

3.4.5. Примеры выполнения принципиальных электрических схем
Автоматизация большинства объектов неразрывно связана с управлением технологическими механизмами с электроприводами. Такими механизмами являются насосы, вентиляторы, задвижки, клапаны и т.п., а в качестве электроприводов используются в основном реверсивные и нереверсивные асинхронные электродвигатели с короткозамкнутым ротором. Схемы управления обычно строятся на базе релейно-контактных элементов.
3.4.5.1. Схема управления задвижкой с электроприводом. Как
правило, схема управления электроприводом предусматривает местное, дистанционное и автоматическое управление.
Местное управление осуществляется оператором с помощью органов управления, например, кнопочных постов, расположенных в непосредственной близости от механизма. Дистанционное управление осуществляется со щитов и пультов объекта автоматизации. При этом технологические механизмы находятся вне поля зрения оператора и их положение контролируется по сигналам "Включено" - "Отключено", "Закрыто"- "Открыто". Автоматическое управление обеспечивается с помощью ТСА (регуляторов или сигнализаторов технологических параметров), а также различных программных устройств, предусматривающих автоматическое управление электроприводом с соблюдением заданных функциональных зависимостей (одновременности или определенной последовательности включения).
Вид управления электроприводом выбирается с помощью переключателя цепей (переключателя вида управления).
На рис.3.15 показана схема управления реверсивным асинхронным двигателем электропривода задвижки.
Практически все запорные устройства оснащены муфтами предельного крутящего момента и конечными выключателями. Контакты муфт предельного крутящего момента, обычно обозначаемые в схемах ВМО и ВМЗ, служат для отключения электроприводов при достижении предельного значения крутящего момента в случае несрабатывания из-за неправильной регулировки конечных выключателей, а также при застопоривании запорного устройства в промежуточном положении.
Общие принципы работы схемы следующие:
I) при подаче команды на открытие или закрытие запорного устройства срабатывает соответствующий магнитный пускатель КМ1 или КМ2, который включает электропривод. Обмотка магнитного пускателя после снятия
управляющего
импульса продолжает получать питание
через собственный замыкающий контакт;
2) схемы управления имеют нулевую защиту;
3) при достижении запорным устройством положения "Открыто" ("Закрыто") конечный выключатель SQ1 (SQ2) разрывает цепь питания КМ1 (КМ2), останавливая электропривод; контакты конечных выключателей служат также для запрещения ошибочной подачи команды на закрытие (открытие) полностью закрытого (открытого) запорного устройства;
-
для исключения одновременного включения обмоток КМ1 и КМ2 используется электрическая блокировка: в цепь питания обмотки КМ1 введен размыкающий блок-контакт КМ2 и наоборот;
-
реверс во время хода запорного устройства возможен только после операции "Стоп", при этом обеспечивается возможность останова устройства в любом промежуточном положении и возможность посылки последующей команды на открытие или закрытие;
6) предусмотрена блокировка, исключающая возможность одновременного управления электроприводом из нескольких мест.
На рис.3.16 показана диаграмма работы конечных выключателей (а) и таблица переключений контактов переключателя SA (б).
Как следует из диаграммы, когда задвижка закрыта, контакты SQ1 и SQ2 замкнуты, a SQ3 и SQ4 разомкнуты; при этом горит лампа HL1, сигнализирующая о том, что задвижка закрыта. Для открытия задвижки включается пускатель КМ2 (кнопкой SB4 при местном управлении и SB3 - при дистанционном). Как только задвижка начинает открываться, SQ3 и SQ4 размыкаются. Это необходимо для дополнительного отключения цепей КМ1, чтобы его нельзя было включить в то время, когда КМ2 включено. При достижении задвижкой положения "Открыто" конечные выключатели SQ1 и SQ2 размыкаются, в результате чего КМ2 отпускает и отключает двигатель М, задвижка останавливается, лампа HL1 гаснет.
3.4.5.2. Схема управления нереверсивными электроприводами дренажных насосов с автоматическым вводом резерва.
Дренажные насосы - рабочий и резервный - предназначены для откачки грунтовых и ливневых вод из дренажного колодца-зумпфа.
