

Часть 2
Распределение напряжения вдоль линии. На рис. 1 представлена трехфазная линия с токовыми нагрузками, присоединенными в точках С и Ш.
Определив потери напряжения на участках линии, можно построить график I.

Рис.1. Распределение напряжения в линии при пуске электродвигателя.
Скачкообразные изменения нагрузки связаны главным образом с включением в сеть приемников большой мощности, что вызывает повышенную потерю напряжения в сети и, следовательно, снижает напряжения на зажимах приемников ( U'c меньше Uc)-
Для асинхронных двигателей с короткозамкнутым ротором ток включения (пусковой ток) превышает номинальный в 4-7 раз, из-за чего непосредственное включение крупных двигателей существенно влияет на работу присоединенных к сети приемников. При этом резко снижают световой поток («мигание света»), а работающие двигатели замедляют ход и при некоторых условиях могут совсем остановиться. Кроме того, может случиться, что сам пускаемый двигатель не сможет при пуске развернуть присоединенный к нему механизм.
Необходим расчет, который позволил бы решить вопрос о том, допустимо ли при заданных условиях непосредственное включение в сеть короткозамкнутого двигателя. Этот вопрос имеет большое практическое значение, так как короткозамкнутый двигатель при прямом включении на сеть является наиболее простым, дешевым и надежным электроприводом.
При эксплуатации электрической сети возможны аварийные отключения отдельных ее участков. Если длительность перерыва в электроснабжении превышает несколько десятков секунд, то все двигатели, присоединенные к участку сети, остановятся. При возобновлении подачи напряжения двигатели, не имеющие защиты минимального напряжения, одновременно пускаются в ход.
Для увеличения надежности питания в электросети применяется автоматическое включение резерва (АВР) и автоматическое повторное включение (АПВ). Действие АВР заключается в том, что потерпевший аварию элемент сети (линия или трансформатор) автоматически заменяется резервным.
В случае применения АПВ элемент сети, отключенный действием защиты от коротких замыканий, автоматически повторно включается на короткое замыкание 1 или 2 раза. Опыт показал, что во многих случаях за время перерыва в питании между отключением и повторным включением и электроснабжение возобновляется.
Перерыв в питании электроэнергией при действии АВР и успешном действии первого цикла АПВ не превышает 0,5 - 2,5 сек. За этот короткий промежуток времени двигатели не успевают остановиться полностью и лишь снижают скорость.
Скорость снижается также при коротком замыкании, во время которого напряжение в сети понижается тем больше, чем ближе рассматриваемый участок к месту повреждения. Величина снижения скорости и величины пускового тока двигателей зависят от быстроты отключения короткого замыкания защитой. Чем быстрее отключен поврежденный участок, тем меньше влияния оказывает снижение напряжения в сети на работу присоединенных к ней двигателей.
Одновременный успешный самозапуск всех присоединенных к сети двигателей часто бывает невозможным, так как из-за большого снижения напряжения многие двигатели не могут преодолеть моменты сопротивления присоединенных к ним механизмов. Поэтому электродвигатели должны быть разделены на две группы.
В первую группу включаются двигатели механизмов, остановка которых не влечет за собой нарушения ответственного технологического процесса или опасности для здоровья и жизни людей.
Во вторую группу включаются двигатели ответственных механизмов: подъемников и вентиляторов шахт, некоторых электроприводов металлургических и химических заводов и т. п.
Двигатели первой группы снабжаются защитой минимального напряжения (в виде реле, катушки контактора или расцепителя автомата) и при временном прекращении питания отключается от сети.
Двигатели второй группы не имеют защиты минимального напряжения, и после прекращения или временного снижения напряжения остаются подключенными к сети, благодаря чему обеспечивается возможность их самозапуска при возобновлении подачи нормального напряжения.
Предположим, что к линии, питающей сборные шины распределительного пункта Ш (рис.1), присоединяется короткозамкнутый двигатель Д. За источник питания И, этой линии принимаются шины распределительного устройства подстанции или электростанции, на которых при пуске двигателя напряжение практически не изменяется.
При включении двигателя по линии пойдет его пусковой ток, который належится на существующий ток нагрузки линии и вызовет в линии дополнительную потерю напряжения. Вследствие этого во всех точках сети напряжение мгновенно понизится. Чем дальше от источника питания, тем больше будет изменение напряжения. Распределение напряжений в линии при пуске двигателя будет соответствовать графику II на рис.1.
