

ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по выполнению курсовой работы
по дисциплине
"ГИДРАВЛИКА
И
ГИДРОПНЕВМОПРИВОД"
АЛЧЕВСК–2006
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ПО ВЫПОЛНЕНИЮ КУРСОВОЙ РАБОТЫ
ПО ДИСЦИПЛИНЕ
«ГИДРАВЛИКА И ГИДРОПНЕВМОПРИВОД»
(для студентов специальности 7.090202 и 7.090209)
Составитель Николай Федотович Брожко
Алчевск – 2006
ДОНБАССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению курсовой работы
по дисциплинам
"ГИДРАВЛИКА И ГИДРОПНЕВМОПРИВОД",
"ГИДРО-ПНЕВМОАВТОМАТИКА"
(для студентов специальностей 7.090202 и 7.090209)
Утверждено
на заседании кафедры
прикладной гидромеханики
Протокол №
Алчевск
ДонГТУ
2
УДК 62-82: 681.587.35
Методические указания по выполнению курсовой работы по дисциплинам "Гидравлика и гидропривод" и "Гидро-пневмоавтоматика" для студентов специальностей 7.090202 и 7.090209. Сост. Н.Ф. Брожко.- Алчевск: ДонГТУ, 2006. - 43 с.
Приведены структура контрольной работы, разработка схемы, выбор оборудования гидропривода, расчет статической характеристики электрогидравлического следящего привода.
Выполнение работы поможет студентам освоить один из разделов комплекса средств автоматизации технологического оборудования в машиностроении и привьет им навыки по основам расчета и проектирования гидравлических приводов исполнительных органов металлорежущих станков
Составитель Н.Ф.Брожко, к.т.н., доц.
О
1 Общие указания
В современных системах автоматического регулирования и управления широко применяют электрогидравлические следящие приводы с дроссельным регулированием.
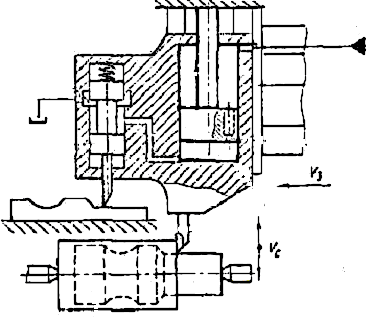
Управляющая часть таких приводов состоит из электрических устройств, которые воспринимают задающее воздействие от чувствительных элементов или вычислительных устройств, сравнивают их с сигналами обратной связи и вырабатывают сигналы управления силовой частью. В силовую часть входят исполнительный двигатель и регулирующее устройство. Исполнительным двигателем может служить гидродвигатель с линейным перемещением выходного звена. Для уменьшения мощности, потребляемой управляющей частью, в регулирующее устройство, кроме распределителя потока жидкости, обычно включают промежуточные гидроусилители. Сигналы обратной связи от выходного звена исполнительного двигателя создаются с помощью датчиков обратной связи. Взаимосвязь перечисленных устройств для электрогидравлических приводов может быть представлена общей схемой, показанной на рис. 1.
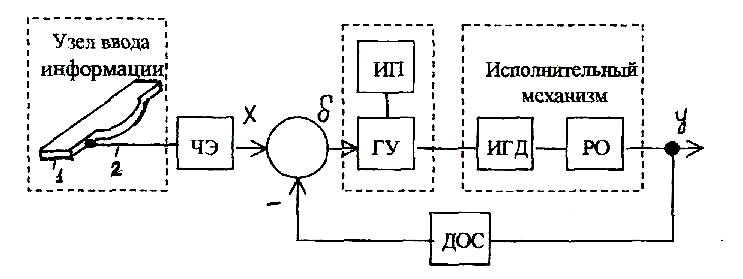
Рисунок 1–Функциональная схема электрогидравлического следящего привода
Чувствительный элемент (ЧЭ) через щуп (2) получает информацию от копира (1) о величине (х) необходимого перемещения и передает ее в датчик рассогласования (4). Сюда по цепи обратной связи поступает выходная величина (у) (например, перемещение рабочего органа). Происходит сравнение входной и выходной величин, в результате чего формируется сигнал рассогласования δ = (х–у), поступающий на вход гидроусилителя (ГУ). Очевидно, что следящая система работает только при наличии сигнала рассогласования. Узел ввода информации содержит задающее устройство, которое при помощи щупа (2) и чувствительного элемента (ЧЭ) передает на вход гидроусилителя (ГУ) управляющий сигнал.
