

Каноническая (диагональная) форма уравнений состояния
|
|
. |
|
x |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
x |
|
|
. |
|
|
|
|
|
u ; |
|
|
|
|
|
|
|
. x |
|
. |
|||
|
|
|
y . |
|
|
x |
|
|
|
|
|||
|
|
|
. |
. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
Полученные передаточные функции с помощью команды c2d (см. рис. |
|||||||||||||
3.21) совпадают с приведенными в [21, табл. 3.7.2]. |
|
|
|
|
|||||||||
Дискретная модель уравнений состояния для T c имеет вид |
|||||||||||||
x (k 1) |
|
|
0.7326 |
0.1378 |
x (k) |
|
0.4305 |
|
|||||
1 |
|
|
|
|
|
|
1 |
|
|
|
u(k) ; |
||
|
|
|
0.1076 |
0.9909 |
|
|
|
0.0283 |
|
||||
x2 (k 1) |
|
|
x2 |
(k) |
|
|
|||||||
|
|
|
y (k) |
|
|
x (k) |
|
|
|
|
|||
|
|
|
. |
. |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x (k) |
|
|
|
|
||
Обратный переход от дискретной передаточной функции к непрерыв- |
|||||||||||||
ной для T c и T c дает |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
W ( p) |
|
|
. |
|
, |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
p . p . |
|
|
|
|
||||
что совпадает с искомой W ( p) . |
|
|
|
|
|
|
|
|
|
|
|||
Переход от передаточной функции, полученной по Тастину, дает |
|||||||||||||
W ( p) |
. p . p . |
. |
|||||||||||
T |
|
|
p . p . |
|
|
||||||||
|
|
|
|
|
|||||||||
В числителе появился полином, но переходной не будет отличаться от искомой W ( p) (проверьте).
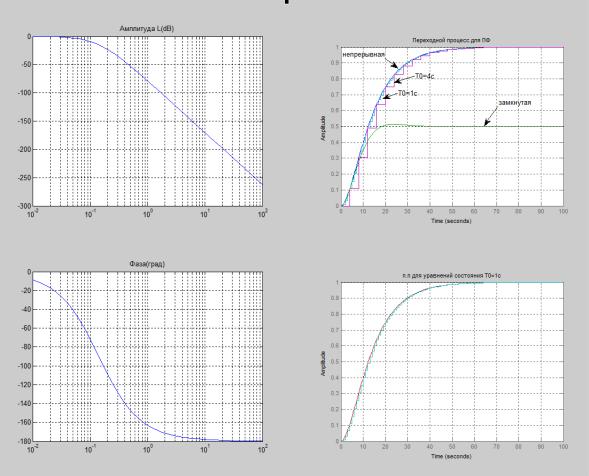
ЛАЧХ и ФЧХ приведены на рис. 3.22.
Переходной процесс для непрерывной разомкнутой и замкнутой системы и дискретной моделей приведены на рис. 3.22. В замкнутой системе время переходного процесса и коэффициент усиления уменьшаются, очевидно также влияние T на переходной процесс.
3.5. Статические модели
Во многих практических задачах управления и проектирования зависимость между выходными и входными переменными (3.1) статическая.
Следовательно, нас не интересует за счет каких входных воздействий объект управления (проектирования) перешел в состояние х(t) , а интересуют
только количественные соотношения выходных переменных y от состояния объекта управления (проектирования).
138
|
Статическую зависимость будем представлять в виде |
||
|
|
y Q(x) V , |
(3.29) |
где y |
– рассчитываемый или наблюдаемый (измеряемый) выходной показа- |
||
тель, |
скаляр; Q(x) – |
наперед заданная статическая зависимость (функция) |
|
входных переменных; |
x x1, x2 ,...,xn |
– вектор входных переменных раз- |
|
мерности n 1; v – аддитивная помеха, как результат воздействия всех неучтенных возмущений в модели (3.1).
Рис. 3.22. Исследование динамической модели
Вектор входных переменных x отражает и входные воздействия ui , zi и состояния xi . Так исходную модель
F(u,z) a0 a1u1 a2 z1 a3u12 ,
легко привести к виду
Q(x) a0 x0 a1x1 a2 x2 a3 x12 ,
где x – фиктивная переменная, x u , x z . Изложенный переход иллюстрирует рис. 3.23.
