

Порядок выполнения работы:
Рассмотрим основные пункты главного меню:
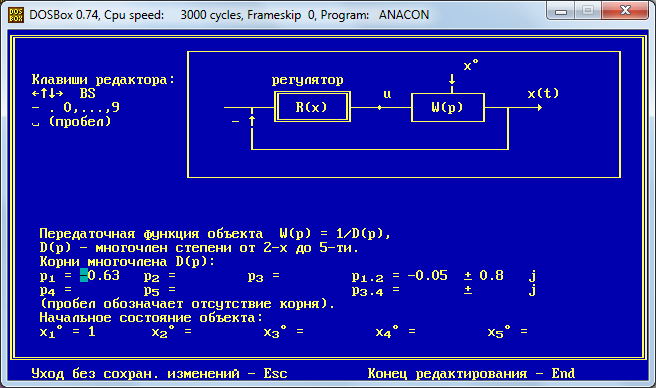
1) Ввод параметров задачи.
В этом разделе вводятся данные для решения задачи или изменяются ранее введенные данные. Далее нужно задать начальные значения фазовых координат объекта (хотя бы одно из них должно быть ненулевым).
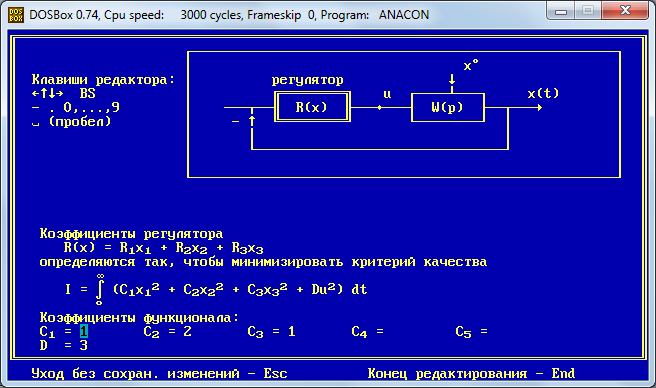
На втором этапе ввода задаются коэффициенты квадратичного функционала. Незаданные начальные значения и коэффициенты считаются равными нулю.
2) Решение задачи.
В программе заложено два метода решения задачи аналитического конструирования.
- Метод Р. Калмана. В этом методе коэффициенты регулятора находятся из алгебраического уравнения Рикатти. Уравнение решается оперативным методом. На экран выводится число, которое служит показателем сходимости процесса. Это число должно уменьшаться до нуля, но изменение не обязательно монотонное. Счет можно прервать, нажав [Esc].
- Метод А.М. Летова. Этот метод не работает, если упомянутый многочлен имеет чисто мнимый корень, но если исключить эту ситуацию, то этот метод проще реализуется на ПК, чем метод Калмана, для задач с одним управляющим воздействием.
3) Результаты счета.
На экран выводятся условия задачи и результаты счета: коэффициенты регулятора и корни замкнутой системы.

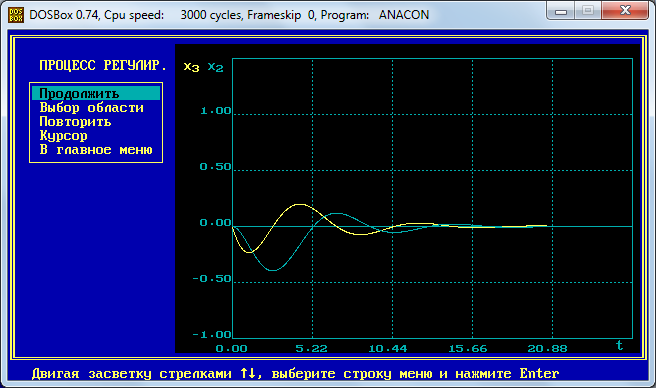
4) Переходный процесс.
Для построения нужно выбрать одну или две функции из числа фазовых координат и управления.


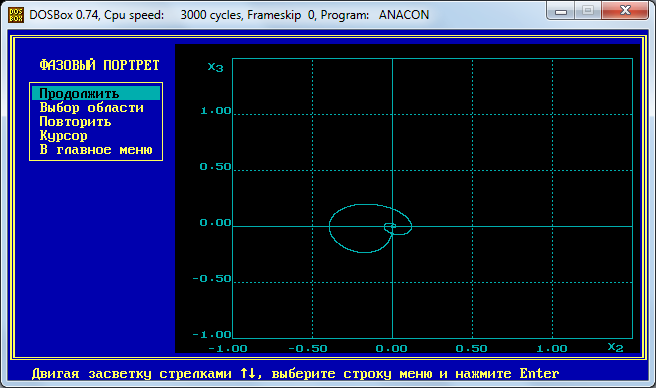
5) Фазовый портрет.
Нужно выбрать две функции из числа указанных выше и построить график зависимости между ними.

Содержание отчета
Отчет должен содержать следующие результаты работы:
Структурная схема и передаточная функция объекта регулирования;
Коэффициенты характеристического уравнения и передаточной функции;
Графики переходных процессов
Фазовые траектории, соответствующие устойчивым системам регулирования.
Лабораторная работа №2.
Задача быстродействия. Одно управляющее воздействие в разомкнутом контуре регулирования
Цель: Ознакомиться с порядком работы Файла optim.exe.Пакет для исследования предельных возможностей системы авторегулирования, обусловленных ограничением величины управляющего сигнала.
Оборудование: компьютерный класс с установленным программным комплексом TAY
Теоретическая часть
Вопрос о том, каково минимально возможное время регулирования при простейших возмущающих воздействиях на объект (импульс, скачок) неизбежно возникает.
Решение этой задачи возможно по методу Л.С. Понтрягина. Метод – итерационный, оценка времени регулирования в процессе счета уточняется, монотонно возрастая. Для контроля за сходимостью вычислительного процесса выводятся 3 числа: номер итерации, время регулирования и число, которое служит показателем сходимости процесса.

Здесь W(p) – передаточная функция объекта вида W(p)=1/D(p),
D(p) – многочлен степени от 2-х до 5-ти,
x(t) – выходной сигнал,
х0– вектор начальных значений фазовых координат объекта (выходного сигнала х(t) и его производных до (n-1)-го порядка, где n – порядок объекта),
u(t) – управляющий сигнал, который вырабатывается программатором и может принимать значение +М и –М.
Задача быстродействия состоит в нахождении управления u(t), которое переводит объект из заданного состояния х0 в нулевое состояние по всем фазовым координатам за минимальное (оптимальное) время tрег.