При нормальных условиях через короткий промежуток времени после начала пуска, измеряемый секундами, двигатель разовьет нормальную скорость и пусковой ток уменьшится до величины рабочего тока двигателя. При этом напряжение во всех точках сети возрастет до значений, соответствующих графику III.
Условия допустимости пуска короткозамкнутого двигателя прямым включением в сеть состоят в следующем:
а) Пускаемый двигатель должен сдвинуть с места и развернуть до нормальной ско рости присоединенный к нему механизм.
б) Снижение напряжения в сети при пуске не должно нарушать работу присоеди ненных к сети двигателей.
в) Колебания напряжения при пуске не должны оказывать заметного влияния на работу осветительных ламп и радиоприборов.
Чтобы проверить возможность пуска короткозамкнутого двигателя, необходимо подсчитать напряжения на его зажимах в момент пуска и на зажимах любого другого работающего двигателя при пуске проверяемого двигателя, а также колебания напряжения в осветительной сети.
Принятые обозначения электрических величин. Напряжение обозначается буквой U с индексом, соответствующим рассматриваемой точке сети. Например, для точки С сети (рис.1) напряжение до момента пуска двигателя обозначается Uc . Напряжение в точке С сети в момент пуска двигателя обозначается U'c -
Колебание напряжения обозначается буквой V. Для точки С сети колебание напряжения (рис.1) равно:
![]() (1)
(1)
Разность между величинами напряжений двух точек сети называется потерей напряжения на участке сети между этими точками. Потеря напряжения обозначается буквой Δ. Потеря напряжения от источника питания И до точки С будет равна:
до пуска электродвигателя
![]() (2)
(2)
в момент пуска электродвигателя
![]() (3)
(3)
Во многих случаях величины напряжения, потери и колебания его удобнее вычислять не в вольтах, а в относительных единицах.
Например,
относительная величина напряжения на
зажимах электродвигателя Д
в момент пуска обозначается через
![]() и определяется по следующей формуле
и определяется по следующей формуле
![]() (4)
(4)
где UН- номинальное напряжения электросети или равное ему номинальное напряжение электродвигателя, в;.
Iн - номинальный ток электродвигателя, а; Iп- пусковой ток электродвигателя при пуске с номинальным напряжением на зажимах, а; I'п — пусковой ток электродвигателя с учетом снижения напряжения на его зажимах при пуске, а.
Определение колебаний напряжения в сети при пуске короткозамкнутого двигателя.
![]()
Левая часть полученного равенства представляет собой дополнительную потерю напряжения в сети от источника питания Я до точки С, правая - колебание напряжения в точке С.
Для упрощения:
![]() (5)
(5)
Формула остается справедливой для любой точки сети.
![]() (6)
(6)
Напряжение на зажимах двигателя в момент пуска.
Из диаграммы напряжений (рис.1) следует, что напряжение на зажимах двигателя Д в момент пуска равно разности напряжения на шинах распределительного пункта, к которому подключается двигатель Uш, и дополнительной потери напряжения в сети от источника питания И до зажимов двигателя Д, вызванной прохождением в сети пускового тока двигателя:
![]() (7)
(7)
Потеря напряжения в линии от источника питания до зажимов двигателя от пускового тока может быть определена по формуле
![]() (8)
(8)
Значения активного RД и индуктивного ХД сопротивлений в формуле (8) должны определяться от шин «источника питания» до зажимов пускаемого двигателя.
Что принимается за источник питания.
Для маломощных двигателей низкого напряжения шины распределительного щита 380-660 В. Если мощность двигателя составляет 15-20% мощности трансформатора, то следует принимать во внимание сопротивления обмоток трансформатора и источником питания считать шины высшего напряжения понижающей трансформаторной подстанции.
При пуске крупных высоковольтных двигателей 6-10 кВ, помимо сопротивлений линий сети, к которой они присоединены, и сопротивлений понижающих трансформаторов, приходится принимать во внимание сопротивление линий питающей сети высшего напряжения 6-35 кВ.
При расчете сопротивлений всех элементов питающей сети последние должны быть приведены к ступени напряжения, к которой подключен двигатель.
