

4.5. Идентификация параметров динамических моделей
Первые реализованные в системах управления методы идентификации динамических объектов типа «вход-выход» были основаны на использовании частотных, ступенчатых и импульсных воздействий. Эти методы требуют специально спланированных входных сигналов, а именно ступенчатых сигналов для идентификации по переходной функции, импульсных входных сигналов для идентификации по весовой функции и синусоидальных входных сигналов с различными частотами для определения частотной характеристики. Большинство этих методов применимы для линейных процессов и частично для линеаризованных и основаны на преобразовании Фурье.
Другой подход идентификации линейных процессов (динамических объектов) использует методы корреляционных функций. При этом на вход объекта подается белый шум с относительно малой амплитудой, накладываемый на рабочий входной сигнал. Некоторые соотношения, связывающие характеристики динамической системы с корреляционными функциями, приведены в разделе 1.8., а практические аспекты их вычисления в разделе
2.9.
Спектральные соотношения входных и выходных сигналов также можно использовать для идентификации параметров частотных функций динамических процессов. Взаимосвязь спектральных плотностей случайных процессов на входе и выходе динамического объекта с его частотной характеристикой приведена в разделе 1.8., а практические аспекты вычисления в разде-
ле 2.10.
Подробно с перечисленными подходами можно ознакомиться в [18, 19,
20].
В настоящее время для идентификации динамических процессов широкое применение нашли методы регрессионного анализа (метод наименьших квадратов), методы стохастической аппроксимации и последовательного обучения, метод квазилинеаризации, градиентный метод с прогнозом, эвристические методы идентификации [19].
Рассмотрим методы идентификации динамических объектов, основанные на регрессионных процедурах с использованием метода наименьших квадратов.
Алгоритмы этих методов ничем не отличаются от алгоритмов идентификации статических объектов, рассмотренных в разделе 4.2. и 4.3.
При изложении материала использована методология [21].
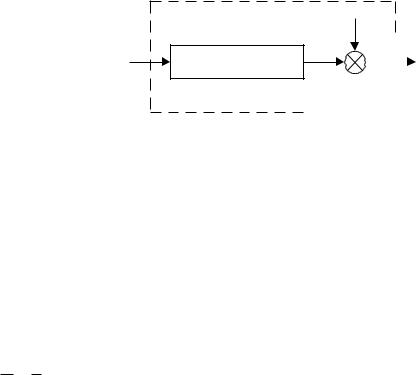
Рассмотрим одномерный дискретный динамический объект (рис. 4.4). Переход от непрерывных моделей к дискретным представлен в разделе 3.4.
196
т.д.
Допустим, что измерения выполнены на интервале k 1,2,...,n d N . Результаты эксперимента представим согласно (4.78) в векторно-матричной форме
|
Y (n d N) ψ(n d N)θ(n d N 1) V (n d N), |
|
(4.80) |
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n d ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n d 1) |
|
|
|
|
||
|
Y (n d N ) |
|
|
; |
|
|
|
(4.81) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n d N ) |
|
|
|
|
|||
|
|
|
y(n d 1) |
|
y(n d 2) |
y(d ) |
|
|
||
|
|
|
y(n d ) |
|
y(n d 1) |
y(d 1) |
|
|
||
(n d N ) |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(n d N 2) |
y(N d ) |
|
|||
|
|
y(n d N 1) |
|
|||||||
|
u(m 1) |
|
u(m 2) |
|
u(0) |
|
|
|
|
|
|
|
|
u(m 1) |
|
|
|
|
|
|
|
u(m) |
|
u(1) |
|
|
|
|
(4.82) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
u(m N 1) |
|
u(m N 2) |
|
|
|
|
|
|
|
|
|
y(N ) |
|
|
|
|
|||||
Для получения оценок неизвестных параметров воспользуемся мето- |
||||||||||
дом наименьших квадратов. |
|
|
|
|
|
|
|
|||
Тогда из (4.80) непосредственно имеем |
|
|
|
|
|
|||||
|
θ(n d N 1) C(n d N)ψT (n d N)Y (n d N), |
|
(4.83) |
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
, |
(4.84) |
|
|
|
C(n d N ) ψT (n d N )ψ(n d N ) |
|||||||
при условии, что N 2n .
Выражение (4.83) может быть реализовано после того, как сформирован массив, содержащий все измерения вариаций входных и выходных сигналов.
Процедура (4.83) аналогична процедуре (4.16) для статических моде-
лей.
Рекуррентный метод наименьших квадратов (РМНК). |
|
Результаты эксперимента (4.83) можно обработать также РМНК |
|
θ(k) θ(k ) (k) y(k) T (k) θ(k ) , |
k , ,... (4.85) |
где вектор коррекции
198
(k) |
C(k ) (k) |
|
|
|
, |
(4.86) |
|
T (k)C(k ) (k) |
|||
а ковариационная матрица оценок параметров |
|
||
C(k) C(k ) (k) T (k)C(k ) . |
(4.87) |
||
В уравнении (4.85) выражение в квадратной скобке равно невязке меж- |
|||
ду измеренным на объекте значением выходной переменной y(k) |
и предска- |
||
занной по модели с оценками, полученными на предыдущем такте вычислений
|
|
= − ( ) , |
(4.88) |
где |
|
|
|
|
|
(k) T (k) θ(k ) . |
(4.89) |
Исходными данными для алгоритма служат |
|
||
|
|
θ(0) 0;C(0) αI n m (n m) |
(4.90) |
причем число α должно быть достаточно велико. |
|
||
Полученные оценки (4.85) будут несмещенными θ( ) |
= θ при ко- |
||
нечном |
N и состоятельны в среднем квадратичном lim→∞ θ( ) = θ, |
||
lim→∞ |
|
θ − θ θ( − θ) = 0, если выполняются следующие усло- |
|
вия [21]:
-порядок объекта n и величина запаздывания d известны (структурная адекватность);
-измерение входного сигнала u(k) U (k) U – производятся без оши-
бок, и известно установившееся значение входа U ;
-входной сигнал представляет собой возбуждающий процесс порядка не ниже n;
-на выходной сигнал x(k) X (k) X может действовать возмущение в
виде стационарного шума V (k) . Установившееся значение X известно и
равно величине U , умноженной на статический коэффициент усиления объекта;
-невязка e(k) не коррелированна с элементами вектора данных T (k) ;
-M e(k) .
