

Класифікація пристроїв і приладів ТЗА.
Сучасні енергоблоки теплових та атомних електростанцій, промислові виробництва неможливо експлуатувати без досконалих систем автоматичного регулювання: технологічних параметрів. Для реалізації будь-якої АСР необхідно використовувати технічні засоби: 1) контролю, 2) автоматичного регулювання, 3) сигналізації, 4) блокування, 5) пристроїв диспетчерського управління, 6) обчислювальної техніки, 7) промислового телебачення.
Ці 7 компонентів звичайно, об’єднуються під назвою АСУТП. Таким чином якість і надійність роботи АСУТП цілком залежить від якості і надійності роботи технічних засобів і програмного забезпечення обчислювальної техніки.
§ 1. Функціональна схема системи управління.

У відповідності із державними стандартами будь-яка АСР та АСУТП може бути представлена у вигляді підсистем, що взаємодіють між собою в процесі експлуатації (підтримування заданих значень регульованого параметру технологічного процесу).
Інформаційна підсистема – це сукупність технічних засобів для сприйняття, передачі на відстань і представлення інформації у формі, зручній для оператора-технолога. У неї входять прилади: 1) чутливі елементи - датчики, 2) вимірювальні пристрої та перетворювачі, 3) лінії зв’язку , 4) система дистанційної передачі показань.
Логіко-обчислювальна підсистема – це сукупність технічних засобів переробки інформації і формування команд управління за заданими законами і за заданими критеріями управління, побудованих на базі аналогових і цифрових елементів, обчислювальних і логічних пристроїв.
Виконавча підсистема – це сукупність технічних засобів, що формують регулюючий вплив на об’єкт і представляють собою виконавчі механізми та регулюючи органи.
§ 2. Автоматичні регулятори.
В основу будь-якої АСР складається з 2 елементів, включених по принципу негативного зворотного зв’язку. Об’єкт включ. в прямому напрямку, регулятор – в зворотному.

Об’єкт управління містить регульований апарат, який має фізичні одиниці на вході і виході.
РП- регулюючий прилад (формує закон регулювання), ВМ- виконавчий механізм, РО- регулюючий орган, РА- регульований апарат, ВП- вимірювальний перетворювач.
Об’єкт управління – це сукупність 1)регульованого апарату, тобто фізичного об’єкту, стан якого визначається фізичними одиницями виміряних вхідних і вихідних змінних (°С,Па, м3/сек), та 2)вимірювальних перетворювачів, що формують сигнали дистанційної передачі показань і в більшості випадків є електричними (струмові або по напрузі), та 3) регулюючого органу – це шиберка або поворотна форсунка (клапан).
Т аким
чином коефіцієнт передачі об’єкта
управління визначається як добуток 3
коефіцієнтів передачі
аким
чином коефіцієнт передачі об’єкта
управління визначається як добуток 3
коефіцієнтів передачі
![]()
Автоматичний регулятор – це сукупність взаємодіючих технічний засобів:
а)елемент порівняння, що формує сигнал відхилення поточного значення параметру від заданого ξ(t)=z(t)-xа(t).
В залежності від зміни завдання у часі система регулювання поділяється на : 1)системи стабілізації для яких z(t)=const, 2) z(t)=f(Хаi)- функція технологічного параметру, ці системи наз. слідкуючі системи, 3) z(t)= f(t)- функція часу – програмні системи.
б)регулюючий прилад – формується з-н регулювання (може бути аналогового принципу дії або цифрового). Закон регулювання може бути типовим (П,ПИ,ПИД) може бути лінійним, нелінійним, нечіткий з-н регулювання.
в)виконавчий механізм, що підсилює вихідний сигнал регулюючого приладу до потужності необхідної для переміщення регулюючого органу,
![]() ,
,
знаход. по таблиці з використанням поправки.
§ 3. Структура автоматичного регулятора.
ВП
Е
Xa(t)