![]() (9)
(9)
где RB и XB - сопротивления сети со стороны высшего напряжения, Ом; RH и ХH -приведенные значения этих сопротивлений по отношению к стороне низшего напряжения, Ом; п - коэффициент трансформации понижающего трансформатора.
Пусковой
ток двигателя I’П
прямо
пропорционален значению относительного
напряжения на его зажимах в момент пуска
![]() :
:
![]()
где /я - пусковой ток при номинальном напряжении на зажимах двигателя, а; г/ -кратность пускового тока при номинальном напряжении на зажимах двигателя; /// - номинальный ток двигателя, а.
Коэффициент мощности при пуске короткозамкнутого асинхронного двигателя cos cpn определяется как среднее арифметическое величин, подсчитанных по двум следующим формулам:
где cos<pH - коэффициент мощности; г/н - к.п.д.; тп - кратность начального момента; г- кратность пускового тока; sh - скольжение при номинальных нагрузке и напряжении асинхронного двигателя; у - коэффициент, равный отношению переменных потерь активной мощности в двигателе к суммарным потерям.
Для сокращения записи введем обозначение
![]()
cos ср п и sin q>n - в паспорте
Относительная величина напряжения на зажимах двигателя. Выражение (7) в относительных единицах может быть представлено в следующем виде:
Последнее равенство с учетом выражения (8), (10) и (13) переходит в следующее:
![]()
отсюда получим формулу для определения относительной величины напряжения на зажимах двигателя Д в момент пуска
ш можно без расчета принять равным единице.
*
При неподвижном роторе скольжение s двигателя равно 1 и развиваемый им момент называется пусковым или начальным моментом тп- На кривой / кратность пускового момента двигателя представлена точкой а.
Рис. 4 Механические характеристики асинхронного электродвигателя и механизма с
т/< вентиляторным моментом сопротивления
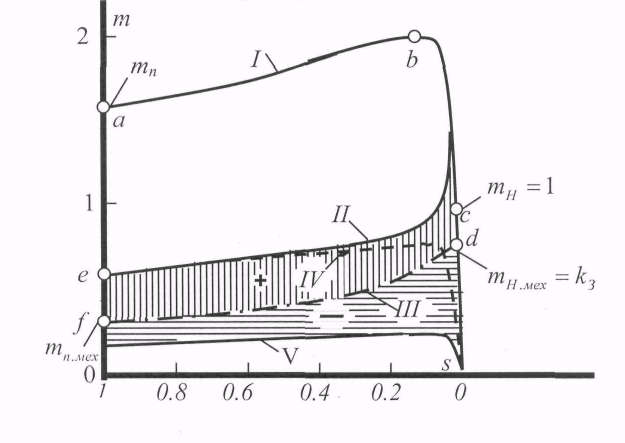
При увеличении скорости скольжение уменьшается и развиваемый двигателем момент возрастает до максимальногозначения, которое называется опракидывающим или критическим моментом двигателя тм . Кратность максимального(опрокидывающего) момента двигателя на рис.4 определяется точкой Ь.
Построение механической характеристики двигателя.
где s - скольжение, при котором определяется момент двигателя; sm - критическое
скольжение, при котором развиваемый двигателем момент достигает максимальной величины:
![]()
q - величина, определяемая из выражения

В формуле (24) sh представляет собой номинальное скольжение двигателя, т.е. скольжение при номинальных условиях его работы:
![]()
где пн - номинальная скорость вращения электродвигателя, об/мин.
Механические характеристики механизмов,
Для большой группы механизмов зависимость момента сопротивления от скольжения может быть выражена формулой:

где топ иех - кратность пускового (начального) момента сопротивления механизма по
отношению к номинальному моменту механизма; р - показатель степени, зависящий от типа механизма и условий его работы; п - скорость вращения агрегата, об/мин; пн~ номинальная скорость вращения агрегата, об/мин.
При изучении режимов пуска и самозапуска двигателей для непосредственного сравнения моментов двигателей и соединенных с ними механизмов удобнее моменты механизма определять в долях номинального момента двигателя.
Момент сопротивления механизма в долях номинального момента двигателя определяется умножением значения того же момента в долях номинального момента механизма на отношение номинальных моментов механизма и электродвигателя МнМЕХ IМ н. Это
отношение характеризует степень использования номинальной мощности электродвигателя при вращении присоединенного к нему механизма и называется коэффициентом загрузки двигателя.
