

Верба В.С. - Авиационные комплексы радиолокационного дозора и наведения (Системы мониторинга) - 2008
.pdfПРЕДИСЛОВИЕ
Монография «Авиационные комплексы радиолокационного дозора и на ведения. Состояние и тенденции развития» является очередной книгой из на учной серии «Системы мониторинга воздушного, космического пространства и земной поверхности». Это первая в нашей стране научная монография, посвя щенная современному состоянию и перспективам развития авиационных ком плексов радиолокационного дозора и наведения (АК РЛДН).
Возрастающие требования к точности и достоверности мониторинга ок ружающего пространства как в военной области, так и в интересах решения хо зяйственных задач обусловливают важность разработки специальных инфор мационно-управляющих систем авиационного базирования, способных опера тивно, круглогодично и круглосуточно, независимо от погодных условий, на больших удалениях и в широкой зоне наблюдения обеспечить получение све дений о функциональном состоянии интересующих районов и реализацию этих сведений в виде конкретных управляющих воздействий с привлечением боль шого числа исполнительных систем. К таким системам мониторинга и управ ления прежде всего относятся АК РЛДН.
Необходимость значительного повышения эффективности и снижения стои мости жизненного цикла предопределила разработку на основе АК РЛДН много функциональной информационно-управляющей системы, что предполагает рас ширение числа используемых информационных и управленческих режимов.
Требования снижения затрат при возрастающих сложности и объеме ре шаемых задач обусловили переход к интегрированным системам, в которых комплексирование осуществляется не только на уровне первичных измерите лей, но и на уровне функциональных систем.
Эти особенности приводят к существенному усложнению АК РЛДН ново го поколения. При этом в процессе создания таких систем основные возможно сти, показатели эффективности, режимы работы и принципы построения долж ны быть заложены уже на уровне разработки технического облика, предусмат ривающего продолжительность эффективной эксплуатации в течение несколь ких десятилетий.
В данной работе представлены концептуальные подходы к обоснованию облика АК РЛДН с учетом всего комплекса противоречащих друг другу опера тивно-тактических, экономических и технологических факторов. Изложены принципы построения и особенности функционирования существующих АК РЛДН, рассмотрены стратегические, оперативно-тактические, экономиче ские и технологические факторы, влияющие на облик АК РЛДН нового поко-
ления и на тенденции развития систем наведения и бортовой радиолокацион ной системы (РЛС).
Книга предназначена для инженеров и научных сотрудников, связанных с обслуживанием и проектированием сложных технических систем военного и гражданского назначения, а также для преподавателей, аспирантов и студентов соответствующих факультетов и вузов.
Монография написана на основе только открытой отечественной и зару бежной литературы (справочники, монографии, статьи, рекламные проспекты). Она состоит из предисловия, введения, двух частей и заключения.
Во введении дается краткий очерк истории разработки и применения АК РЛДН в нашей стране и за рубежом.
В состав п е р в о й ч а с т и входят пять глав.
В первой главе рассматриваются назначение АК РЛДН и варианты его применения при решении различных задач, показатели его эффективности, взаимодействие с потребителями информации, структура и характеристики комплекса.
Вторая и третья главы посвящены принципам построения бортовых РЛС АК РЛДН и используемым в них алгоритмам первичной и вторичной обработки.
Вчетвертой главе излагаются принципы обеспечения помехозащищенно сти РЛС АК РЛДН и вопросы технической реализации ее заданного уровня.
Впятой главе рассматриваются особенности построения и функциониро вания системы наведения.
В состав в т о р о й ч а с т и , посвященной облику АК РЛДН нового по коления, входят три главы.
Шестая глава посвящается влиянию стратегических, оперативнотактических, экономических и технологических факторов на облик АК РЛДН нового поколения.
В седьмой главе рассматриваются тенденции развития многофункцио нальных РЛС, входящих в состав АК РЛДН.
Восьмая глава посвящена тенденциям развития систем наведения АК РЛДН.
Замечания и предложения по улучшению содержания книги просьба при сылать в Издательство «Радиотехника» по адресу:
107031, г. Москва, К-31, ул. Кузнецкий мост, д. 20/6.
