

5.1.6. Короткозамкнутый виток
Если отрывное усилие электромагнита будет Ротр, то дважды за период в точкеА (рис. 5-5,в) якорь электромагнита будет отпадать, а в точкеВ — снова притягиваться, т. е. будет вибрировать с двойной частотой. Вибрация приводит к износу магнитной системы и сопровождается гудением.
Для устранения вибрации электромагниты переменного тока снабжаются ко-роткозамкнутыми витками (рис. 5-6, а) из проводниковых материалов (медь, латунь), охватывающими часть полюса электромагнита (70 — 80%).
Принцип работы витка заключается в
следующем. Общий поток электромагнита
Ф разветвляется на поток Ф1, который
проходит по не охваченной витком части
полюса, и на поток Ф2, который
проходит через часть, охватываемую
короткозамкнутым витком. При этом в
витке индуцируется ЭДСеКЗ
и возникает токiКЗ,
сдвинутый по отношению кеКЗ,
на угол![]() 0и определяемый весьма незначительной
индуктивностью витка. Для упрощения
принимаем
0и определяемый весьма незначительной
индуктивностью витка. Для упрощения
принимаем
![]() 0
= 0. ТокiКЗвозбуждает магнитный поток Фкз,
который охватывает короткозамкнутый
виток и вместе с частью основного потока
образует поток Ф2,
0
= 0. ТокiКЗвозбуждает магнитный поток Фкз,
который охватывает короткозамкнутый
виток и вместе с частью основного потока
образует поток Ф2,
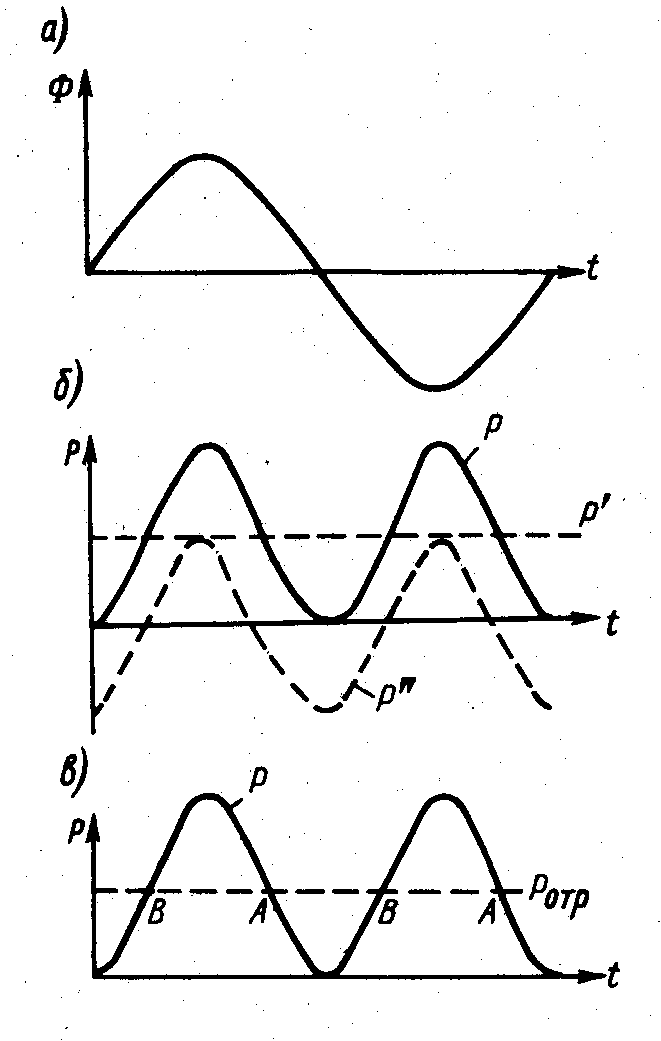
Рис. 5-5. Кривые изменения силы притяжения электромагнита переменного тока без короткозамкнутого витка
проходящий через часть полюса, охваченную
витком, и сдвинутый во времени по
отношению к потоку Ф1на угол![]() (рис. 5-6,б и в).
(рис. 5-6,б и в).
Сила притяжения электромагнита Р складывается из двух пульсирующих, но сдвинутых во времени силP1иР2 (рис. 5-6, г). Благодаря сдвигу их во времени общая силаР пульсирует много меньше и минимальное значение ее остается выше Ротр, чем и исключается вибрация якоря.
