

4.3. Центр масс твердого тела и его движение
Разбив тело на
элементарные массы D
mi,
можно представить его как систему
материальных точек, взаимное расположение
которых остается неизменным. Любая из
этих элементарных масс может находиться
под воздействием как внутренних сил
![]() ,
обусловленных ее взаимодействием с
другими элементарными массами
рассматриваемого тела, так и внешних
сил
,
обусловленных ее взаимодействием с
другими элементарными массами
рассматриваемого тела, так и внешних
сил
![]() (рис. 4.13).
(рис. 4.13).
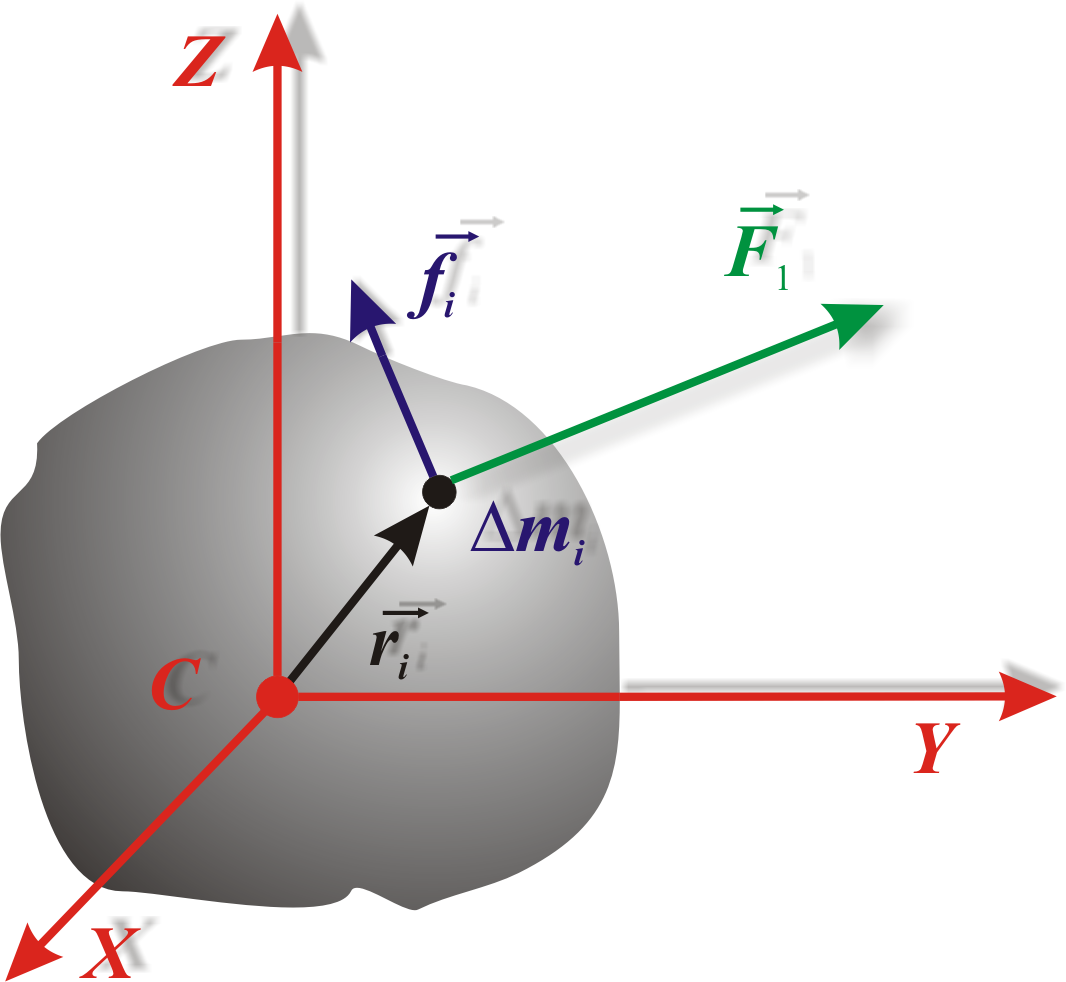
Рис. 4.13. Действие сил на твердое тело
Напишем для каждой элементарной массы уравнение второго закона Ньютона:
![]() ,
(4.12)
,
(4.12)
где
![]() – результирующая всех внутренних сил,
– результирующая всех внутренних сил,
![]() – результирующая
всех внешних сил, приложенных к данной
элементарной массе.
– результирующая
всех внешних сил, приложенных к данной
элементарной массе.
Складывая уравнения (4.12) для всех элементарных масс, получим:
![]() .
(4.13)
.
(4.13)
Однако сумма всех внутренних сил равна нулю. Поэтому уравнение (4.13) упрощается следующим образом:
![]() ,
(4.14)
,
(4.14)
где справа получается результирующая всех внешних сил, действующих на тело.
Тело, имеющее ось вращения, находится в покое, если сумма моментов сил, вращающих тело по часовой стрелке равна сумме моментов сил вращающих тело против часовой стрелки.
Пусть две материальные
точки с массами m1
и m2
соединены невесомым стержнем. Найдем
точку С,
в которой приложена равнодействующая
сил
![]() и
и
![]() .
Если стержень подпереть в этой точке,
то система будет находиться в равновесии
(рис. 4.14).
.
Если стержень подпереть в этой точке,
то система будет находиться в равновесии
(рис. 4.14).