Как видно из схемы (рис.3.17), предусматривается местное и автоматическое управление насосами. Автоматическое управление осуществляется по сигналам KV1 - реле нижнего уровня, KV2 - реле верхнего уровня и KV3 - реле верхнего аварийного уровня. Когда уровень в зумпфе повышается до отметки, при которой срабатывает реле KV2, насос включается. При снижении уровня до нормального реле KV1 отпускает, и насос останавливается. Если один насос не справляется с откачкой и уровень продолжает повышаться, то срабатывает реле KV3 и включает второй насос. При снижении уровня до нормального оба насоса отключаются. Для равномерной эксплуатации насосов предусмотрена возможность изменения







контакта
3Q1
SQ2
S03
3Q4
Контакты
J&T
WZ
-&Г
^адв ижка
Закрыта
Т
т
Контакт замкнут
КоНТаКТ
разомкнут
а)
|
УП5311-С225 |
||||||||
|
№ секции |
№ контакта |
Положение рукоятки |
||||||
|
+45 |
0 |
-45 |
||||||
|
Л |
П |
Л |
п |
Л |
П |
Л |
п |
|
|
I |
1 |
2 |
|
— |
— |
— |
— |
|
|
II |
|
4 |
|
— |
— |
— |
— |
|
|
Режим работы |
Местный |
Отключено |
Дистанционный |
|||||
|
Условное обозначение |
М |
О |
д |
|||||
О)
Рис.3.16. Диаграмма работы конечных выключателей (а) и таблица переключений контактов переключателей (б) к схеме на рис.3.15
очередности включения насосов при автоматическом управлении (переключателем SA1).
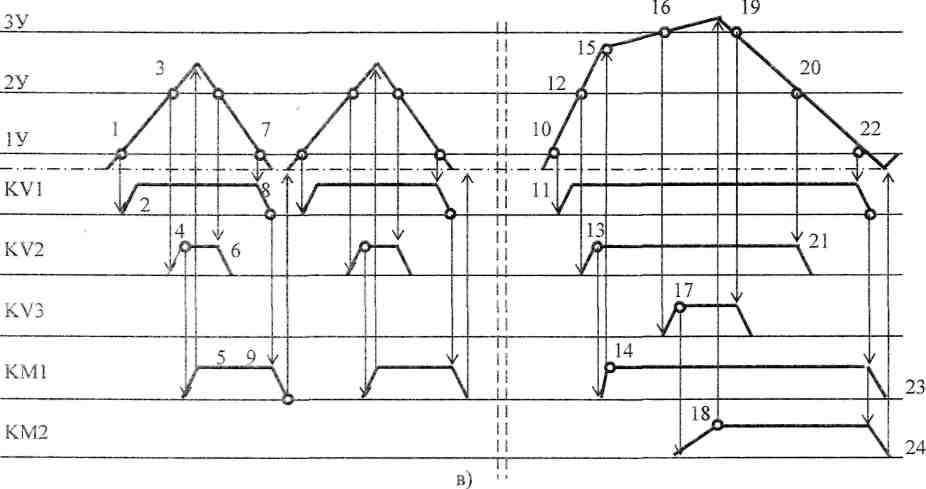
На вспомогательной схеме изображен зумпф с отметками: 1У - нижний уровень, 2У - верхний уровень, ЗУ - верхний аварийный уровень. До этих
я
уровней опущены электроды датчика уровня Э1-ЭЗ, соединенные соответственно с реле KV1-KV3.
На диаграмме линии 1У-ЗУ соответствуют трем уровням, а штрих-пунктирная линия - опорожненному зумпфу.
Зумпф начинает заполняться, вода в нем достигает уровня 1У (точка 1 на диаграмме). Замыкается цепь реле KV1, оно срабатывает (точка 2) и замыкает контакт в цепи №1, но КМ1 не включается, т.к. последовательно с контактом реле KV1 включен замыкающий контакт КМ1. При достижении уровня 2У (точка 3) включается KV3 (точка 4) и по цепи №2 включает КМ1 (точка 5): начинается откачка. Вскоре KV2 отпускает (точка 6), но насос не отключается, пока уровень не снизится до нормального (точка 7) и не отпустит KV1 (точка 8), которое отключит КМ1 (точка 9). Через некоторое время, после накопления воды в зумпфе, все повторяется в той же последовательности.