Каждая из сил P1 иР2 может быть представлена в виде двух составляющих:
Р1
=
![]() -
-![]() cos 2
cos 2![]() t;
(5-31)
t;
(5-31)
Р2
=
![]() -
-![]() cos 2(
cos 2(![]() t-
t-![]() );
(5-32)
);
(5-32)
Полная сила
Р =
![]() +
+![]()
![]() .
(5.33)
.
(5.33)
Р =
![]() +
+![]() -постоянная
составляющая;
-постоянная
составляющая;
![]() -переменнаясоставляющая.
-переменнаясоставляющая.
Амплитудное значение Р12т (рис 5-6,д) переменной составляющей
Р12т =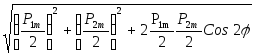 . (5-34)
. (5-34)
тогда полная сила
Р =
![]() +
+![]() -
- . (5-35)
. (5-35)
Как видно из уравнения (5-35), пульсация
зависит от угла сдвига
![]() ,
между потокамиФ1 и
Ф2. Под пульсацией силы
,
между потокамиФ1 и
Ф2. Под пульсацией силы![]() понимают отношение амплитудных
значений переменной и постоянной
составляющих:
понимают отношение амплитудных
значений переменной и постоянной
составляющих:
![]() =
=![]() .
(5-36)
.
(5-36)
Пульсация будет отсутствовать при Р12т = 0. Это возможно при одновременном выполнении двух условий: '
Р1m/2 = Р2m|/2, т.е. Ф1= Ф2;
2
 =
= ,
т. е. угол сдвига между потоками Ф1и Ф2должен быть 90°.
,
т. е. угол сдвига между потоками Ф1и Ф2должен быть 90°.
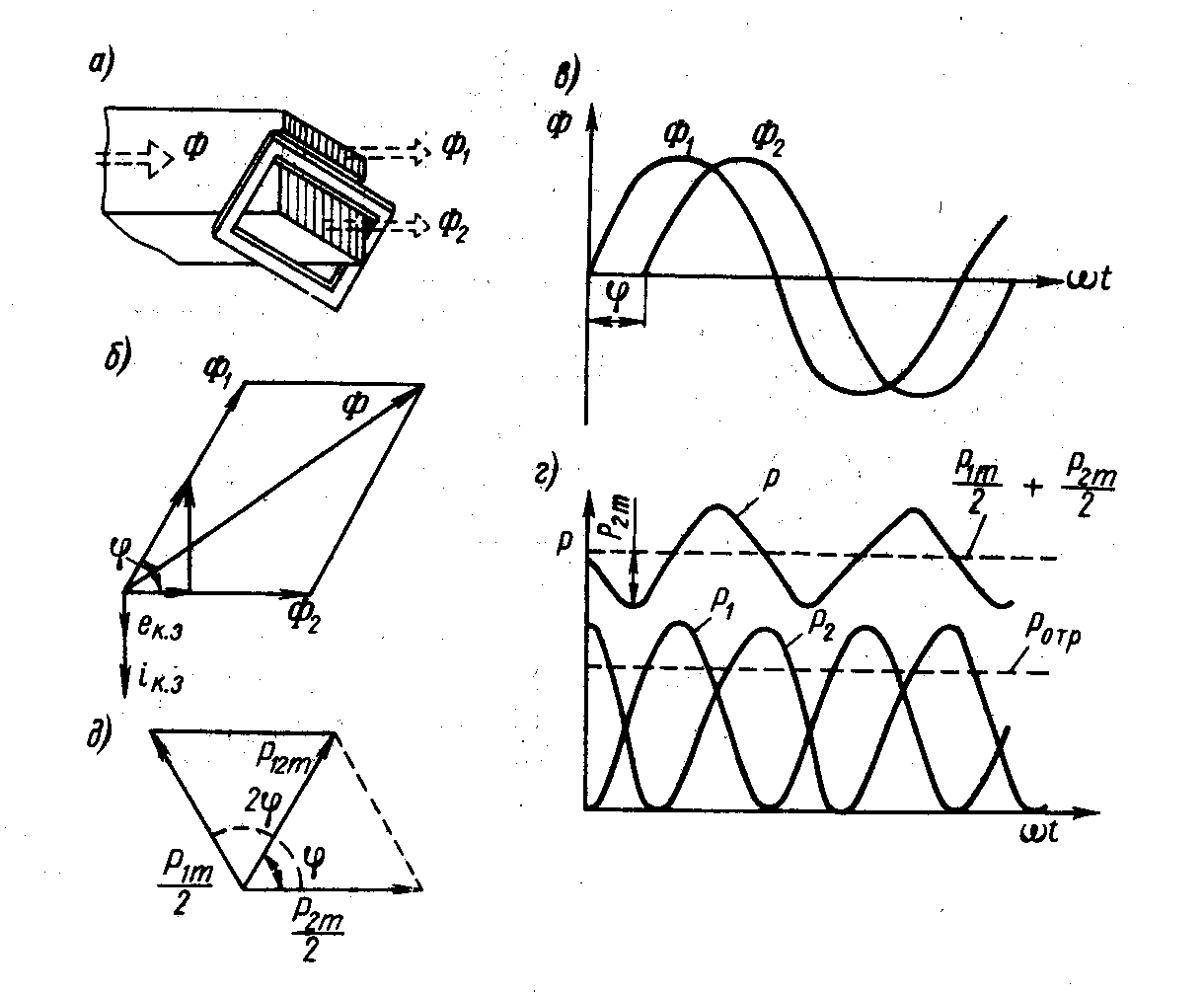
Рис. 5-6. Принцип работы короткозамкнутого витка в электромагнитных системах переменного тока
В системах с короткозамкнутым витком
достигнуть сдвига потоков на 90°
практически невозможно. В осуществляемых
системах
![]() =
50 ... 80°. Минимальное значение пульсации
получается при соблюдении первого
условия.