139
z |
|
|
|
|
ОУ |
|
|
ОУ |
|
|
v |
|
v |
|
|
|
|
|
|
u |
|
y |
x |
y |
F (u, z) |
|
Q(x) |
|
|
|
|
|
||
а) |
|
|
б) |
|
Рис. 3.23. Структурная схема статической модели ОУ: а) исходная; б) приведенная |
|
|||
Рассмотрим некоторые часто применяемые модели. Модель или полином первого порядка
n |
|
|
|
Q(x) aT x ai xi a0 x0 a1x1 a2 x2 |
... an xn . |
(3.30) |
|
i 0 |
|
|
|
Эта модель линейна относительно переменных |
xi , линейна относи- |
||
тельно параметров (коэффициентов) |
ai и в n-мерном пространстве представ- |
||
ляет гиперплоскость (рис. 3.24). |
|
|
|
Q(x) |
x2 |
|
|
gradQ(x)
x1 |
x1 |
|
x2
Рис. 3.24. Линейная модель и ее линии равного уровня
Модель второго порядка или полный квадратичный полином
n |
n n |
|
Q(x) aT x X T Ax ai xi aij xi x j , |
(3.31) |
|
i 0 |
j 1 i 1 |
|
140

|
|
a |
a |
... |
a |
|
|
|
|
|
|
|
|
|
n |
|
|
где |
A |
|
|
a |
... |
a n |
– квадратичная матрица коэффициентов |
|
|
|
|
... |
... |
|
|||
|
|
|
|
размерности n n . |
||||
|
|
... ... |
|
|||||
|
|
|
|
|
... |
|
|
|
|
|
|
ann |
|
||||
Так для n и n матрица А имеет вид
a |
a |
|
|
a |
a |
a |
||||
A |
|
|
a |
|
a |
|
||||
A |
|
; |
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
||
|
a |
|
|
|
|
a |
|
|||
|
|
|
|
|
|
|
|
|
|
|
Соответственно модели |
|
|
|
|
|
|
|
|
|
|
Q(x) a x |
a x |
a |
2 |
x |
2 |
a |
x2 |
a |
x x |
2 |
a |
22 |
x2 |
, |
(3.32) |
||
0 |
0 |
1 |
1 |
|
|
11 |
1 |
12 |
1 |
|
2 |
|
|
||||
|
|
Q(x) a |
0 |
x |
0 |
a x a |
2 |
x |
2 |
a x a x2 |
a x x |
2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
3 |
3 |
|
11 |
1 |
12 |
1 |
(3.33) |
|||||||
|
|
a |
|
x2 a x x a |
|
|
x |
|
|
x a x2 . |
|
|
|
|
|||||||||||||
|
|
22 |
23 |
2 |
|
|
|
|
|
||||||||||||||||||
|
|
|
2 |
|
|
13 |
1 |
3 |
|
|
|
|
3 |
33 |
3 |
|
|
|
|
|
|
||||||
Здесь x x |
j |
– взаимодействие переменных, |
|
x |
– квадратичные члены |
||||||||||||||||||||||
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ii |
|
|
|
|
|
|
полинома (модели), xi |
– линейные члены модели, |
a x |
– свободный коэффи- |
||||||||||||||||||||||||
циент модели. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модель (3.31) нелинейна относительно переменных xi , но линейна от- |
|||||||||||||||||||||||||||
носительно параметров ai , aij , aii . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Если матрица A положительно определена, кроме начала координат |
|||||||||||||||||||||||||||
x 0 , т.е. все диагональные определители матрицы A строго положительны
D a ; |
D |
a |
a |
;... |
||||
|
|
a |
||||||
|
|
|
|
|
|
|
||
|
a |
a |
... |
a k |
|
|
|
|
D |
|
a |
... |
a k |
; |
D , |
||
k |
... ... ... ... |
|
|
n |
||||
|
|
|
|
|||||
... akk
то квадратичная форма имеет минимум.
Если матрица A отрицательно определена повсюду, кроме начала координат, т.е. выполняются следующие условия
D ; |
D |
; D |
;...( )n D , |
|
|
|
n |
то квадратичная форма имеет максимум. |
|
||
Положительно и отрицательно определенные квадратичные формы в |
|||
пространстве переменных |
xi |
имеют |
поверхности равного уровня |
q x , x ,...,xn const в виде концентрических эллипсоидов с центром в начале координат. Линейные члены aT x модели (3.31) не изменяют формы по-
141
верхностей равного уровня, а лишь смещают их в пространстве переменных, не меняя при этом ориентации главных осей эллипсоидов.