Если заполнение зумпфа идет более интенсивно и один насос не справляется с откачкой, при уровне ЗУ (точка 16) срабатывает KV3 (точка 17) и включает КМ2 (точка 18); начинает работать второй насос. Откачка продолжается, пока не отпустит KV1 (точка 22) и не отключит оба пускателя (точки 23 и 24); оба насоса останавливаются.
3.5. Электрические схемы контроля и сигнализации
Кроме параметров, требующих измерения, системы технологического контроля имеют большое число параметров (или состояний производственных механизмов), о которых для нормального ведения технологического процесса - оператору достаточна только двухпозиционная информация (параметр в норме - параметр вышел за пределы нормы, механизм включен - механизм отключен и т.п.). Контроль таких параметров осуществляется с помощью схем сигнализации. Обычно в них применяются релейно-контактные элементы со световой и звуковой сигнализацией. Световой сигнал может быть воспроизведен ровным или мигающим светом, свечением ламп неполным накалом, а звуковой с помощью звонков, гудков и т.п. Иногда информация о срабатывании защиты или автоматики может быть выполнена с помощью специальных указательных реле - блинкеров.
По назначению схемы сигнализации делят на следующие группы:
1) схемы сигнализации положения (состояния) - для информации о состоянии технологического оборудования по типу "открыто" - "закрыто", "включено" - "выключено" и т.д.;
2) схемы технологической сигнализации, дающие информацию о значении таких параметров, как температура, давление, расход и т.д.;
3) схемы командной сигнализации, позволяющие передавать различные указания из одного пункта управления в другой с помощью световых или звуковых сигналов.
FU
1 SB1
2
SB2
,
KM2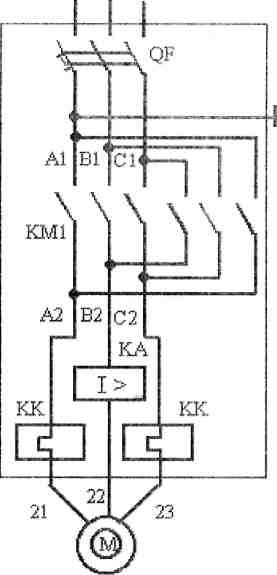
ABC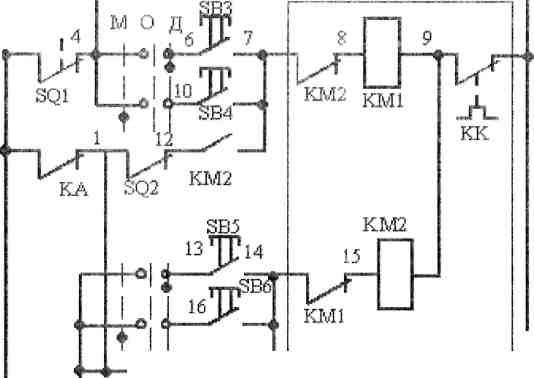
В ex ему упр авления компрессором
17 ^ 18
SQ3
HL1 Rl
'"*&0*~—~i t"
f.A KM1
"| 18 й?19
20
KV
Питание 380/220 В
Сигнал 'Закрыто"
Пускатель открыть
Местное и
дистанционное
управление
Пускатель закрыть
Местное и
дистанционное
управление
Сигнал 'Открыто"
Промежуточное реле
Рис.3.15. Схема управления реверсивным асинхронным двигателем электропривода задвижки
|
KM1 |
fCMl |
'M2 |
—n |
|
|
|
||
|
KM2 |
J< |
||
|
|
|
KV1
Продолжение рис.3.17 3.5.1. Схемы сигнализации положения
Эти схемы выполняют для механизмов, которые имеют два рабочих положения и более. Наибольшее распространение получили два варианта построения схем сигнализации положения: схемы сигнализации, совмещенные со схемами управления, и схемы сигнализации с независимым от схем управления питанием на группу технологических механизмов одного или разного назначения.
В схемах первого типа сигнализация положения может осуществляться одним или двумя световыми сигналами с горением ламп ровным светом. Схемы, построенные с одной лампой, сигнализируют обычно о включенном состоянии механизма и используются редко. Для таких механизмов, как задвижки, заслонки, клапаны, шиберы и т.п., применяются двухламповые схемы.