При этом сходимость оценок зависит от выбора исходных значений
C( ) и θ(0).
Для получения вариации u(k) и y(k) необходимо либо иметь оценки
установившихся значений U и Y , либо перестроить алгоритм оценивания.
Использование разностей.
Так для получения вариаций в отсутствие информации об установившихся значениях переменных переходят к разностям
199
U (k) U (k ) u(k) u(k ) u(k) |
(4.91) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
Y (k) Y (k ) y(k) y(k ) y(k) |
|
||||||||||||
В процедуре (4.85) используют разности (4.91). |
|
||||||||||||
Текущее усреднение. |
|
||||||||||||
Другой подход состоит в оценке текущего среднего значения [21] |
|
||||||||||||
|
|
|
|
|
|
(k ) Y (k) Y |
(k ) , |
|
|||||
Y |
(k) Y |
(4.92) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
k |
|
||
|
|
|
|
(k ) U (k) U |
(k ) , |
|
|||||||
U |
(k) U |
(4.93) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
k |
|
||
и переход к вариациям по формулам |
|
||||||||||||
|
|
|
(k) . |
|
|||||||||
u(k) U (k) U |
(4.94) |
||||||||||||
|
|
|
(k) |
|
|||||||||
|
y(k) Y (k) Y |
|
|||||||||||
Оценивание свободного члена.
Третий подход связан с введением постоянной составляющей (константы), являющейся совместной оценкой установившихся уровней. Так, если разности (4.76) подставить в уравнение (4.75), то после преобразований имеем
X (k) a1 X (k 1) ... an X (k n) b1U (k d 1) ... bmU (k d m) q ,
|
|
|
|
|
|
(4.95) |
где константа |
|
|
|
|
||
q 1 a1 ... an |
|
b1 |
... bm |
|
. |
|
X |
U |
(4.96) |
||||
Если расширить вектор (k ) константой |
q , а вектор данных T (k) |
|||||
составляющей Y , то можно в процедуре (4.85) использовать непосредственные измерения Y (k) и U (k) .
При этом будем получать и оценку . Если априори известно U или Y , то по (4.88) при известном (оцененном) легко вычислить другое установившееся значение Y или U .
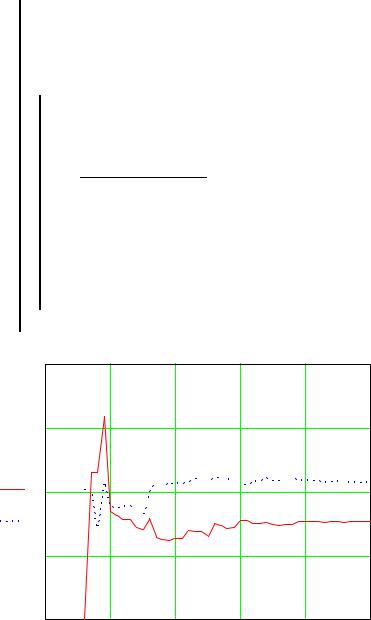
Пример 4.2. Модель апериодического звена первого порядка описывается уравнениями размерности n 1, d 5, m 0
x(k) axk 1 buk 1 d – уравнение состояния;
y(k) xk Vk – уравнение наблюдения.
Здесь Vk – дискретный гауссовский белый шум с параметрами
M Vk , D Vk v ;
U k – дискретный гауссовский процесс с параметрами
M Uk , D Uk u .
Поскольку входной сигнал представляет собой центрированный процесс, т.е. вариацию относительно нуля, то и выходной процесс представляет
200

1 C T y |
|
|
|
|
|
|
|
|
|
0.75 |
|
0.779 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
T |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.072 |
1.106 |
|
|
|
|
||
Процедура РМНК |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
0 |
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
||
0 |
|
1 |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
d |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cd |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
for k d 1 N d |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
y |
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
uk 1 d |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
k |
|
|
|
Ck 1 k |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
T |
Ck 1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
1 |
k |
|
k |
|
|
|
|
|
|
|
||||||
|
|
|
C |
C |
|
|
|
k |
|
T |
C |
|
|
|
|
|
|
|
|||
|
|
|
|
k |
|
k 1 |
|
|
|
k |
k 1 |
|
|
|
|
|
|
|
|||
|
|
|
e |
k |
y |
k |
T |
k 1 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
k k 1 k ek |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.75 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N d |
|
|
||
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.072 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.779 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
||
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.106 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
00 |
|
|
|
10 |
|
|
|
|
20 |
30 |
40 |
50 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.5. Продолжение |
|
|
|
|
|||
202