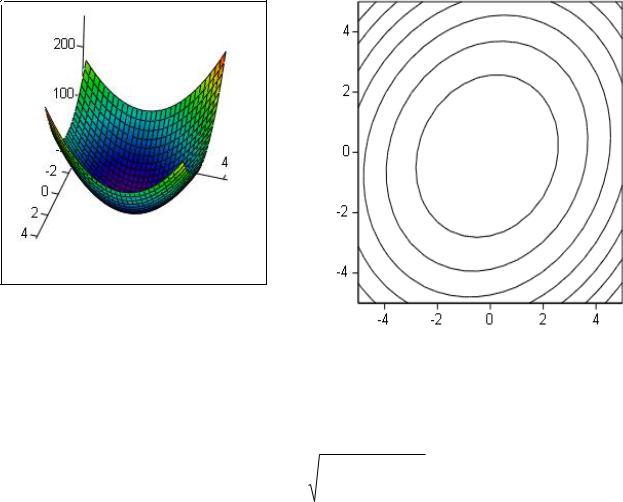
Пример квадратичной модели приведен на рис. 3.25.
S
Q
Рис. 3.25. Квадратичная модель и ее линии равного уровня
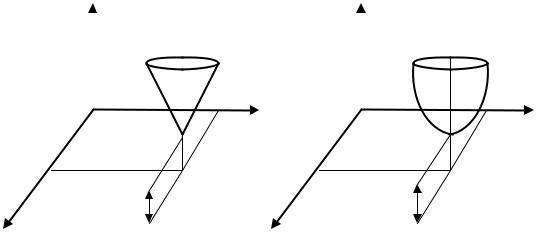
Некоторые часто используемые в задачах оптимизации квадратичные модели.
Центральная модель с постоянным градиентом (рис. 3.26, а)
|
|
n |
|
|
Q(x) Q* |
a1 xi xi* 2 |
(3.34) |
|
|
i 1 |
|
и центральная модель с переменным градиентом (рис. 3.26, б) |
|||
|
|
n |
|
|
Q(x) Q* a1 xi xi* 2 , |
(3.35) |
|
|
|
i 1 |
|
где x* |
– координаты экстремума по i -ой переменной, Q* |
– экстремальное |
|
i |
|
|
|
значение функции.
142
|
|
Q(x) |
|
|
Q(x) |
|
|
|
|
x* |
|
|
x* |
|
|
|
1 |
|
|
1 |
|
|
|
|
x1 |
|
x1 |
x2* |
|
|
|
|
|
|
|
|
x* |
x2* |
|
x* |
|
|
|
Q |
* |
|
|
Q* |
x |
|
|
|
x2 |
||
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
а) |
|
|
б) |
Рис. 3.26. Центральные модели второго порядка: а) с постоянным градиентом (конус); б) с переменным градиентом (параболоид вращения)
Эллиптическая модель
Q(x) Q* n a x x* 2 .
i i i
i 1
Сепарабельная модель
Q(x) Q* n f x x* ,
i i i
i 1
где fi ( ) – некоторые наперед заданные функции.