КПП
ПП
ВМ
ХРП
М(t)
ε(t)
z(t)
Xп




ЕП
РП
Автоматичний регулятор складається з: 1) пристрій формування завдання (ЗП) (задаючий пристрій), 2) елемент порівняння (ЕП), 3) командно-підсилюючий пристрій (КПП)( при техн.. реалізації звичайно об’єднують ЕП і КПП = РП), 4) підсилювач потужності (ПП), 5) виконавчий механізм (ВМ).
Задаючий пристрій (ЗП) призначений для формування сигналу, що відповідає потрібному значенню регульованої величини. Фізична природа цього сигналу повинна бути такою ж, як і сигналу від вимірювального перетворювача.
Вимоги до ЗП:
1)висока стабільність у часі вихідного сигналу – z:
а)достатній діапазон сигналу зміни цього сигналу z (0-100%),
б)ЕП – призначений для порівняння дійсного (поточного) значення регулюємої величини (параметру) із заданим значенням і формування сигналу відхилення пропорційно цій різниці: ε(t)= ∑xа1(t)-z(t).
Вимоги до ЕП:
1)лінійність та стабільність у часі статичної характеристики (лінійність коефіцієнта передачі К=∆ха/∆хе=const)

2)без інерційність – миттєва передача вхідного впливу на вихід W(s)=К – пропорційна ланка

3)мати можливість підсумовування кількох вхідних сигналів.
![]()
КПП – призначений для перетворення сигналу відхилення (ε) у сигнал зручний для управління виконавчим механізмом і формування закону регулювання. КПП називають регулюючим блоком або модулем.
В промислових регуляторах елемент порівняння називають вимірювальним блоком або модулем.
Пунктиром показано варіант, коли обидва блоки містяться в одному корпусі і називається регулюючий прилад (РП).
Вимоги до КПП:
-
Цілеспрямованість дії,
-
Стабільність у часі статичної характеристики,
-
Лінійність статичної характеристики,
-
Високий і стабільний коефіцієнт передачі,
-
Можливість зміни параметрів настройки у широких межах,
-
Висока швидкодія при формуванні закону регулювання.
ПП – призначений для підсилення за потужністю регулюючого сигналу сформованого в КПП до величини (значення) достатньої для управління виконавчим механізмом.
Вимоги до ПП:
-
Високий коефіцієнт передачі за потужністю (це відношення величини струму на виході до величини струму на вході при однаковій напрузі),
-
Можливість зміни знаку або фази сигналу відповідно знаку регулюючого впливу, тобто ПП повинен бути реверсивним (реверс – зміна напрямку роботи) для можливості відкриття або зачинення ВМ.
U=220B
Конденсатор С зміщує фазу змінного струму на 90°,що забезпечує напрямок обертання магнітного поля і, відповідно, ротора. Перенесення конденсатора у коло Ⅰ обмотки змінює напрямок обертання магнітного поля у протилежну сторону, що приводить до зміни напрямку обертання ротора.
У трьохфазних електродвигунах напруги фаз зміщені відносно один одного на 120°. Тому як при включені обмоток статора "зіркою" так і при включені обмоток статора "трикутником", напрямок обертання ротора визначається напрямком чергування фаз на обмотку. Для зміни напрямку обертання ротора потрібно поміняти місцями будь-які дві фази.
Ua
Ub
Uc
Ua
Uc
Ub


Для зупинки електродвигуна пусковий пристрій повинен відключити всі три фази від обмоток статора, тоді двигун зупиняється.
ВМ – призначений для переміщення РО з метою впливу на технологічний процес.
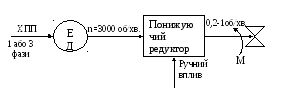
Конструктивно ВМ виконаний у вигляді одно- або трьохфазного електродвигуна, напруга на який надходить від підсилювача потужності ХПП (0-100%), кількість обертів якого зменшується від 3000 об/хв. до 0,2-1 об/хв. за допомогою понижуючого редуктора.
Вимоги до ВМ:
1)Потужність на вихідному валі достатня для переміщення РО, тобто обертаючий момент М достатній для переміщення , тому потужність електродвигунів може бути від 10 Вт до 100 кВт.
В каталогах ВМ найбільш розповсюджені типу МЕО.
МЕО-20-60, де 20 – це обертаючий момент Н.м., 60 – це час відкриття (в сек.) від 0-100%
2)Крім переміщення РО електроприводом, повинна бути можливість ручного переміщення РО (зі штурвалом).
ВМ можуть бути не лише електричними, але й гідравлічними та пневматичними. Найбільш розповсюджені прямоходні гідравлічні механізми (складаються з циліндру і поршня)
Робоче тіло – масло.

