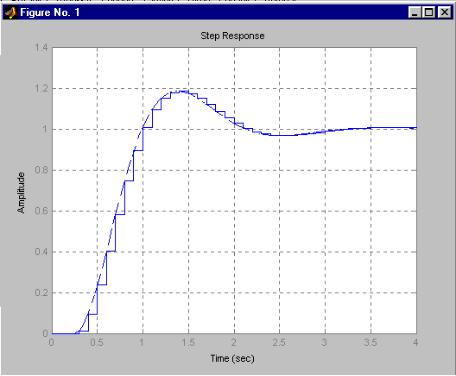
Для сравнения отклика непрерывной и дискретной моделей используем
команду
step W,' ', Wz,' ' .
MATLAB построит график, показанный на рис.3.16.
Рис. 3.16. Переходные процессы систем с запаздыванием
Изменение интервала дискретизации. Дискретную LTI систему sys1
можно подвергнуть квантованию с другой частотой, используя команду
sys2 d2d sys ,T .
Новый интервал квантования T может не отличаться в целое число раз
от прежнего значения.
Для снятия точных значений точек графика достаточно щелкнуть левой кнопкой мышки на интересующей точке и MATLAB выведет название сис-
128
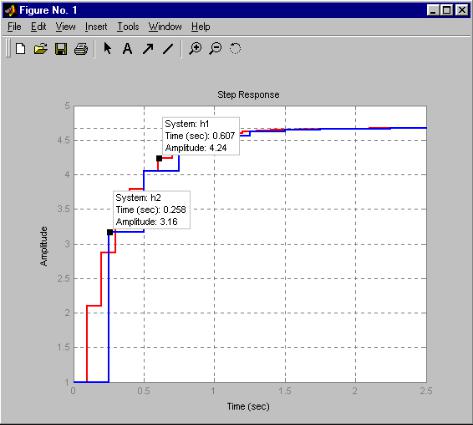
темы, значения по осям ординат и абсцисс (в данном случае – значения времени и амплитуды сигнала отклика системы (рис.3.17)).
Для создания дополнительных текстовых поясняющих надписей на графиках, редактирования толщины и стиля линий, шрифтов можно использовать специальный редактор, который вызывается выбором опции Edit Plot в
меню Tools (Инструменты), опций Arrow, Line, Text, Title, Legend и других в меню Insert (Вставка).
Для ускорения доступа к этим опциям на панели графика имеются кнопки Edit Plot, Insert Arrow, Insert Line, Insert Text. В режиме Edit Plot необ-
ходимо щелкнуть левой кнопкой мыши по нужному элементу и он становится доступным для редактирования. Поэкспериментируйте с этими средствами самостоятельно на графике.
Рис. 3.17. Получение точных данных по графикам
Обратная связь. Для создания отрицательной обратной связи двух моделей sys1 и sys2 используют команду sys feedback sys1,sys2, или экви-
валентную sys feedback sys1,sys2 .
Для создания положительной обратной связи этих моделей используют команду sys feedback sys1,sys2, 1 .
129
Для ss-моделей опцией feedin указывают какие входы модели sys2 подключены к входам модели sys1, опцией feedout - какие выходы модели sys подключены к входам sys1. Создадим систему, показанную на рис. 3.18.
момент + |
W |
скорость |
- |
|
|
|
|
H
Рис. 3.18. Система с обратной связью
Для этого соединим объект управления
|
|
|
|
s s |
|
|
|
|
W (s) s s |
с контроллером в обратной связи |
||||
|
|
|
|
H (s) (s ) , |
|
|
|
|
s |
используя команды |
|
|
|
|
W tf |
|
, |
|
,'inputname','момент','outputname','скорость' ; |
|
|
|
|
H zpk , , ; |
|
|
|
|
Ws feedback W, H |
MATLAB ответит
Zero/pole/gain from input "момент" to output "скорость": 0.18182 (s+0.2192) (s+2.281) (s+10)
------------------------------------------------
(s+3.419) (s^2 + 1.763s + 1.064).
В результате получаем zpk модель Ws в соответствии с правилами предпочтения ss zp tf .
Анализ модeлей. Пакет Control Toolbox имеет команды для определения нулей и полюсов системы, усиления в области низких частот (на постоянном токе) и т.д. (табл. 3.2).