Конструктивно гидравлический следящий привод (ГСП) состоит из трех основных узлов:
ввода информации;
гидроусилителя;
исполнительного механизма.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНОГО ЗАДАНИЯ
Контрольная работа представлена в виде единой комплексной задачи, для выполнения которой требуются знания многих разделов курса «Гидравлика и гидро-пневмопривод».
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ И ВЫБОР ВАРИАНТА
Контрольная работа состоит из двух взаимосвязанных частей:
разработка схемы, выбор оборудования и аппаратуры гидропривода;
по разработанной схеме расчет статической характеристики электрогидравлического следящего привода (ЭГСП).
В первой части следует разработать принципиальную гидравлическую схему гидропривода с дроссельным регулированием. В качестве гидродвигателя (ГД) использовать гидроцилиндр, управляемый золотниковым гидрораспределителем.
При расчетах обеспечить:
а) максимальное заданное усилие G, развиваемое на штоке гидроцилиндра;
б) постоянную скорость движения штока V, выбрать соответствующее гидравлическое оборудование и аппаратуру.
Для обеспечения постоянной скорости движения штока гидроцилиндра при изменениях G применить регулятор потока.
Во второй части работы по заданной схеме ЭГСП рассчитать его статическую характеристику, используя параметры гидроцилиндра и системы питания, полученные при выполнении первой части курсовой работы. Типоразмер электрогидравлического усилителя мощности (ЭГУ) выбрать в соответствии с подачей насоса Qн. Варианты исходных данных приведены в табл. 1. Вариант задания выдается отдельно преподавателем.
Таблица 1 – Варианты исходных данных
Вари- ант |
Усилие на штоке |
Скорость потока V, м/с |
Приведенная длина трубо- провода L, м |
Перекрытие окон на золотнике |
|||
Толка- ющее |
Тяну- щее |
G, H |
|||||
ΔН, мм |
ΔС, мм |
||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
01 |
+ |
|
4800 |
0,50 |
12 |
0,00 |
0,05 |
02 |
+ |
|
6500 |
0,40 |
10 |
0,01 |
0,04 |
03 |
+ |
|
8800 |
0,37 |
14 |
0,02 |
0,03 |
04 |
|
+ |
6400 |
0,50 |
11 |
0,03 |
0,02 |
05 |
|
+ |
8800 |
0,36 |
13 |
0,04 |
0,01 |
06 |
|
+ |
10400 |
0,44 |
12 |
0,05 |
0,00 |
07 |
+ |
|
11000 |
0,25 |
12 |
0,06 |
0,01 |
08 |
+ |
|
18000 |
0,18 |
10 |
0,07 |
0,02 |
09 |
+ |
|
23800 |
0,22 |
9 |
0,08 |
0,03 |
10 |
|
+ |
21000 |
0,24 |
10 |