На рис.3.18 приведены примеры простейших схем сигнализации. В схеме на рис.3.18,а лампа HL горит, когда магнитный пускатель КМ включен; неисправность лампы равносильна ложному сигналу, т.к. погашенная лампа свидетельствует об отключении. Схемы с двумя лампами (рис.3.18,6) свободны от этого недостатка, т.к. в любом положении магнитного пускателя одна из них горит (HL1 - пускатель включен, HL2 - пускатель отключен). Особенностями схем на рис.3.18,в,г является включение ламп через контакты промежуточного реле KV. Эти схемы работают следующим образом. Кнопкой SB2 включается магнитный пускатель КМ, который, срабатывая, включает реле KV; его контакт шунтирует кнопку, включает лампу HL1 и отключает HL2.
r™ SB2i>
KM KK2
SBI
KV
HL2 KM
sbi
KM
^r~®
-a>
HL
a)
на-
KV
Б)
KM KK2


![]()
![]()
SB2U KK1 I
SB!
KM
KM HL,
'П/-&
i
HL
SB2
KKI
n*r
SBI
Zf\.
KM
KV
KM
HL2 HL1
l5—&
KM KK2
KV
в)
r)
Рис.3.18. Примеры построения схем сигнализации, совмещенных со схемами управления
На рис.3.19 даны примеры схем сигнализации с независимым питанием. Так, схема а) сигнализирует включенное состояние четырех магнитных пускателей КМ1 - КМ4 с помощью четырех сигнальных ламп HL1 - HL4 с питанием, независимым от питания цепей управления. Исправность всех ламп проверяется кнопкой SB. Схема б) аналогична в работе, но более удобна для восприятия. Схема в) построена на принципе соответствия или несоответствия положения ключа управления SA положению контролируемого пускателя КМ5. Если положения ключа и пускателя одинаковы, то сигнальная лампа светится ровно, если различны - мигает. Ключ SA имеет два фиксированных положения: В - Включено, О - Отключено и два положения с самовозвратом: ОВ -Операция включить, ОО - Операция отключить. Пусть ключ SA занимает положение В, а магнитный пускатель еще не включен, тогда HL5 мигает, т.к. она через контакты 3, 4 SA присоединена к шине мигающго света ШМС; лампа HL6 погашена, т.к. в ее цепи контакт КМ5 разомкнут. Поворачивая ключ в положение ОВ, включают КМ5 (цепи включения не показаны), его контакт в цепи HL5 размыкается и лампа гаснет. В цепи лампы HL6 контакт КМ5 замыкается, поэтому лампа, присоединенная через контакты 7, 8 SA к шине
ровного света ШРС, горит ровно. Если пускатель будет отключен преднамеренно, для чего ключ SA необходимо установить в положение ОО, то лампа HL6 погаснет, a HL5 будет гореть ровно. Схема г) аналогична рассмотренной, но при несоответствии ключа управления SA положению магнитного пускателя КМ6 сигнальные лампы HL7 (несоответствие при включении) и HL8 (несоответствие при отключении) горят неполным накалом, т.к. включаются через резисторы R1 и R2 соответственно.
SB
KMl
КМ2
КМ2
КМ4
VD1
VD2
VD3
VD4
HL1
HL2
HL3
HL4
■OH
ШРС SA
7 8 i '
OB
В о 00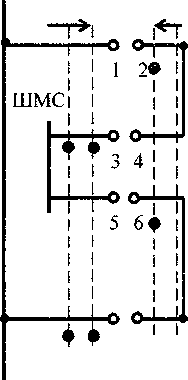
KM5 HL5
KM5 HL6
a)
в)
KM6
HL7
KM6
HL3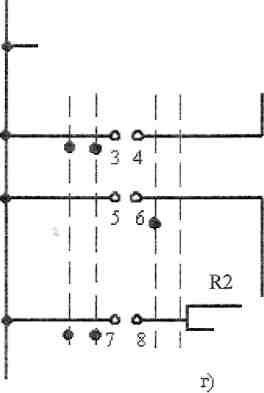
.
«■ft
" ♦■
SE
I KM2 j
V'DI ^ VD2\
HL1
HL2
Ф
Ф
SA OB В о 00
Рис.3.19. Примеры схем сигнализациич; независимым питанием
«