Телефон Издательства: (495) 625-92-41; телефон/факс: (495) 621-48-37.
Редакционная коллегия научной серии «Системы мониторинга воздушного, космиче ского пространства и земной поверхности»
ВВЕДЕНИЕ
В50-е годы XX в. задачи комплексов противовоздушной обороны (ПВО)
иуправления воздушным движением (УВД) по обнаружению, сопровождению самолетов и наведению на них истребителей были решены путем создания сплошного радиолокационного поля над территорией США, СССР, Европы и некоторых других стран. Однако оставались проблемы, которые требовали принципиально новых подходов для их разрешения.
Первая проблема заключалась в выполнении задач обнаружения, сопро вождения и распознавания воздушных целей, летящих на малых и предельномалых высотах. Дальность прямой видимости в этих случаях определяет воз можную дальность обнаружения целей и составляет 10...30 км, а с учетом по лета целей с огибанием и облетом неровностей рельефа земной поверхности она и того меньше.
Вторая проблема связана с задачами проведения воздушных операций в различных районах земного шара, где отсутствует радиолокационное поле на земных (корабельных) РЛС, которое может быть использовано для решения за дач контроля воздушного пространства. Особенно остро эта проблема стояла перед США, военная доктрина которых определяла необходимость военного присутствия во всех районах «американских интересов». Основной ударной силой при этом считалась военная авиация, ее носители - авианосные ударные соединения и военные базы, расположенные в различных странах практически на всех континентах.
Решить эти проблемы предполагалось, создав специальные авиационные комплексы дальнего радиолокационного обнаружения (ДРЛО). Мощные радио локационные станции, размещенные на борту самолета, летящего на высоте 9...12 км, могут обнаруживать низколетящие самолеты вплоть до радиогори зонта (400 км), а также надгоризонтные цели на еще больших дальностях. Ос новными боевыми задачами такой системы являются завоевание и поддержка превосходства в воздухе, управление ударной авиацией при действиях по на земным целям, контроль и управление авиационными группировками. Такая авиационная система, заказанная ВВС США в конце 60-х годов прошлого века, получила название AWACS (АВАКС) - система обнаружения и управления воздушного базирования. В СССР такой комплекс был назван АК РЛДН - авиационным комплексом радиолокационного дозора и наведения. Впервые такой комплекс на самолете Ту-126 с радиотехническим комплексом (РТК) «Лиана» был принят на вооружение в 1965 г. Он имел форму антенной систе мы в виде плоской антенной решетки во вращающемся обтекателе грибовид ной формы (рис. 1), ставшей впоследствии классической. Обтекатель устанав-
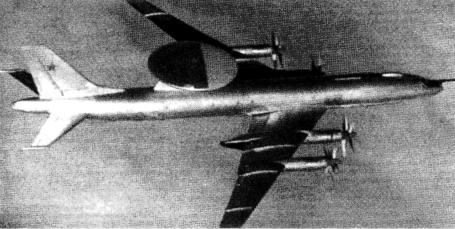
ливался на пилоне над фюзеляжем самолета. Такая конструкция и размещение антенны большого размера обеспечивали круговой обзор и большую дальность обнаружения самолетов, летящих над слабо отражающей поверхностью (мор ская, ледовая) в L-диапазоне волн работы радиолокатора. Всего было создано девять комплексов, которые использовались в основном в системе ПВО север ного и северо-западного направлений (со стороны Северного полюса).