Коэффициент загрузки может быть также определен как отношение номинальной мощности, необходимой для нормальной работы механизма, Рн МЕХ к номинальной мощности двигателя:
Умножив обе части уравнения (27) на коэффициент загрузки двигателя, получим следующую формулу, в которой моменты сопротивления механизма выражены в долях номинального момента двигателя:
При помощи формул (22) и (26) можно получить следующее соотношение:
которое позволяет представить зависимость момента сопротивления механизма от скольжения двигателя в следующем виде:

Примеры механических характеристик механизмов.
Для значения показателей степени р=0 момент сопротивления механизма не зависит от скольжения и сохраняет постоянную величину в любой момент пуска или самозапуска для любой скорости вращения механизма тМЕХ - &3 (шаровые мельницы, транспортеры, шнеки).
Рис.5. Механические характеристики механизмов.
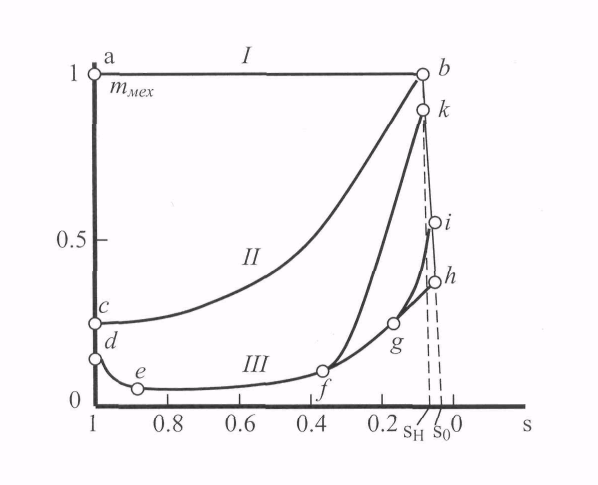
Значение р=2 имеют механизмы с вентиляторным моментом сопротивления. К таким механизмам относятся вентиляторы, дымососы, трубокомпрессоры. Пусковой момент механизмов с вентиляторным моментом сопротивления обычно не превосходит 0,1-0,3 номинального. Механическая характеристика для механизма с вентиляторным моментом сопротивления представлена на рис.5 кривой //. Далее момент уменьшается до точки е за счет уменьшения трения подшипников.
Если при пуске насосного агрегата задвижка трубопроводного агрегата закрыта, то момент изменится по efgh.Ecjiu теперь задвижка открывается, то момент изменится по линии hb. При пуске насоса с открытой задвижкой с обратным клапаном, характеристика будет такая же. При подаче воды по коротким водоводам, клапан откроется в точке/При подаче воды по длинным водоводам - в точке g. В первом случае момент изменится по линии defkb, а во втором - по линии defgib.
Зависимость напряжения на зажимах двигателя от скольжения двигателя представлена на рис. 6 кривой //, построенной по уравнению (32).
Развиваемый двигателем момент с учетом снижения напряжения на его зажимах при заданном значении скольжения может быть определен следующим образом. Для данного значения скольжения по кривой /на рис. 4 определяется величина развиваемого двигателем момента при номинальном напряжении на зажимах, а по кривой //на рис. 6 или формуле (32) - величина относительного напряжения на зажимах двигателя. Величина развиваемого двигателем момента вращения с учетом снижения напряжения на его зажимах для заданного скольжения вычисляется по формуле (29).
На рис.4 кривая // представляет собой зависимость развиваемого двигателем момента при пуске с учетом изменения величины пускового тока.
Предположим, что асинхронный двигатель, механическая характеристика которого с учетом снижения напряжения на его зажимах при пуске представлена на рис.4 кривой //, соединен с механизмом, для которого момент сопротивления выражается формулой (28) (кривая /// на рис.4).
Избыточный момент и время разбега.
Из рис. 4 видно, что развиваемый двигателем момент в течение всего времени пуска при изменении скольжения от 1 до номинального значения (кривая //) превышает момент сопротивления соединенного с ним механизма (кривая III). Разность ординат этих кривых называется избыточным моментом. Двигатель при пуске сможет сдвинуть с места и развернуть до номинальной скорости присоединенный к нему механизм только при условии, что избыточный момент в течение всего периода пуска положителен. Чем больше величина избыточного момента, тем быстрее заканчивается пуск агрегата.