130
|
Таблица 3.2 |
|
|
Команды для исследования динамики систем |
|
|
|
|
covar |
ковариация отклика на белый шум |
|
damp |
собственная частота и коэффициент демпфирования |
|
dcgain |
усиление на низкой частоте (постоянном токе) |
|
dsort |
ранжирование полюсов и нулей дискретной системы в поряд- |
|
|
ке убывания их модулей |
|
esort |
ранжирование полюсов и нулей непрерывной системы в по- |
|
|
рядке убывания их действительных частей |
|
norm |
нормы LTI моделей (H2 и L ) |
|
pole, eig |
полюса системы |
|
pzmap |
карта полюсов/нулей |
|
tzero |
нули системы |
|
Пример использования этих команд для анализа системы h = tf([4 8.4 30.8 60],[1 4.12 17.4 30.8 60])
Transfer function:
4 s^3 + 8.4 s^2 + 30.8 s + 60
---------------------------------------
s^4 + 4.12 s^3 + 17.4 s^2 + 30.8 s + 60 pole(h)
ans = |
|
-1.7971 + 2.2137i |
|
-1.7971 - 2.2137i |
|
-0.2629 + 2.7039i |
|
-0.2629 - 2.7039i |
|
tzero(h) |
|
ans = |
|
-0.0500 + 2.7382i |
|
-0.0500 - 2.7382i |
|
-2.0000 |
|
dcgain(h) |
|
ans = |
|
1 |
|
[ninf,fpeak] = norm(h,inf) |
% peak gain of freq. response |
ninf = |
|
1.3402 |
% peak gain |
fpeak = |
|
1.8537 |
% frequency where gain peaks |
|
131 |
Для анализа ss-моделей используют команды из табл. 3.3.
Таблица 3.3
|
Команды для анализа SS моделей |
|
|
canon |
каноническая SS реализация |
ctrb |
матрица управляемости |
ctrbf |
матрица управляемости в лестничной форме |
gram |
граммианы управляемости и наблюдаемости |
obsv |
матрица наблюдаемости |
obsvf |
матрица наблюдаемости в лестничной форме |
ss2ss |
линейное преобразование переменных состояния |
ssbal |
масштабирование с помощью диагональной матрицы |
Расчет переходных процессов. Для этого используются команды, описанные в табл. 3.4.
Таблица 3.4
|
Команды для получения временного отклика систем |
|
|
|
|
step |
|
реакция на ступенчатое воздействие |
impulse |
|
реакция на импульсное воздействие |
gensig |
|
генерация входных сигналов |
lsim |
|
реакция на произвольное заданное воздействие |
initial |
|
реакция на ненулевые начальные условия |
Функции step, impulse, initial автоматически выбирают пределы по оси абсцисс для построения переходных процессов. Их синтаксис таков:
step(sys)
impulse(sys)
initial(sys,x0) % x0 – вектор начальных значений переменных состоя-
ния.
Для MIMO систем эти команды строят несколько графиков, по одному на каждый канал входа/ выхода.
Так, строка:
h = [tf(10,[1 2 10]) , tf(1,[1 1])]; step(h)
строит два графика, показанные на рис. 3.19.
132
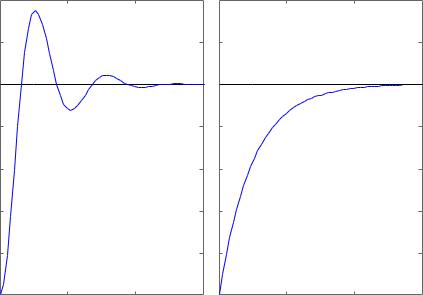
Step Response
From: In(1)
|
1.4 |
|
|
|
|
|
|
1.2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
Amplitude |
0.8 |
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
0.4 |
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
0 |
0 |
2 |
4 |
6 |
0 |
|
|
|
|
|
Time (sec) |
|
From: In(2)
2 |
4 |
6 |
Рис. 3.19. Переходные процессы MIMO системы
Автоматический режим выбора пределов времени на графиках можно отменить, задав конечное значение времени:
step(sys,10) % моделирование от 0 до 10 с
или вектор равномерно распределенных значений времени отсчета:
t = 0:0.01:10 |
% отсчет осуществляется каждые 0.01 секунд |
step(sys,t) |
|
Функция lsim строит отклик системы для более широкого класса входных воздействий. Так, команда
t = 0:0.01:10; u = sin(t); lsim(sys,u,t)
рассчитывает отклик LTI-модели sys на синусоидальное воздействие в течение 10 секунд.
Анализ в частотной области. Он позволяет исследовать поведение LTI-модели в частотной области и определить полосу пропускания, резонансную частоту, коэффициент усиления на постоянном токе, АЧХ и ФЧХ, устойчивость замкнутой системы. Для этого используют команды, описанные в табл.3.5.
