

Неидеальное интегрирующее звено
Строго говоря, любое реальное интегрирующее звено неидеально.
Иногда грубое
интегрирование выполняют с помощью
статического звена, например, с помощью
пассивной RCцепи, для
которой ранее было найдено уравнение
динамики![]() .
При переходе вs–
область уравнение принимает вид
.
При переходе вs–
область уравнение принимает вид![]() или
или![]() .
Передаточная функция такого звена
определится выражением:
.
Передаточная функция такого звена
определится выражением:
![]()
Дифференцирующее инерционное звено
Рассмотрим схему
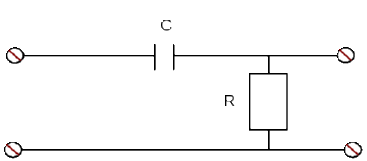
Для этой схемы законы Кирхгофа для токов и напряжений имеют вид:
![]() ,
,
где у токов и напряжений опущен аргумент (время) с целью обеспечения наглядности математических выкладок. Далее учитывая, что
![]() ,
,
![]()
перепишем уравнение Кирхгофа для напряжений
![]() ,
,
![]()
Подставим последнее
выражение
![]() в интеграл, получим
в интеграл, получим
![]()
Продифференцируем левую и правую части уравнения, получим дифференциальное уравнение рассматриваемого звена:
![]()
Далее, чтобы получить выражение передаточной функции, умножим левую и правую части уравнения на одинаковый сомножитель Т = RС, применим преобразование Лапласа, перейдем к изображениям, сгруппируем члены нужным образом. Будем иметь
![]()
Погрешность замены идеального звена неидеальным звеном, можно уменьшить, выбрав Tдостаточно малым, и вводя большой коэффициент усиленияk. Передаточная функция такого звена определится выражением:
![]() .
.
Переходная функция звена, то есть реакция звена на входное воздействие
х(t) = 1(t)при начальных условияхх(0) = 0,будет следующей:
![]()
В момент включения h(0)=k, то есть выходная величина изменяется скачком аналогично изменению входнойх(0) = 1.
Идеальное форсирующее звено
Введение производных в закон регулирования осуществляется обычно с помощью так называемых форсирующих звеньев. Идеальное форсирующее звено осуществляет сложение выходной величины с ее производной и имеет передаточную функцию
![]()
Апериодическое звено первого порядка
Рассмотрим звено с передаточной функцией
![]() .
.
В таком звене при
![]() преобладает форсирование (дифференцирование),
при
преобладает форсирование (дифференцирование),
при![]() - инерционное запаздывание (интегрирование).
Поэтому такое звено часто называют
интегрирующим. При
- инерционное запаздывание (интегрирование).
Поэтому такое звено часто называют
интегрирующим. При![]() ,
оно превращается в часто используемое
звено, называемое статическим звеном
первого порядка, инерционным,
апериодическим. ВеличиныkиTназываются
соответственно
,
оно превращается в часто используемое
звено, называемое статическим звеном
первого порядка, инерционным,
апериодическим. ВеличиныkиTназываются
соответственно
коэффициентом усиления и постояной времени.
Колебательное звено
Уравнение динамики такого звена было получено ранее на примере RLCконтура. Такое звено имеет дифференциальное уравнение вида
![]() .
.
Перейдем к изображению Лапласа, получим:
![]() .
.
![]() .
.
Откуда следует выражение его передаточной функции
![]()
Колебательное звено,
у которого
![]() ,
называется консервативным
,
называется консервативным
( резонансным) звеном.
Аналогичным образом получены передаточные функции остальных типовых звеньев, результаты внесены в таблицу 1:
Таблица 1.
|
Тип звена |
Передаточная функция |
|
1. Безынерционное звено |
k, k = const |
|
2. Идеальное дифференцирующее звено |
k s |
|
3. Дифференцирующее звено с замедлением |
ks / (1+Ts) |
|
4. Идеальное интегрирующее звено |
k / s |
|
5. Интегрирующее звено с замедлением |
k / (s (1 + Ts)) |
|
6. Апериодическое звено 1-го порядка |
k / (Ts+1) |
|
7. Апериодическое звено 2-го порядка |
k / (T2s2+T1s+1) |
|
8. Колебательное звено |
k / (Ts2+2Ts+1) |
|
9. Идеальное форсирующее звено |
Ts+1 |
|
10. Изодромное звено |
k ( Ts +1) / s |
|
11. Консервативное звено |
k / ( T2s2+ 1 ) |