Рис.1
К концу 60-х годов XX в. опыт использования комплексов «Лиана» пока зал их недостаточную эффективность при обнаружении и сопровождении ско ростных малозаметных воздушных целей, летящих на малых высотах у земной поверхности. В 1969 г. было принято Постановление Совета Министров СССР
о разработке радиотехнического комплекса «Шмель», который должен был об наруживать самолеты (бомбардировщики, истребители), крылатые ракеты и другие летательные аппараты на фоне земной поверхности всех типов на даль ности радиогоризонта (цели с большой эффективной площадью рассеивания), надгоризонтные цели на большой дальности и морские цели (корабли). Работа была поручена Московскому НИИ приборостроения (НПО «Вега») под руко водством главного конструктора В.П. Иванова. В состав РТК «Шмель» входи ли следующие системы:
трехкоординатная РЛС S-диапазона с пассивным каналом пеленгации ис точников излучения;
аппаратура съема и отображения информации; система активного «запроса-ответа» и передачи команд целеуказания ис
требителям-перехватчикам ; цифровой вычислительный комплекс БЦВМ А-50 (НИИ «Аргон») для ре
шения задач управления и наведения истребителей на воздушные цели. Число одновременно сопровождаемых целей - 50, одновременно наводимых - 10. В модернизированных комплексах «Шмель-М» и «Шмель-2» число сопровож даемых воздушных целей - соответственно 150 и 300;
система госопознавания; командная линия радиоуправления;
засекречивающая аппаратура связи (ЗАС);
комплекс связи (дальность радиосвязи KB - 2000 км, УКВ - 400 км), спут никовая радиосвязь;
телекодовая аппаратура; аппаратура документирования;
комплекс самообороны, содержащий системы активного и пассивного ра диоэлектронного противодействия.
Масса РТК «Шмель» составляла 20 т, что потребовало создания нового носителя (вместо Ту-126). Новый самолет создавался на базе серийного Ил-76, что существенно снижало стоимость жизненного цикла АК РЛДН.
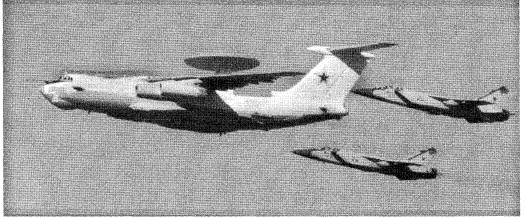
Создание самолета РЛДН А-50 было предписано ОКБ им. Г.М. Бериева под руководством А.К. Константинова. Первый полет самолет А-50 совершил в декабре 1978 г., а с августа 1979 г. начались его государственные испытания. Конструкция самолета А-50 (как и Ту-126) имеет грибовидный обтекатель ан тенны размером 10,5x2 м, расположенный на пилонах сзади крыла над фюзе ляжем и несколько ниже стабилизатора. Вид АК РЛДН А-50 с РТК «Шмель» в сопровождении пары МиГ-31 показан на рис. 2.
Рис. 2
Для улучшения аэродинамики и уменьшения мощности отраженного помехового сигнала РЛС от подстилающей поверхности, расположенной непо средственно под самолетом, сзади на обтекателях шасси поставлены треуголь ные горизонтальные аэродинамические гребни большой площади.
Длительность патрулирования комплекса РЛДН А-50 (без дозаправки) - 4 ч на удалении 1000 км от аэродрома базирования. Экипаж комплекса РЛДН А-50 состоял из двух летчиков, штурмана, бортинженера, командира расчета, трех операторов обнаружения, четырех штурманов наведения и двух связистов.
В 1984 г. началось строительство серийных А-50 с последующей опытной эксплуатацией в строевых частях. Официально на вооружение комплекс был принят в 1989 г. Основные этапы применения А-50:
крупные учения Вооруженных Сил СССР и стран Варшавского пакта (до 1990 г.);
контроль воздушного пространства Турции и Ирака со стороны Черного моря во время операции «Буря в пустыне» США (1991 г.);
контроль воздушного пространства Чечни (1994 и 1999-2000 гг.).
ВСША решение о разработке комплекса АВАКС было принято в 1967 г.
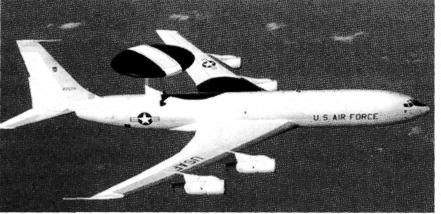
Вкачестве носителя был выбран пассажирский самолет Боинг 707-320С, над фюзеляжем которого был размещен обтекатель антенны, как и у комплекса А-50. На конкурсной основе проводили разработку и испытания двух типов РЛС фирм «Хьюз» и «Вестингауз». В 1977 г. началось строительство серийных комплексов с РЛС APY-1 («Вестингауз»), получивших обозначение Е-ЗА (мо дернизированные Е-ЗВ и Е-ЗС). Вид самолета дальнего радиолокационного об наружения (ДРЛО) Е-ЗС «Сентри» показан на рис. 3. К 1984 г. было построено 34 комплекса, каждый стоимостью 300 млн долл. в ценах 80-х годов прошлого века. На тот период тактико-технические характеристики и функциональные возможности А-50 и Е-ЗА были примерно одинаковыми.
