

3. Описание лабораторной установки
Основными элементами лабораторной установки являются три механически связанных микромашины постоянного тока с возбуждением от постоянных магнитов М1 – М3 и тиристорный преобразователь ТП – рис. 1.4. Якорные выводы машин и выходные выводы ТП соединены с гнездами на лицевой панели стенда.
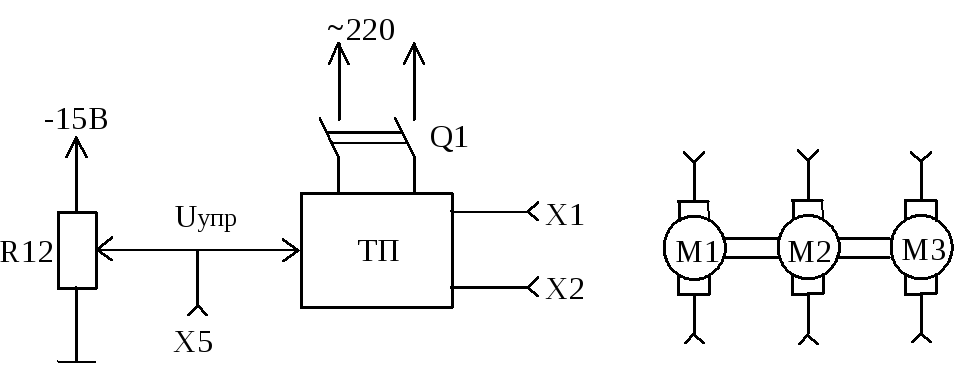
Рис.1.4. Элементы лабораторной установки
Тиристорный преобразователь осуществляет преобразование переменного напряжения на энергетическом входе в постоянное напряжение регулируемой величины на выходе, то есть является управляемым выпрямителем.
Напряжение
на вход ТП подается через переключатель
Q1. Выходные выводы ТП
соединены с гнездами Х1, Х2. Регулирование
выходного напряжения осуществляется
изменением напряжения управления
![]() ,
снимаемого с резистора R12.
,
снимаемого с резистора R12.
Для исследования статических характеристик собирается с использованием перемычек схема, приведенная на рис. 1.5.
И
8 7

Рис. 1.5. Схема для снятия статических характеристик
Машина М2 работает в генераторном режиме и служит для создания нагрузки на валу исследуемого двигателя. Регулирование нагрузки осуществляется изменением сопротивления реостата R1.
Машина
М3 используется в качестве тахогенератора
– датчика информации о скорости. В
соответствии с (1.1) ЭДС якоря МПТ
пропорциональна
![]() ,
что позволяет, измерив напряжение якоря
тахогенератора
,
что позволяет, измерив напряжение якоря
тахогенератора
![]() ,
определить угловую скорость.
,
определить угловую скорость.
4. Порядок выполнения работы
4.1. Подготовить для заполнения табл. 1.
Таблица 1
|
Заданное напряжение |
Опытные данные |
Расчетные данные |
||||||
|
|
|
|
рад/с |
|
|
|
|
η, % |
|
|
|
|
|
|
|
|
|
|
4.2. Получить у преподавателя параметры машин и значения напряжения якоря U исследуемого двигателя для снятия искусственных характеристик.
4.3. Получить экспериментальные данные для построения естественной электромеханической характеристики и рабочих характеристик исследуемого ДПТ.
Изменяя сопротивление R1 и поддерживая номинальное напряжение якоря исследуемого двигателя, заполнить колонку опытных данных табл. 1. Ток I исследуемого двигателя изменять от минимального значения, обеспечиваемого при максимуме сопротивления R1, до значений порядка 1,2 Iном.
4.4. Получить экспериментальные данные для построения искусственных электромеханических характеристик при изменении напряжения якоря.
Повторить предыдущий опыт, поддерживая постоянство напряжений якоря, значения которых получены у преподавателя.
4.5. Получить экспериментальные данные для построения регулировочной характеристики – зависимости угловой скорости от напряжения якоря.
Характеристику получить для режима холостого хода нагрузочной машины. При разомкнутой цепи машины М2 измерять напряжение тахогенератора, изменяя напряжение якоря машины М1.
4.6. Получить расчетные данные для табл. 1.
При их вычислении использовать формулы:
 (1.8)
(1.8)
г
10 9![]() – коэффициент передачи тахогенератора;
М – электромагнитный момент двигателя;
– коэффициент передачи тахогенератора;
М – электромагнитный момент двигателя;
![]() - произведение конструктивного
коэффициента
- произведение конструктивного
коэффициента
![]() машины М1 на ее магнитный поток;
машины М1 на ее магнитный поток;
![]() – момент на валу М1;
– момент на валу М1;
![]() – момент холостого хода М1;
– момент холостого хода М1;
![]() – потребляемая мощность;
– потребляемая мощность;
![]() – полезная мощность М1;
– полезная мощность М1;
![]() – коэффициент полезного действия.
– коэффициент полезного действия.
Коэффициент
![]() исследуемого двигателя определяется
по формуле:
исследуемого двигателя определяется
по формуле:
![]() ,
(1.9)
,
(1.9)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() – номинальные данные двигателя М1.
– номинальные данные двигателя М1.
Значение
![]() рассчитывают для всех опытов, остальные
данные – только для случая работы
двигателя М1 при номинальном напряжении
якоря.
рассчитывают для всех опытов, остальные
данные – только для случая работы
двигателя М1 при номинальном напряжении
якоря.
4.7. По опытным и расчетным данным построить рабочие характеристики, естественную и искусственные электромеханические характеристики исследуемого двигателя, регулировочную характеристику.