

2.2.3 Матрица инциденций
Информация о математической модели гидросистемы, которую содержит орграф, представлена в виде матрицы инцидентности, сформированной по следующим правилам:
-
Размерность матрицы:
-
Число строк соответствует каждому узлу орграфа за исключением базы;
-
Число столбцов соответствует ветвям орграфа.
-
Элементы матрицы:
-
Отсутствие связи между узлом и ветвью «0»
-
Если ветвь входит в узел «+1»
-
Если ветвь исходит из узла «-1».
Источник потока Q1* формально заменяется на источник потенциала P1* и добавляется условная масса m1*.
Матрица инцидентности
|
Узел |
Ветви |
|||||||||||||||||||||
|
Инерционные |
Диссипативные |
Упругие |
Источники потенциалов |
|||||||||||||||||||
|
m1 |
m2 |
m3 |
m4 |
m5 |
m*1 |
1 |
2 |
3 |
4 |
5 |
6 |
c1 |
c2 |
Рв1 |
Рв2 |
Рв3 |
Рв4 |
0 |
Р*в1 |
|||
|
1 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
||
|
2 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
||
|
3 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
-1 |
0 |
0 |
0 |
||
|
4 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
0 |
0 |
||
|
5 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
-1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
||
|
1* |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
-1 |
0 |
-1 |
0 |
0 |
0 |
0 |
0 |
1 |
||
2.3 Узловой метод формирования математической модели гидросистемы
Применим модифицированный узловой метод, согласно которому для гидросистемы математическая модель имеет вид:

![]() (1)
(1)
![]() (2)
(2)
где
![]() (3)
(3)
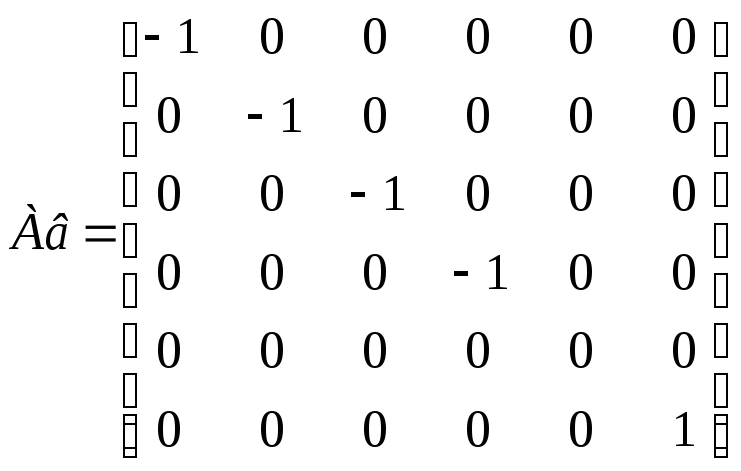
На основании матрицы инцидентности выпишем следующие подматрицы АУ, АД, АИ,АВ.



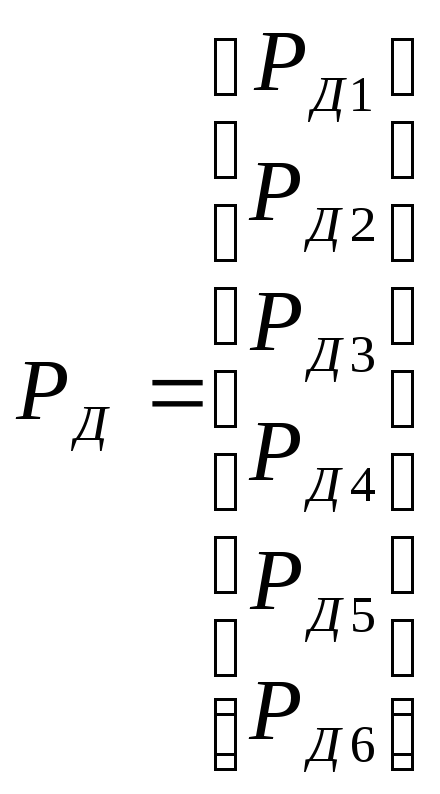
Матрицы потенциалов источников РВ, РУ, РД компонентов:


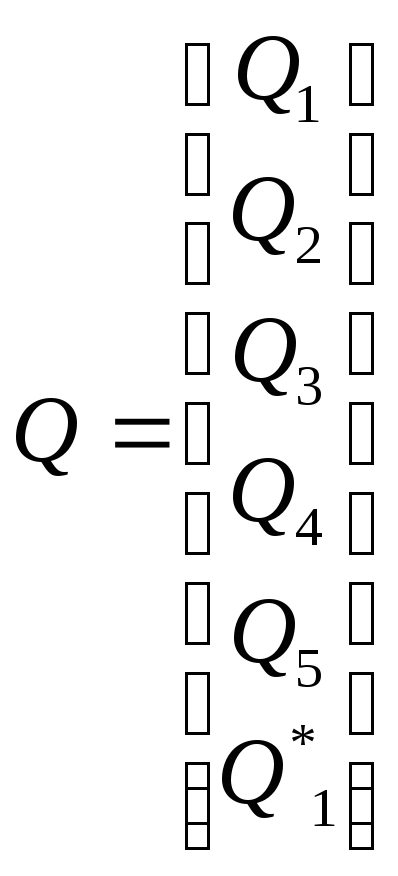
Матрица фазовых переменных типа потока Q:
Вычислим матричное произведение слагаемых правой части:
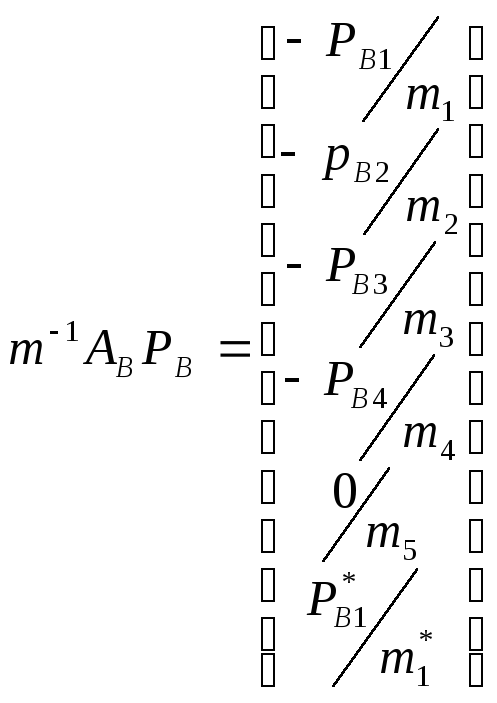

Сложим полученные матрицы с уравнением (1):

![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
![]() (7)
(7)
![]() (8)
(8)
 (9)
(9)
Учитывая,
что
![]() ,
а
,
а
![]() ,
следовательно
,
следовательно
![]() ,
то вместо последнего уравнения системы
(8) имеем:
,
то вместо последнего уравнения системы
(8) имеем:
![]() (10)
(10)
Уравнения, необходимые для определения РУ и РД получим, вычислив матричные произведения в выражениях (2) и (3):
![]() (11)
(11)
![]() (12)
(12)
![]()
![]()
![]()
![]()
![]()
![]()
Таким образом, матричная модель рассматриваемой гидравлической системы представляется системой обыкновенных дифференциальных уравнений (4), (5), (6), (7), (8), (9), (11),(12) и алгебраическими выражениями (10).
Компонентные уравнения диссипативных элементов носят более сложный характер. При этом выделяют линейные и нелинейные потери в гидромагистралях и уравнения записываются в следующем виде:
![]() (13)
(13)
где
![]() - коэф. гидравлического сопротивления,
характеризующий линейные потери при
ламинарном движении жидкости;
- коэф. гидравлического сопротивления,
характеризующий линейные потери при
ламинарном движении жидкости;
![]() - коэф.
гидравлического сопротивления,
характеризующий нелинейные потери
при турбулентном движении жидкости (по
длине и местные).
- коэф.
гидравлического сопротивления,
характеризующий нелинейные потери
при турбулентном движении жидкости (по
длине и местные).
![]()
![]()
![]()
![]()
![]()
![]()
Определение параметров элементов модели гидравлической системы
Площадь
сечения магистрали:
![]() (14)
(14)
![]() [
м
[
м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [
м
[
м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [ м
[ м![]() ]
]
Объем участка трубопровода:
![]() (15)
(15)
![]() [
м
[
м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [
м
[
м![]() ]
]
![]() [ м
[ м![]() ]
]
![]() [
м
[
м![]() ]
]
Доля объема участка трубопровода:
![]() (16)
(16)
![]()
![]()
![]()
![]()
![]()
![]()
Коэффициент массы:
![]() (17)
(17)
![]() [
кг/м
[
кг/м![]() ]
]
![]() [ кг/м
[ кг/м![]() ]
]
![]() [ кг/м
[ кг/м![]() ]
]
![]() [
кг/м
[
кг/м![]() ]
]
![]() [
кг/м
[
кг/м![]() ]
]
![]() [
кг/м
[
кг/м![]() ]
]
Коэффициент линейных гидравлических потерь:
![]() (18)
(18)
![]()
![]()
![]()
![]()
![]()
![]()
Коэффициент нелинейных гидравлических потерь:
![]() (19)
(19)
![]()
![]()
![]()
![]()
![]()
![]()
Коэффициент жесткости трубопровода:
 (20)
(20)
![]() [Па]
[Па]
![]() [Па]
[Па]
![]() [Па]
[Па]
![]() [Па]
[Па]
![]() [Па]
[Па]
![]() [Па]
[Па]
Общий коэффициент жесткости при разветвлении трубопровода находится по формуле:
 (21)
(21)
![]() [Па]
[Па]
![]() [Па]
[Па]