Продолжительность пуска агрегата называется временем его разбега.
Длительность времени разбега определяется величиной избыточного момента и механической постоянной времени агрегата (см. формулу (34)).
Время разбега может быть определено графо-аналитическим методом с помощью механических характеристик двигателя и приводимого механизма. Для этого строят кривую зависимости избыточного момента агрегата от скольжения. Ординаты кривой избыточного момента определяются как разность между величиной вращающего момента двигателя и величиной момента сопротивления механизма при заданном значении скольжения.
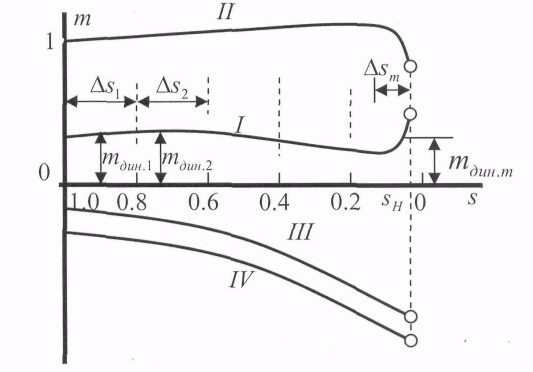
Рис. 7. Кривые динамических моментов агрегата при разбеге и выбеге
На рис.4 избыточные моменты для любого значения скольжения определяются расстоянием по вертикали кривыми II и III. Область избыточных моментов на рис. 4 заштрихована вертикальными линиями и отмечена знаком «+», так как избыточный момент ускоряет вращение агрегата. Зависимость избыточного момента от скольжения при пуске агрегата для указанного примера представлена кривой /на рис. 7.
Разбив площадку между кривой /и горизонтальной осью на ряд участков, можно определить время разбега агрегата в секундах из выражения
![]()
где Д5,,Д52,...,Л5Ш - приращения величины скольжения соответственно 1-го, 2-го,..., т-го участка; при разбеге агрегата эти приращения отрицательны, так как скольжение агрегата уменьшается; mdwil,mduii2,...,mdwim - средние величины относительных избыточных моментов соответственно для тех же участков; Та - механическая постоянная времени агрегата в секундах, определяемая по формуле
![]()
Условия, обеспечивающие нормальный пуск двигателя.
Нормальный пуск двигателя можно считать обеспеченным, если избыточный момент на протяжении всего времени разбега будет не меньше чем 10 % превышать момент сопротивления механизма. Механическая характеристика современного асинхронного двигателя такова, что выполнение этого условия почти всегда удовлетворяется для всего времени разбега, если оно выполнено для начального момента пуска.
Для проверки допустимости пуска механизма с асинхронным двигателем достаточно сравнить пусковые (начальные) моменты двигателя и механизма.
Кратность пускового момента механизма по отношению к номинальному моменту двигателя определяется умножением кратности этого же момента по отношению к номинальному моменту сопротивления механизма топ )/ст на коэффициент загрузки электродвигателя &3:
![]()
На рис. 4 кривая V представляет собой механическую характеристику электродвигателя при коротком замыкании в сети, если остаточное напряжение на зажимах двигателя равно 0,3 номинального. Развиваемый при этом вращающий момент уменьшается в 1/0,32=11 раз по сравнению с величиной момента при номинальном напряжении на зажимах двигателя.
Тормозной момент агрегата в рассматриваемом случае определяется разностью момента двигателя (кривая V) и момента сопротивления механизма (кривая III). Область тормозных моментов на рис. 4 заштрихована горизонтальными линиями и отмечена знаком «-», так как тормозной момент замедляет движение агрегата.
Избыточный и тормозной моменты агрегата называются соответственно динамическими положительным и отрицательным моментами. Ускорение вращения агрегата происходит при положительном динамическом моменте, а замедление - при отрицательном.
Время выбега агрегата, т.е. время, в течение которого агрегат остановится при режиме торможения, может быть определено графически.
![]()
![]()
![]()
С![]()
а вероятность этого события
![]()
![]()
![]()
![]()