

Поляризованные электромагнитные системы
Поляризованные электромагнитные системы отличаются от рассмотренных выше наличием двух не зависящих друг от друга магнитных потоков: постоянного, не зависящего от состояния схемы, в которую включен механизм, ипеременного, зависящего от состояния схемы, в которую включен механизм. Первый, поляризующий, поток Фпсоздается либо постоянным магнитом (рис. 5-13, а), либо электромагнитом с независимым питанием. Второй, рабочий, поток
ФЭсоздается электромагнитом. Значение и направление рабочего потока зависят от состояния схемы, в которую включен механизм.
Принцип действия. Образованный
магнитом 3 поляризующий поток Фп,
пройдя через якорь 2, разветвляется.
Одна его часть ФП1 проходит через
зазор![]() 1:
и левую часть сердечника1. Вторая
его часть ФП2проходит через зазор
1:
и левую часть сердечника1. Вторая
его часть ФП2проходит через зазор![]() 2и правую часть сердечника. Катушками4
и4', надетыми на сердечник и
включенными согласно, создается рабочий
поток. Основная его часть Фэзамыкается через весь воздушный зазор
2и правую часть сердечника. Катушками4
и4', надетыми на сердечник и
включенными согласно, создается рабочий
поток. Основная его часть Фэзамыкается через весь воздушный зазор![]() 1:+
1:+![]() 2и сердечник, охватывая обе катушки.
Меньшие части этого потока Ф4и
Ф
2и сердечник, охватывая обе катушки.
Меньшие части этого потока Ф4и
Ф![]() 4замыкаются через якорь, соответствующий
воздушный зазор и часть сердечника,
охватывая только одну катушку.
4замыкаются через якорь, соответствующий
воздушный зазор и часть сердечника,
охватывая только одну катушку.

Рис. 5-13. Принцип устройства поляризованной магнитной системы
При наличии только одного поляризующего
потока якорь отклонится к одному из
полюсов магнита, так как с уменьшением
зазора (в нашем примере
![]() 1)
часть поляризующего потока в этом зазоре
увеличится за счет уменьшения его доли
в другом зазоре. При появлении рабочего
потока в одном из зазоров будем иметь
разность потоков, а в другом — сумму. В
нашем примере в зазоре
1)
часть поляризующего потока в этом зазоре
увеличится за счет уменьшения его доли
в другом зазоре. При появлении рабочего
потока в одном из зазоров будем иметь
разность потоков, а в другом — сумму. В
нашем примере в зазоре![]() 1— поток ФП1— Фэ— Ф4, в зазоре
1— поток ФП1— Фэ— Ф4, в зазоре![]() 2— поток Фп2+ Фэ+ Ф4.
По мере увеличения рабочего потока
поток в зазоре
2— поток Фп2+ Фэ+ Ф4.
По мере увеличения рабочего потока
поток в зазоре![]() 1будет все уменьшаться, а в зазоре
1будет все уменьшаться, а в зазоре![]() 2— увеличиваться. При каком-то соотношении
потоков якорь перекинется на правую
сторону, т. е. система сработает.
2— увеличиваться. При каком-то соотношении
потоков якорь перекинется на правую
сторону, т. е. система сработает.
Для возврата системы в исходное положение
нужно изменить полярность тока (а,
следовательно, и потока) в рабочих
катушках. Можно настроить систему так,
что якорь вернется в исходное положение
при снижении рабочего потока и сохранении
его полярности. Для этого необходимо,
чтобы, перекинувшись вправо, якорь не
переходил через нейтральное положение
(рис. 5-13,б), т. е. чтобы при любом
положении якоря один и тот же воздушный
зазор оставался меньше другого (например,![]() 1
<
1
<
![]() 2).
Такая настройка называетсянастройкой
на преобладание. В магнитной системе
(рис. 5-13, в) якорь в зависимости от
полярности тока в рабочей катушке может
отклоняться в ту или другую сторону.
При обесточенной катушке якорь вернется
в нейтральное положение.
2).
Такая настройка называетсянастройкой
на преобладание. В магнитной системе
(рис. 5-13, в) якорь в зависимости от
полярности тока в рабочей катушке может
отклоняться в ту или другую сторону.
При обесточенной катушке якорь вернется
в нейтральное положение.
4.1.4. Основные характеристики и параметры реле
а) Основные параметры.Основными параметрами электромагнитных реле являются:
параметр срабатывания xcр– значение входного параметраxcр
(напряжения, тока и т.д.), при котором контакты из исходного состояния переходят в рабочее;
рабочий параметр – параметр xр(напряжение, ток), обеспечивающий надёжную работу контактов реле (xрвсегда большеxcр);
величина отпускания – значение входного параметра xcр, при котором контакты реле переходят из рабочего состояния в исходное;
коэффициент запаса по срабатыванию кср=
 и по отпусканию
и по отпусканию
котп.=![]() ;
;
коэффициент усиления ку=
 ,
показывающий во сколько раз управляемая
мощность (на контактах)Рконтбольше управляющей мощностиРу,
потребляемой катушкой;
,
показывающий во сколько раз управляемая
мощность (на контактах)Рконтбольше управляющей мощностиРу,
потребляемой катушкой;время срабатывания tср– время с момента подачи команды на срабатывание до момента начала возрастания выходного параметра;
время отпускания tотп– время, необходимое для полного размыкания контактов после снятия питания с катушки;
уставка по входному параметру – значения параметров срабатывания или отпускания, на которые отрегулировано реле.