(3.36)
(3.37)
Нестационарность статической модели отражается изменением коэф-
фициентов модели, например |
|
Q(x,t) aT (t)x . |
(3.38) |
В задачах оптимизации рассматривают частные случаи нестационарности модели, а именно: вертикальный и горизонтальный дрейф экстремальной точки (цели) либо их сочетание. Так, уравнение
|
n |
it 2 |
|
|
Q(x,t) a0t ai xi |
(3.39) |
|
|
i 1 |
|
|
задает вертикальный дрейф экстремального значения функции Q* со скоро- |
|||
стью a |
и горизонтальный дрейф координат экстремума со скоростью i |
||
(рис. 3.27). |
|
|
|
143
 Q ( x )
Q ( x )
Q*(t2 )
|
|
x* (t ) |
x* (t |
2 |
) |
|
|
|
1 |
1 |
1 |
|
|
|
|
x2* (t1 ) Q*(t ) |
|
|
|
|
|
* |
1 |
|
|
|
x |
x |
(t2 ) |
|
|
|
||
2 |
|
|
|
1 |
||
|
|
|
|
|
|
|
 x
x
2
Рис. 3.27. Пример дрейфа
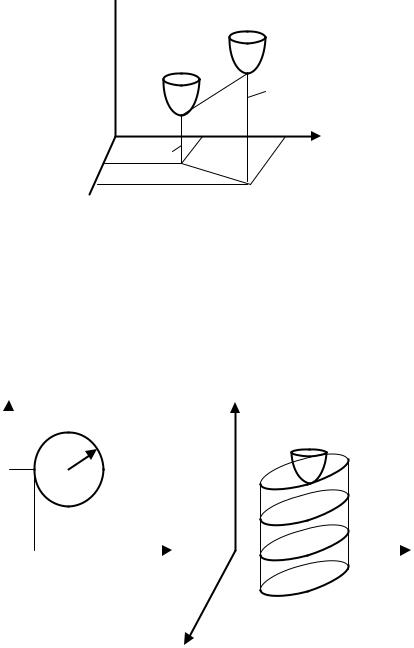
Модель вида |
|
x* Rsin t 2 |
x |
|
x* Rcos t 2 |
|
|||||
Q(x,t) a t x |
2 |
(3.40) |
|||||||||
0 |
1 |
1 |
|
|
|
2 |
|
|
|||
задает восхождение параболоида вращения по цилиндру (рис. 3.28). |
|
||||||||||
x2* (t ) |
|
x2 |
R |
|
|
|
Q(x,t) |
|
|||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1* (t ) |
x1 |
x1 |
x2
Рис. 3.28. Пример нестационарной модели второго порядка
Модели нелинейные относительно и переменных xi , и параметров ai , имеют вид
Q(x) |
|
a0 x0 a1x1 |
|
, |
|
(3.41) |
|||||
a |
2 |
x |
2 |
a |
x x |
2 |
|
||||
|
|
|
12 |
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Q(x) a0 x0 |
|
|
a1x1 |
|
(3.42) |
||||||
|
|
||||||||||
exp |
|
|
. |
||||||||
|
|
|
|
|
|
a2 x2 |
|
|
|||
144
Для испытания эффективности алгоритмов оптимизации применяют тестовые функции, имеющие сложные поверхности с характерными острыми
и затяжными «оврагами» и «гребнями». Среди них выделяют. |
|
|
Овраг Розенброка |
|
|
Q(x) 100 x2 x12 |
2 1 x1 2 , |
(3.43) |
с координатами минимума Х * ( ; ) . |
|
|
Функция Пауэлла |
|
|
Q(x) x1 10x2 2 5 x3 x4 2 x2 2x3 4 10 x1 x4 4 , |
(3.44) |
|
с координатами минимума Х * ( ; ; ; ). |
|
|
Двумерная экспоненциальная функция |
|
|
1 |
2 |
|
Q(x) exp ax1 exp ax2 |
exp a exp 10a |
, (3.45) |
a 0
где a a . – шаг изменения параметра. Координаты экстремума Х * ( ; ) .
Временные ряды. Для целей прогнозирования наблюдаемых процессов и явлений во времени (прогноз температуры, давления, скорости движения, уровня шума, выпуска продукции, спроса и т.п.) применяют модели:
полином нулевого порядка
x(t) a , |
|
|
|
(3.46) |
||
полином первого порядка |
|
|
|
|
|
|
x(t) a a t , |
|
|
|
(3.47) |
||
полином второго порядка |
|
|
|
|
|
|
x(t) a |
|
a t |
a |
t , |
(3.48) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полином n -ой степени как обобщение полиномиальных моделей |
|
|||||
n |
|
|
|
|
|
|
x(t) aiti , |
|
|
|
(3.49) |
||
i |
|
|
|
|
|
|
гармоническую модель для описания периодических процессов |
|
|||||
x(t) xm sin( t ). |
(3.50) |
|||||
В экономических задачах часто используют экспоненциальную (показательную) модель
x(t) a tb с , |
|
(3.51) |
|
и логистическую кривую |
|
|
|
x(t) |
a |
, |
(3.52) |
bexp( at) |
|||
где a , a, b – параметры (коэффициенты) модели.
Если измерения ведутся в дискретные моменты времени, то подстанов-
145