=
50 ... 80°. Минимальное значение пульсации
получается при соблюдении первого
условия.
5.1.7. Статические тяговые характеристики электромагнитов и механические характеристики аппаратов
Для удерживающих электромагнитов интерес представляет только сила Р, создаваемая электромагнитом при неизменном (притянутом) положении детали.
Для притягивающих электромагнитов нас
интересует зависимость создаваемого
электромагнитом усилия от рабочего
зазора Р=f(![]() )
или зависимость момента от угла раствора
якоряМ =f(
)
или зависимость момента от угла раствора
якоряМ =f(![]() ),
так как для приведения в действие того
или иного аппарата необходимо преодолеть
его противодействующие силы, изменяющиеся
по ходу якоря у разных аппаратов
по-разному. Примеры тяговых характеристик
некоторых электромагнитов приведены
на рис. 5-7.
),
так как для приведения в действие того
или иного аппарата необходимо преодолеть
его противодействующие силы, изменяющиеся
по ходу якоря у разных аппаратов
по-разному. Примеры тяговых характеристик
некоторых электромагнитов приведены
на рис. 5-7.
Под механической характеристикой
аппарата понимают зависимость суммарной
силы сопротивления, противодействующей
перемещению подвижной системы, от хода
якоря. Суммарная сила сопротивления
складывается из противодействующих
сил отключающих и контактных пружин,
веса подвижной системы и сил трения в
подшипниках и шарнирах между подвижными
деталями. При этом противодействующие
силы пружин и веса всегда направлены в
одну сторону независимо от направления
перемещения якоря, силы трения меняют
свое направление в зависимости от
направления движения якоря. Характеристики
обычно строятся: для прямоходовых
подвижных систем в осях «противодействующая
сила Ротр.— рабочий зазор![]() »,
для поворотных магнитных систем в осях
«противодействующий момент Мотр– угол поворота
»,
для поворотных магнитных систем в осях
«противодействующий момент Мотр– угол поворота![]() »,
где Ротр
»,
где Ротр
Рис. 5-7. Статические тяговые характеристики некоторых электромагнитных систем:
1 – 8 – формы систем и соответствующие им характеристики
.и Мотр– соответственно отрывные усилие и момент.
При включении
Ротр.= Рпруж.=![]() G+ Ртр(5-37)
G+ Ртр(5-37)
соответственно
Мотр= Мпруж.=![]() МG+Mтр; (5-38)
МG+Mтр; (5-38)
при отключении
Ротр.= Рпруж.=![]() G- Ртр(5-39)
G- Ртр(5-39)
и соответственно
Мотр= Мпруж.=![]() МG-Mтр; (5-40)
МG-Mтр; (5-40)
где Рпруж— усилия, создаваемые отключающими и контактными пружинами;G — вес подвижной системы, в зависимости от конструкции вес может противодействовать ( + ) или помогать ( —) включению; где Ротр — силы трения.