Рис.3
Одновременно с комплексом Е-ЗА в Великобритании разрабатывался комплекс AEW («Нимрод»). В этом комплексе антенны РЛС размещались в но совой и хвостовой частях самолета. По характеристикам и срокам готовности он уступал Е-ЗА. Поэтому в 1980 г. страны НАТО приняли решение о создании общенатовской группы (18 Е-ЗА с модернизированной РЛС APY-2) и британ ской эскадрильи (семь Е-ЗД). К 1988 г. обе группы были полностью боеготовы. Большая часть Е-ЗА НАТО постоянно базируется в Турции, Греции, Италии и Норвегии. Кроме того, 33 комплекса имеют ВВС США, 5 - Саудовская Аравия и 4 - Франция.

Комплексы АВАКС, кроме регулярного участия в учениях, активно ис пользовались в вооруженных конфликтах. Так, в ходе операции «Буря в пусты не» в 1991 г. в Ираке самолеты Е-ЗА выполнили более 400 вылетов с общим временем боевого дежурства 5000 ч. В Югославии сделано 500 вылетов с вре менем дежурства 4800 ч для проведения координации и слежения при наступа тельных и оборонительных операциях, поиска самолетов противника, опозна вания «свой-чужой». Осуществлялось также управление заправщиками, барра жировавшими в Адриатике.
Бурное развитие радиоэлектроники и прежде всего микроэлектроники по зволило проводить непрерывную модернизацию существующих комплексов Е-3 и создавать комплексы на новых принципах действия.
Основные цели модернизации и создания новых комплексов следующие: значительное повышение тактико-технических характеристик (ТТХ) ком
плексов (дальности обнаружения и сопровождения малозаметных высокоско ростных и маневрирующих целей, разрешение целей в группе по дальности и азимуту, точности измерения координат, особенно высоты полета целей);
повышение оперативной гибкости (новые режимы работы); увеличение зоны ответственности (объема зоны, числа одновременно об
служиваемых целей и времени барражирования); повышение помехозащищенности и боевой устойчивости комплексов;
обеспечение высокой надежности и ремонтопригодности; снижение стоимости жизненного цикла (разработки, боевого применения
и эксплуатации).
Примером модернизации служит комплекс Е-ЗД, поставляемый в Японию. Для него используется новый самолет Боинг 767-27С (рис. 4), который имеет в два раза больший объем, чем Боинг 707. Летный экипаж всего два человека, в то время как число операторов достигло 22. Время полета - 1 3 ч (без дозаправ-
Рис. 4

ки). Новый, в два раза более производительный, компьютер СС-2Е обеспечива ет возможность слежения за 2000 целями. Установлена также модернизирован ная РЛС APY-2 с лучшими характеристиками по обнаружению малозаметных целей.
Все вновь разрабатываемые РЛС комплексов используют вместо волно- водно-щелевой антенной решетки с механическим сканированием неподвиж ные активные фазированные антенные решетки (АФАР) с электронным скани рованием. Такая конструкция позволяет достичь большинства целей модерни зации, одновременно обеспечивая создание новых комплексов.
Существующие опытные и разрабатываемые РЛС имеют плоские АФАР, располагаемые на самолете различным образом. Так, РЛС PS-890 шведской фирмы «Эриксон» имеет плоскую двухстороннюю АФАР длиной 8 м, распола гаемую на пилонах сверху вдоль фюзеляжа самолета SAAB340B комплекса S100 В «Аргус» (рис. 5).