133
|
Таблица 3.5 |
|
Команды для получения частотного отклика систем |
|
|
bode |
диаграмма Боде - ЛАЧХ и ЛФЧХ |
nyquist |
частотный годограф Найквиста - АФХ |
nichols |
частотный годограф Никольса - АФХ в угловых координатах |
ngrid |
линии сетки для диаграммы Никольса |
evalfr |
частотная характеристика на заданной частоте |
freqresp |
частотная характеристика в заданном диапазоне частот |
margin |
запас устойчивости по фазе и модулю |
sigma |
частотные характеристики сингулярных значений ПФ |
В этих командах диапазон частот выбирается автоматически в зависимости от расположения нулей и полюсов системы. Для задания частотной области точно в интервале {wmin, wmax} используют такой синтаксис команд
bode(sys,{wmin, wmax})
рисует диаграмму Боде в диапазоне частот от 0.1 до 100 рад/с. Можно также задать вектор интересующих частот. Например,
w = logspace(-1, 2, 100)
bode(sys, w) .
Команда logspace задает вектор w логарифмически распределенных частот, начиная с 10-1 = 0,1 рад/с и заканчивая 102 =100 рад/с, всего 100 точек.
Построение графиков откликов нескольких систем. Для того, чтобы построить отклики нескольких систем на одном графике, набирают необходимую функцию с входным перечнем исследуемых моделей sys1, ..., sysN:
step(sys1,sys2,...,sysN) impulse(sys1,sys2,...,sysN)
...........
bode(sys1,sys2,...,sysN)
nichols(sys1,sys2,...,sysN)
Все модели должны иметь одинаковое число входов и выходов. Для облегчения восприятия графиков можно задать цвет/ стиль линии/ маркер (color/ linestyle/ marker) для каждой модели также, как и в предыдущих командах - перечислением. Так, команда bode sys1,'r',sys2,' y ',sys3,'gx' строит
график для sys1 непрерывными красными (r - red) линиями, для sys2 - желтыми (y - yellow) пунктирными линиями, для sys3 - зелеными (g - green) ли-
ниями с х маркерами. Можно также задавать и другие цвета, маркеры, толщину линий и т.п.
134
Изменение графиков. Данные откликов системы в частотной или вре- |
|||||||||
менной областях можно сохранить в массивах MATLAB командами с лево- |
|||||||||
сторонним синтаксисом: |
|
|
|
|
|
|
|
|
|
[y,t] = step(sys) |
|
% значение, время |
|
|
|
|
|
|
|
[mag,phase,w] = bode(sys) |
% амплитуда, фаза, частота |
|
|
|
|
||||
[re,im,w] = nyquist(sys) |
|
% реальная, мнимая часть, частота. |
|
||||||
Сохраненные данные можно использовать для построения графиков в |
|||||||||
удобном для пользователя виде. Так, следующий набор команд строит диа- |
|||||||||
грамму Боде, переходную характеристику и карту расположения полю- |
|||||||||
сов/нулей в одном графическом окне: |
|
|
|
|
|
|
|
||
h = tf([4 8.4 30.8 60],[1 4.12 17.4 |
|
|
|
|
|
|
|
||
30.8 60]) |
|
|
Bode Magnitude (dB) |
|
|
Step Response |
|
||
|
10 |
|
|
1.5 |
|
|
|
|
|
[mag,phase,w] = bode(h) |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
[y,t] = step(h,15) |
|
|
|
|
|
|
|
|
|
|
-10 |
|
|
|
|
|
|
|
|
[p,z] = pzmap(h) |
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
-20 |
|
|
|
|
|
|
|
% Bode Plot |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
subplot(221) |
|
-30 -2 |
0 |
2 |
00 |
5 |
10 |
15 |
20 |
semilogx(w,20*log10(mag(:))), |
10 |
10 |
10 |
|
|
|
|
|
|
|
Bode Phase (deg) |
|
|
Pole-Zero Map |
|
||||
|
|
|
|
|
|
||||
grid on |
|
50 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
title('Bode Magnitude (dB)') |
|
0 |
|
|
2 |
|
|
|
|
subplot(223) |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
semilogx(w,phase(:)), grid on |
|
-50 |
|
|
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
title('Bode Phase (deg)') |
|
-100 -2 |
|
|
-4 |
|
|
|
|
% Step response |
|
0 |
2 |
-1.5 |
-1 |
-0.5 |
0 |
||
|
10 |
10 |
10 |
-2 |
|||||
|
|
|
|
|
|
||||
subplot(222) |
|
|
|
|
|
|
|
|
|
plot(t,y) |
|
|
|
|
|
|
|
|
|
title('Step Response') |
|
|
|
|
|
|
|
|
|
% Pole/zero map |
|
Рисунок 3.20. Характеристики системы |
|||||||
subplot(224) |
|
|
|
|
|
|
|
|
|
plot(z,'go'), hold, plot(p,'bx') |
|
|
|
|
|
|
|
|
|
title('Pole-Zero Map') |
|
|
|
|
|
|
|
|
|
Можно заменить в представленном перечне команд в строках, начинающихся со слова title (наименование), англоязычные термины их русскими эквивалентами - Амплитуда, Фаза, Переходная характеристика, Карта полюсов /нулей.