Рис. 4.14. Определение координат центра масс
Точка, координаты которой определяются соотношением (4.15) называется центром масс.
![]()
![]()
![]() .
(4.15)
.
(4.15)
Обобщая (4.15) на n точек, получим:
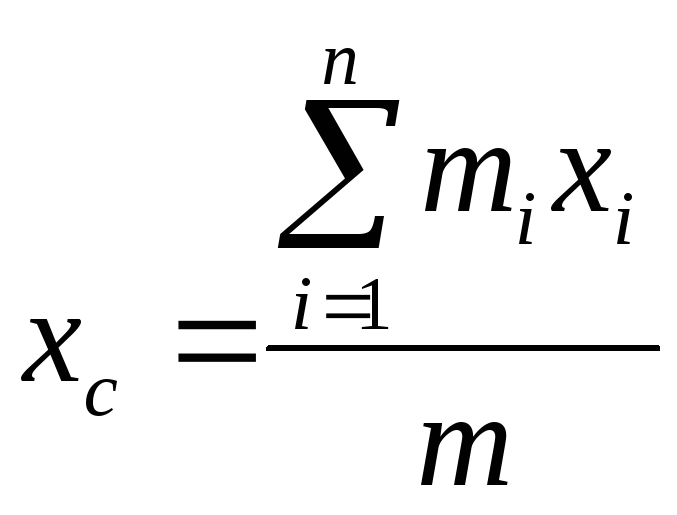 .
(4.16)
.
(4.16)
Соотношение (4.16)
справедливо и для осей ОУ
и ОZ.
Отсюда следует, что (4.16) справедливо для
случая, когда положение материальных
точек определяется радиусом-вектором
![]() (рис. 4.15).
(рис. 4.15).

Рис. 4.15. Определение радиуса-вектора центра масс
Точка С радиус–вектор, которой определяется соотношением (4.17), называется центром масс систем.
 .
(4.17)
.
(4.17)
Центром масс (или центром инерции) системы материальных точек называется воображаемая точка С, положение которой характеризует распределение массы этой системы.
Скорость центра масс рассчитывается по формуле:
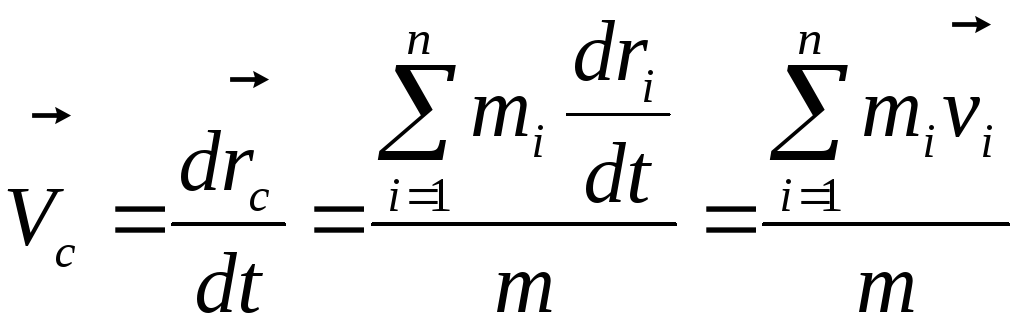 .
.
Учитывая,
что
![]() ,
а
,
а
![]() есть импульс
есть импульс
![]() системы, тогда
системы, тогда
![]() ,
(4.18)
,
(4.18)
т.е. импульс системы равен произведению массы системы на скорость ее центра масс.
![]()
![]() ,
(4.19)
,
(4.19)
т.е. центр масс системы движется как материальная точка, в которой сосредоточена масса всей системы и на которую действует сила, равная геометрической сумме всех внешних сил, приложенных к системе. Выражение (4.19) представляет собой закон движения центра масс.
Если система
замкнута, то
![]() = const.
= const.
В замкнутой системе скорость центра масс величина постоянная. Центр масс замкнутой системы либо движется прямолинейно и равномерно, либо покоится.