

3 Моделирование объекта в
Объект В,согласно индивидуального задания , задан произведением двух передаточных функций типовых динамических звеньев первого порядка вида:
W(p)= W8*W4 (3.1)
где, в свою очередь, передаточные функции W5(p) и W8(p) представлены ниже в общем виде :

 (3.2)
(3.2)
Для формирования структурной схемы объекта, представляющего собой типовое соединение звеньев, запишем параметры их передаточных функций – коэффициенты усиления и постоянные времени :
K = ; T1= с; T2= с; T3= с.
С помощью блоков Transfer Fcn пакета визуального моделирования Simulink была разработана структурная схема объекта В, представленная на рисунке 3.1. Для исследования объекта В, заданного произведением передаточных функций, в качестве входного воздействия выбрана типовая функция Хевисайда (функция включения).
При моделировании объекта В и входящих в его состав передаточных функций были получены графики переходных характеристик отдельных передаточных функций (см. рисунки 3.2 и 3.3 соответственно), и график переходной функции объекта В, представленный на рисунке 3.4.

Рисунок 3.1– Структурная схема модели объекта B
Рисунок 3.1– Структурная схема модели объекта B
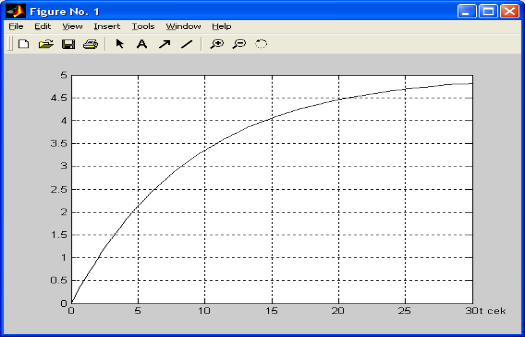
Рисунок 3.2 – Переходная характеристика звена W8(p)

Рисунок 3.3 – Переходная характеристика звена W4(p)

Рисунок 3.4 – Переходная характеристика объекта В
4 Моделирование системы
Общая структуры системы, согласно варианта задания, представляет собой параллельное соединение объектов А и В, согласно рисунка 4.1.

Рисунок 4.1 – Структурная схема модели системы при параллельном
подключении объектов
Она представлена паследовательным соединением объекта А, заданного дифференциальным уравнением 3-ого порядка и объекта В, заданного суммой передаточных функций W8(p) и W4(p).
В качестве внешнего сигнала, подаваемого последовательно на объект А и объект В, выбрана типовая функция Хевисайда (функция включения). Структурная схема синтезированной системы представлена на рисунке 4.2.
Осуществлено моделирование синтезированной системы. В результате получен график выходной функции, представляющей собой реакцию динамической системы на типовое внешнее воздействие – переходную характеристику. Ее вид представлен на рисунке 4.3. Как видно из рисунка 4.3, временная характеристика синтезированной системы носит расходящийся характер.

Рисунок
4.2 – Структурная схема синтезированной
системы

Рисунок 4.3 – Переходная характеристика синтезированной системы
25