Пример 3.2. Рассмотрим непрерывный объект, структурная схема которого представлена на рис. 3.11, для передаточных функций
W ( p) |
|
|
|
, W ( p) |
|
. |
||
|
|
|
|
|
||||
p |
|
p |
||||||
|
|
|
||||||
Передаточная функция разомкнутой системы
135

W ( p) .
p p
Используя z-преобразование для системы с экстрополятором нулевого порядка, перейдем к дискретной передаточной функции
|
b z b z |
||||
W (z) |
|
|
|
|
, |
a z a |
|
z |
|||
|
|
|
|
|
|
где численные значения коэффициентов зависят от такта квантования T .
Воспользуемся результатами z-преобразования [21, табл.3.7.2], для
T с
W (z) |
. z . z |
|
|
. |
|
. z . z |
||
Коэффициент усиления разомкнутой системы
K |
|
|
. . |
. . |
z |
|
|||
|
|
. . |
. |
|
|
|
|
Преобразование Тастина дает другой результат
WT (z) . . z . z ,. z . z
а коэффициент усиления
Kz . ..
Соответственно для T c
W (z) |
. z . z |
|
||
|
, |
|
||
. z , z |
|
|||
W (z) |
. . z . z |
. |
||
|
. z . z |
|||
|
|
|
||
Замкнутой системе (см. рис. 3.11) соответствует передаточная функция
Wз ( p) |
|
|
|
, |
||
|
|
|
||||
p p |
p p |
|||||
|
|
|
||||
с коэффициентом усиления Kз / .
Проведем исследование свойств рассмотренной непрерывной и дискретной модели объекта управления в системе MATLAB с помощью пакета расширения Control System Toolbox (рис. 3.21).
Для контрольной печати введенных передаточных функций и результатов преобразований (вычислений) необходимо удалить завершающий символ командной строки точку с запятой (поэкспериментируйте).
Проанализируем некоторые полученные результаты преобразований. Примечание: скопировать рис. 3.21 в Matlab, выполнить графики.
136

%Пример 3.2
W1=tf(1,[10 1]);% ПФ звена 1 W2=tf(1,[5 1]);% ПФ звена 2
W=W2*W1; % ПФ разомкнутой системы WS=feedback(W,1); % ПФ замкнутой системы
SSR=ss(W);% уравнения состояния разомкнутой системы
ZPR=zpk(W);% zpk-модель
SSK=canon(SSR);% каноническая (диагональная) форма уравнений состояния tzero(W);% нули
pole(W);% полюса
dcgain(W);% коэффициент усиления, приведенный
[mag,phase,w]=bode(W,{0.01,100}); % формирование массива для построения
%ЛАЧХ и ФЧХ
[p,z]=pzmap(W); % формирование массива для построения карты полюсов/нулей
Wz=filt([0 0.00906 0.00819],[1 -1.72357 0.74082]);% ПФ дискретной системы
%по таблице z-преобразований,Т0=1
Wz1=c2d(W,1); % переход от W к WZ, Т0=1 WzT=c2d(W,1,'tustin');% переход от W к WZ по Тастину, Т0=1
SSD=c2d(SSR,1);% переход к дискретной ss-модели, Т0=1 Wz4=c2d(W,4);% переход к дискретной ПФ, Т0=4 WT=d2c(Wz1);% переход от дискретной ПФ к непрерывной
WT1=d2c(WzT);% переход от дискретной ПФ по Тастину (Т0=1) к непрерывной WT4=d2c(Wz4);% переход от дискретной ПФ (Т0=4) к непрерывной %Построение ЛАЧХ и ФЧХ
subplot(221)
semilogx(w,20*log(mag(:))), grid on
title('Амплитуда L(dB)') subplot(223) semilogx(w,phase(:)),grid on title('Фаза(град)')
%Переходной процесс для передаточных функций subplot(222)
step(W,WS,Wz,Wz1,Wz4,100),grid on %расчет п/п title('Переходной процесс для ПФ') %Переходной процесс для уравнений состояния subplot(224)
step(W,SSR,SSK,SSD,100),grid on
title('п.п для уравнений состояния T0=1c')
Рис. 3.21. Программа преобразования и исследования динамической модели
Так, переход от передаточной функции разомкнутой системы к уравнениям состояния дает следующий результат
x .
.x
. x |
|
|
. |
||
|
|
|
|
u ; |
|
|
|
|
|
|
|
x |
|
|
|||
y |
x |
|
|
|
. |
||
. |
|
||
|
|
|
|
|
x |
|
|
Соответственно zpk-модель имеет вид
.
W ( p) s . s . .
137