Сила, що діє на шток розраховується дуже просто F=S*∆P – сила для переміщення РО пропорційна поверхні штоку та тиску.
В гідравлічних ВМ тиск масла складає сотні атм. або десятки МПа, тому вони дуже компактні та потужні.
В енергетиці гідравлічні ВМ використовуються лише для регулювання парової турбіни , а точніше ГП3 (головної парової засувки).
Пневматичні РО – робоче середовище – повітря, по конструкції вони бувають прямо ходні (поршневі) і мембранні (найбільш поширені).

У зв’язку з тим, що тиск повітря відносно не великий (Р=1-6 кгс/см2= 0,1-0,6 МПа) для одержання більшої сили при менших тисках треба зробити гнучкий поршень у вигляді мембрани.
Складається:
-
гнучка мембрана великої площі, яка деформується при збільшені тиску (вигинається). Мембрана має гофри для розтягування під тиском.
-
оскільки тиск подається лише у верхню частину, тому для повернення мембрани в вихідний стан є повертальна пружина. Т.ч. в енергетиці використовуються в основному електричні ВМ, які можуть бути двох типів за швидкістю переміщення РО:
-
ВМ постійної швидкості, якщо на вхід подати напругу, то швидкість обертання електродвигуна буде постійна. Регулюючий вплив буде переміщувати у часі від 0-100% під кутом, який визначається кількістю обертів двигуна.
При подачі напруження на електродвигун РО відкривається від 0-100% за час, що наз. часом сервомотору.
ТВМ*dM/dt=const,
1/ТВМ=SВМ
Величина,
обернена постійній сервоприводу наз.
швидкістю
ВМ

Якщо з’єднання з РО виконується за допомогою ричажного або кулачкового з’єднання, то коефіцієнт передачі не буде = 1.

Оскільки ВМ містить масивні деталі, що обертаються з великою швидкістю (ротор електродвигуна і шестерні редуктора), то ВМ вибирають із урахуванням часу розгону і часу вибігу.
б) Інерційні ВМ – механізм пропорційної дії (швидкості),передаточна функція
WВМ(S)=KВМ (П - ланка)
Висновок: оскільки ВМ входить до складу автоматичного регулятора, який формує П, ПИ, ПИД та інші закони, то наявність інтегруючого ВМ необхідно врахувати в алгоритмі функціонування КПП.
Вимоги до ВМ:
-
достатній вхід або кут повороту до вхідного валу для переміщення РО,
-
достатній запас по потужності в порівнянні з мах перестановочним зусиллям РО,
-
можливість реверсування ВМ,
-
малі часи розгону та вибігу .
Час розгону – це проміжок часу за який ВМ приєднаний до РО набуває номінальних оборотів електродвигуна.
Час вибігу
– це проміжок часу, за який електродвигун
ВМ повністю зупиняється після відключення
електроживлення. В ідеалі вони повинні
бути=0.

Чим більше час розгону і вибігу, тим більше спотворення ідеального закону регулювання.
Для того, щоб зменшити ТРОЗГ. вибирають більш потужний ВМ, але при цьому збільшується час вибігу тому, що у більш потужних механізмах більша маса деталей що обертаються і вони мають інерцію. Тому, щоб зменшити ТВИБІГ. використовуються механічні та електричні гальмові пристрої. Електричне гальмування виконується включенням на короткий час конденсаторів, що являються навантаженням електродвигуна на вибігу і формують проти ЕДС. Механічні гальма включаються в момент виключення електродвигуна. За конструкцією вони такі ж, як у автомобілів.