б)Основные характеристики реле. Основными характеристиками электромагнитных реле являются:
1) тяговая (электромеханическая) Рэ=f(![]() )
– зависимость тяговых усилийРэ,
создаваемых на якоре электромагнита
магнитным полем катушки, от величины
хода якоря
)
– зависимость тяговых усилийРэ,
создаваемых на якоре электромагнита
магнитным полем катушки, от величины
хода якоря![]() (воздушного зазора);
(воздушного зазора);
2) нагрузочная (механическая) Рм=f(![]() )
– зависимость сил реакции исполнительных
и промежуточных органов реле от величины
хода якоря
)
– зависимость сил реакции исполнительных
и промежуточных органов реле от величины
хода якоря![]() ;
;
3) статическая Uвых =f(Uвх) – зависимость напряженияUвых в цепи управления от величины напряженияUвх, приложенного к катушке;
4) временная (характеристика переходного процесса) Iк=f(t) – зависимость тока в катушкеIкот времени при включении, работе и отключении реле.
Первые три характеристики жёстко зависят от конструкции реле и в процессе настройки и эксплуатации могут быть изменены лишь в малых пределах. Временные характеристики, наиболее важные с точки зрения применения реле в качестве элемента автоматических и телемеханических систем, могут меняться в значительных пределах без изменения конструкции реле. Это достигается путём включения параллельно или последовательно с цепью катушки реле сопротивлений и емкостей.
По виду статической характеристики реле разделяются на двух – и трёхпозиционные. Статическая характеристика двухпозиционного реле, имеющего два устойчивых состояния показана на рис. 4.2. На рис. 4.2 по оси абсцисс отложено значение входного параметра х, а по оси ординат — выходного параметрау.
До тех пор, пока х<хСР, выходной параметру равен нулю либо своему минимальному значениюymin (для бесконтактных аппаратов).
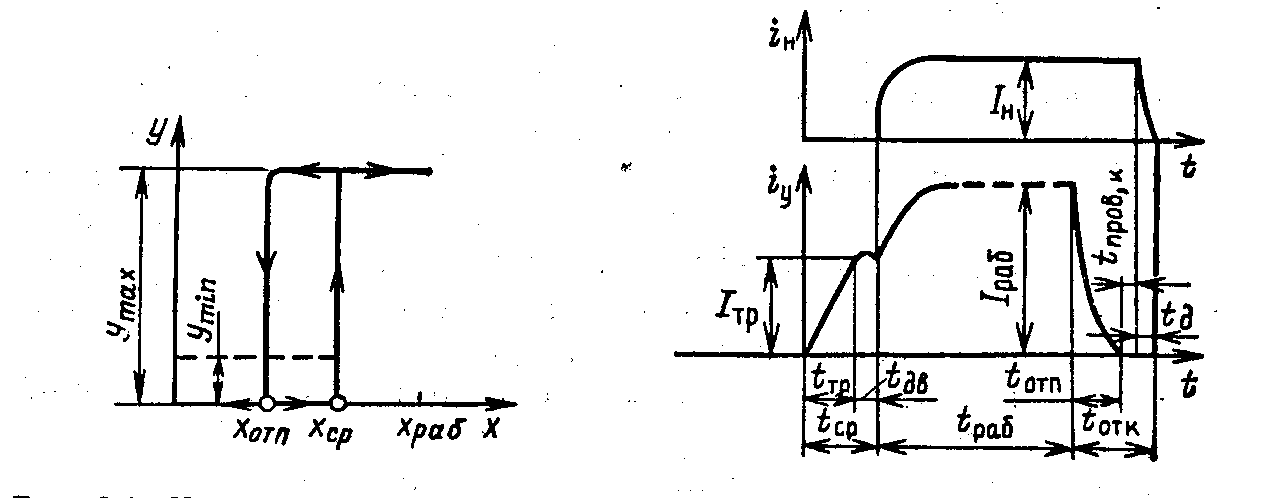
Рис. 4.2. Характеристика управления реле Рис. 4.3. Выходной и входной параметры
электромагнитного реле
При х=хср выходной
параметр скачком меняется отyminдоymах..
Происходит срабатывание реле. Если
после срабатывания уменьшать значение
входного параметра, то прих![]() хОТП происходит
скачкообразное возвращение выодного
параметра от значенияутах
до 0 илиymin— отпускание реле. Подобную характеристику
имеют, например, электромагнитные реле.
Входным сигналом для них является ток
в обмотке или напряжение на ней, а
выходным – ток или напряжение нагрузки,
коммутируемой контактами реле.
хОТП происходит
скачкообразное возвращение выодного
параметра от значенияутах
до 0 илиymin— отпускание реле. Подобную характеристику
имеют, например, электромагнитные реле.
Входным сигналом для них является ток
в обмотке или напряжение на ней, а
выходным – ток или напряжение нагрузки,
коммутируемой контактами реле.
На рис. 4.3 даны зависимости входного iy и выходногоiнпараметров электромагитного реле от времени. Входным параметром в данном случае является ток в обмотке реле, выходным — ток в управляемой цепи (цепи нагрузки).
Для рис. 4.3 принято, что включение обмотки реле происходит при t=0. При t = tтрякорь электромагнита реле трогается и начинает движение. В течение времениtдв якорь перемещается и в конце хода замыкается контакт в цепи нагрузки. Ток нагрузкиiнвозрастает от нуля до установившегося значенияIн. Времяtтр=tтр+ tдвназывают временем срабатывания реле. После этого ток в обмотке реле продолжает расти до установившегося значенияIраб. При отключении реле из рабочего состоянияtрабцепь его обмотки разрывается и ток в ней спадает. В момент времениtотп, когда усилие противодействующей пружины становится больше электромагнитного усилия, происходит отпускание якоря. Контакты реле разомкнутся после выбора провала контактов через времяtпров.к. После размыкания контактов загорается дуга, которая погаснет через времяtди ток в нагрузкеiн= 0. Времяtотк =tотп +tпров.к. +tдназывается временем отключения.