Рис.5
Каждая сторона ΑΦ АР имеет 192 твердотельных приемопередающих мо дуля S-диапазона и обеспечивает круговой обзор с несколько худшими харак теристиками в переднем и заднем секторах. Аналогично расположена АФАР фирмы «Грумман» на самолете Боинг-737-80 комплекса 737/MESA (рис. 6). В обтекателе размером 10,7x1,2x2,4 м установлена антенна РЛС MESA (много функциональная электронно-сканирующая антенна) L-диапазона.
Французская фирма «Райтеон» разработала комплекс А-310 AEW с РЛС ESA системы «Фалкон» израильской фирмы IAIELTO. Три АФАР L-диапазона расположены в виде равностороннего треугольника в невращающемся обтека теле грибовидной формы на пилонах над фюзеляжем самолета A310-300 (рис. 7). Такое расположение АФАР позволяет осуществлять круговой и про граммируемый обзор в любом секторе.
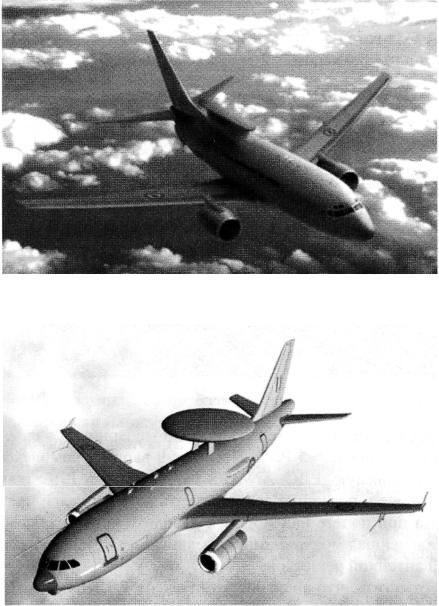
Рис.6
Рис.7
Рассматриваются также варианты расположения нескольких (до шести) АФАР системы «Фалкон» на боковых поверхностях фюзеляжа, крыльях и хво стовом оперении.
Для обеспечения информацией о воздушной и надводной обстановке авианосных ударных соединений, действующих далеко в отрыве от мест бази рования комплексов АВАКС Е-ЗА, необходим был самолет корабельного бази рования. Самолет комплекса Е-ЗА по массе и габаритам не мог быть размещен на авианосцах.
В 1957 г. фирма «Грумман» получила заказ на создание комплекса сис темы управления истребительной авиацией, ударными авиагруппами и силами

ПВО над морем, обнаружения и распознавания кораблей, координации поис ково-спасательных операций на море и решения других задач. Комплекс «Хокай» Е-2А был готов в 1960 г. Как и комплекс Е-ЗА, он имел дисковидный обтекатель антенны размером 7,2 м, расположенный на пилоне над фюзеля жем (рис. 8).
Рис.8
Комплекс Е-2А неоднократно полностью модернизировался. Была произ ведена смена пяти поколений РЛС. Последний вариант комплекса Е-2С имеет импульсно-доплеровскую РЛС AN/APS-145. Работает РЛС (как и ранее, в UHF) в Р-диапазоне и позволяет сопровождать до 2000 целей на дальностях'до радиогоризонта при полете над морем и наводить истребители на 40 воздуш ных целей. Дальнейшая модернизация предполагает установку РЛС с активной фазированной антенной решеткой.
Следует отметить, что значение комплексов РЛДН (АВАКС) как инфор мационных систем непрерывно возрастает. Ни одна крупная операция как в процессе учений, так и в период ведения боевых действий не осуществляется без таких комплексов.
Бурный рост возможностей радио- и микроэлектроники позволяет созда вать комплексы типа АВАКС с высокими ТТХ и одновременным снижением стоимости жизненного цикла. Это значительно увеличивает интерес и возмож ности оснащения такими комплексами ВВС многих стран.
Дальнейшие исследования и разработки в этой области направлены на расширение функций по контролю не только воздушной и надводной, но и на земной обстановки (программа Е-10А США).
Разрабатываемый по программе Е-10А комплекс МС2А будет способен выполнять функции комплексов АВАКС (Е-ЗВ) и ударно-разведывательных Джистарс (Е-8С).