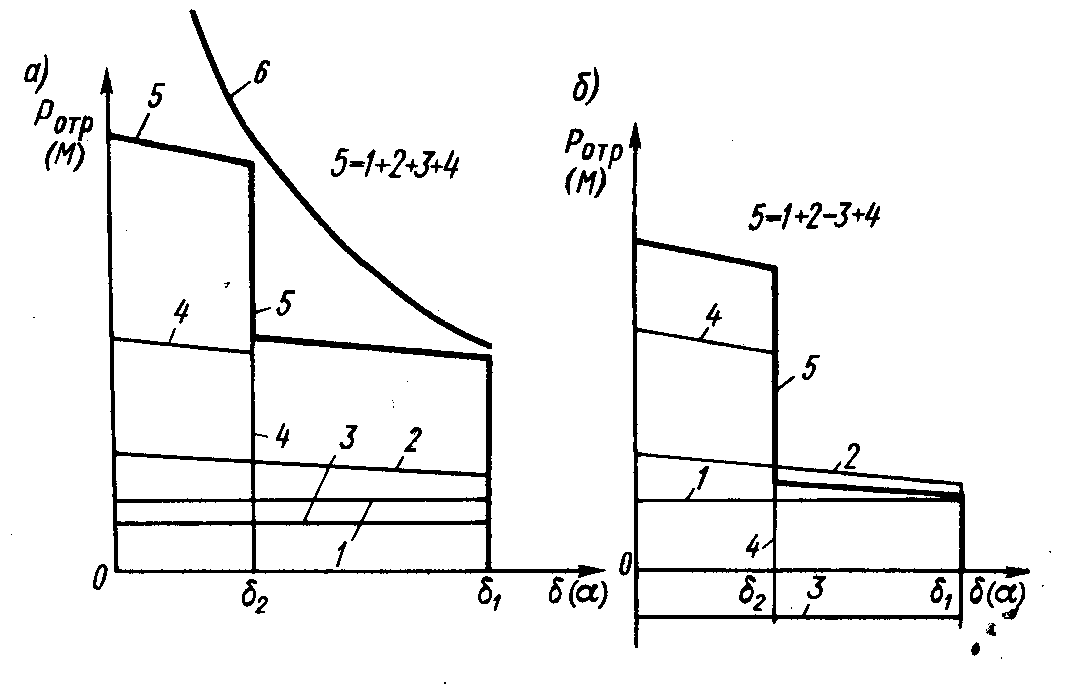
Рис. 5-8. Механические характеристики контактора: а – при включении; б – при отключении
В общем случае механическая характеристика
представляет собой ломаную линию (рис.
5-8). В качестве примера рассмотрим
построение механической характеристики
электромагнитного контактора при
включении и отключении. В точке
![]() 1действуют вес подвижной системы (кривая1), сила отключающей пружины (кривая
2) и силы трения (кривая 3). При движении
якоря Ротрвозрастает за счет
дополнительного сжатия отключающей
пружины. В точке
1действуют вес подвижной системы (кривая1), сила отключающей пружины (кривая
2) и силы трения (кривая 3). При движении
якоря Ротрвозрастает за счет
дополнительного сжатия отключающей
пружины. В точке![]() 2происходит соприкосновение контактов,
при этомРотр возрастает
сначала скачкообразно за счет начального
нажатия (кривая4), а затем плавно за
счет дополнительного сжатия контактных
пружин. Кривая 5 представляет собой
сумму кривых1—4 и является механической
характеристикой рассматриваемого
аппарата.
2происходит соприкосновение контактов,
при этомРотр возрастает
сначала скачкообразно за счет начального
нажатия (кривая4), а затем плавно за
счет дополнительного сжатия контактных
пружин. Кривая 5 представляет собой
сумму кривых1—4 и является механической
характеристикой рассматриваемого
аппарата.
Тяговая характеристика Р (кривая6) представляет собой зависимость
силы притяжения электромагнита от
зазора (соответственно зависимость
момента притяжения от угла поворота
якоря). Движение якоря начнется, когда
электромагнитная сила притяжения при![]() =
=![]() 1станет больше противодействующей. Для
обеспечения четкого и надежного включения
аппарата тяговая характеристика должна
лежать выше механической и соответствовать
ей. В зависимости от конструкции и рода
тока электромагнита могут быть получены
различного рода статические тяговые
характеристики, как это показано на
рис. 5-7.
1станет больше противодействующей. Для
обеспечения четкого и надежного включения
аппарата тяговая характеристика должна
лежать выше механической и соответствовать
ей. В зависимости от конструкции и рода
тока электромагнита могут быть получены
различного рода статические тяговые
характеристики, как это показано на
рис. 5-7.
Расположение катушки в магнитной системе относительно рабочего зазора в значительной степени определяет поток рассеяния. Таким образом, при данной
МДС значение силы притяжения электромагнита также зависит от расположения катушки в магнитной системе. Большая сила притяжения получается, когда рабочий зазор расположен внутри катушки. При этом катушка должна быть смещена в сторону якоря.