0,09 |
0,04 |
11 |
|
+ |
35800 |
0,29 |
11 |
0,1 |
0,05 |
12 |
|
+ |
62900 |
0,17 |
9 |
0,1 |
0,04 |
13 |
+ |
|
45000 |
0,12 |
8 |
0,1 |
0.03 |
14 |
+ |
|
73000 |
0,14 |
7 |
0,1 |
0,02 |
15 |
+ |
|
120000 |
0,09 |
10 |
0,1 |
0,01 |
16 |
|
+ |
24000 |
0,34 |
9 |
0,1 |
0,00 |
17 |
|
+ |
30000 |
0,56 |
10 |
0,09 |
0,01 |
18 |
|
+ |
44400 |
0,38 |
8 |
0,08 |
0,02 |
19 |
+ |
|
48000 |
0,17 |
9 |
0,07 |
0,03 |
20 |
+ |
|
59000 |
0,28 |
10 |
0,06 |
0,04 |
21 |
+ |
|
116000 |
0,14 |
7 |
0,05 |
0,05 |
22 |
|
+ |
63000 |
0,3 |
13 |
0,04 |
0,06 |
Продолжение таблицы 1 |
|||||||
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
23 |
|
+ |
10000 |
0,47 |
12 |
0,03 |
0,07 |
24 |
|
+ |
13000 |
0,48 |
И |
0,02 |
0,08 |
25 |
+ |
|
8200 |
0,22 |
13 |
0,01 |
0,09 |
26 |
+ |
|
13000 |
0,36 |
12 |
0,00 |
0,1 |
27 |
+ |
|
18000 |
0,35 |
10 |
0,03 |
0,02 |
28 |
|
+ |
25000 |
0,29 |
10 |
0,04 |
0,01 |
29 |
|
+ |
40000 |
0,24 |
9 |
0,00 |
0.05 |
30 |
|
+ |
44500 |
0,29 |
10 |
0,01 |
0.04 |
31 |
+ |
|
34000 |
0,22 |
8 |
0,02 |
0,03 |
32 |
+ |
|
52000 |
0,18 |
8 |
0,03 |
0,02 |
33 |
+ |
|
60500 |
0,22 |
7 |
0,04 |
0,01 |
34 |
|
+ |
70000 |
0,23 |
8 |
0,05 |
0,00 |
35 |
|
+ |
86000 |
0.3 |
7 |
0,06 |
0,01 |
36 |
|
+ |
25000 |
0,37 |
10 |
0,07 |
0,02 |
37 |
+ |
|
92000 |
0,17 |
8 |
0,08 |
0,03 |
38 |
+ |
|
146000 |
0,18 |
7 |
0,09 |
0,04 |
39 |
+ |
|
120000 |
0,09 |
9 |
0,1 |
0,05 |
40 |
|
+ |
370О0 |
0,36 |
11 |
0,1 |
0,04 |
41 |
|
+ |
16500 |
0,4 |
14 |
0,1 |
0,03 |
42 |
|
+ |
58800 |
0,35 |
13 |
0,1 |
0,02 |
43 |
+ |
|
34000 |
0,28 |
14 |
0,1 |
0,02 |
44 |
+ |
|
60500 |
0.22 |
13 |
0,1 |
0,03 |
45 |
+ |
|
92000 |
0,87 |
11 |
0,09 |
0,04 |
46 |
|
+ |
75000 |
0,07 |
13 |
0,06 |
0,03 |
47 |
|
+ |
26000 |
0,31 |
14 |
0,09 |
0,05 |
48 |
|
+ |
130000 |
0,09 |
11 |
0,1 |
0,04 |
49 |
+ |
|
38000 |
0,19 |
12 |
0,08 |
0,03 |
50 |
+ |
|
95000 |
0,36 |
9 |
0,05 |
0,00 |
51 |
+ |
|
68500 |
0,28 |
10 |
0,01 |
0,06 |
52 |
|
+ |
11900 |
0,18 |
15 |
0,02 |
0,08 |
53 |
|
+ |
9800 |
0,21 |
13 |
0,03 |
0,07 |
54 |
|
+ |
145000 |
0,08 |
8 |
0,1 |
0,6 |
55 |
+ |
|
90000 |
0,18 |
10 |
0,01 |
0,09 |
56 |
+ |
|
57000 |
0,22 |
11 |
0,02 |
0,04 |
57 |
+ |
|
22800 |
0,23 |
9 |
0,07 |
0,02 |
58 |
|
+ |
14500 |
0,27 |
7 |
0,09 |
0,04 |
59 |
|
+ |
89500 |
0,17 |
12 |
0,03 |
0,02 |
60 |
|
+ |
115000 |
0,21 |
9 |
0,1 |
0,03 |