

Симметричный оптимум настройки контуров регулирования
Считается, что замкнутый контур регулирования с единичной отрицательной обратной связью настроен на симметричный оптимум (СО), если он имеет передаточную функцию третьего порядка вида
![]() ,
(6.7)
,
(6.7)
где
![]() - малая постоянная времени некомпенсируемого
апериодического звена;
- малая постоянная времени некомпенсируемого
апериодического звена;
ас=3,58 – коэффициент симметричной настройки;
![]() -
стандартный коэффициент настройки
контура.
-
стандартный коэффициент настройки
контура.
Для контура, имеющего стандартную настройку на СО (ас=8), переходный процесс отработки ступенчатого задающего воздействия представлен на рис.6.4. Он описывается уравнением
 (6.8)
(6.8)
и
имеет следующие показатели качества:
время переходного процесса ![]() ;
время нарастания
;
время нарастания ![]() ;
время первого максимума
;
время первого максимума ![]() ;
время первого минимума
;
время первого минимума ![]() ;
перерегулирование
;
перерегулирование ![]() %;
число колебаний
%;
число колебаний ![]() .
.
Из анализа показателей качества следует, что они в значительной степени отличаются от показателей контура, настроенного на МО.
Рис.6.4.
Переходная функция контура регулирования,
настроенного
на симметричный оптимум
У– без фильтра на входе,
УФ– с фильтром на входе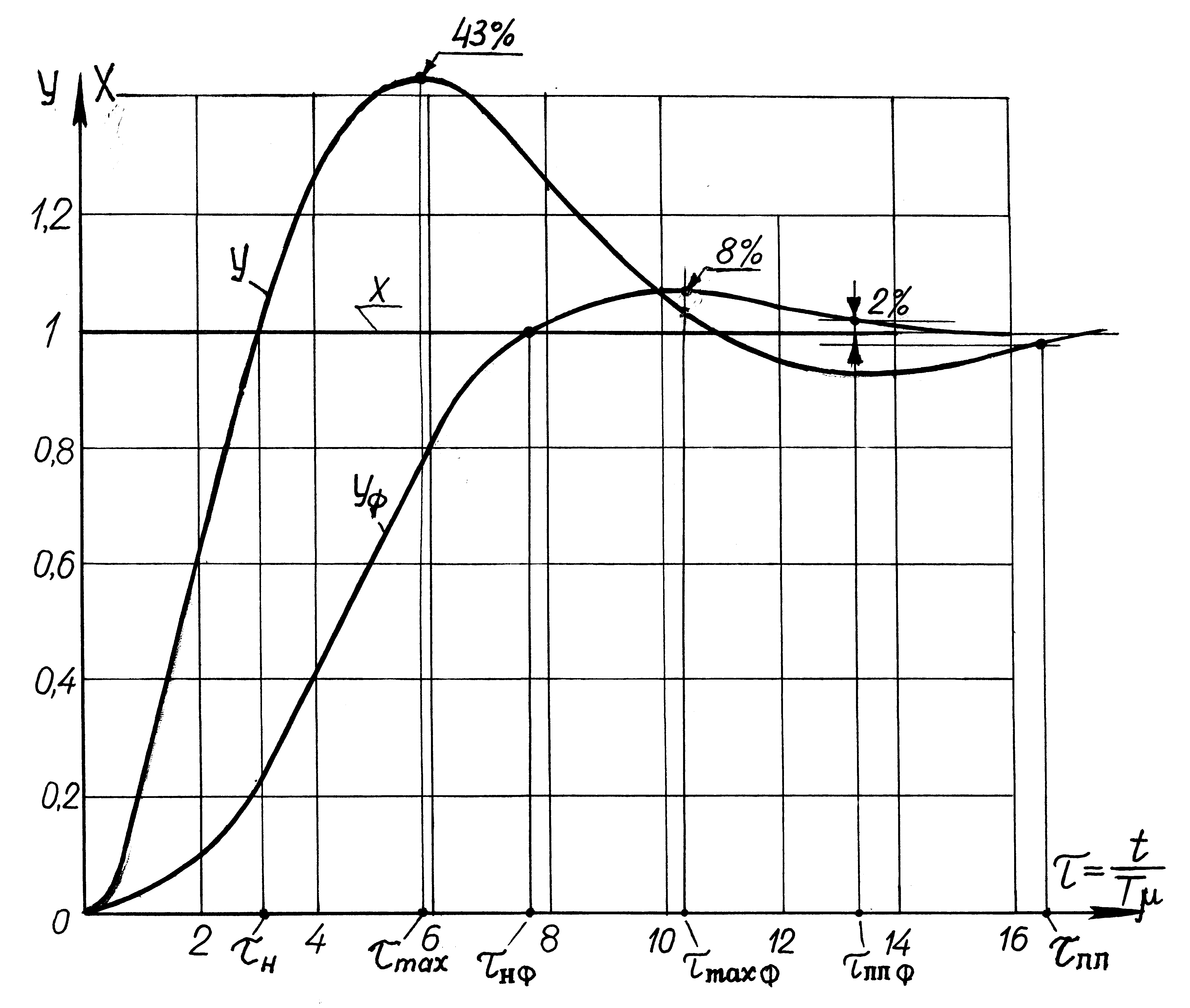
![]()
![]() . (6.9)
. (6.9)
Тогда передаточная функция по задающему воздействию при стандартной настройке запишется в следующем виде
![]() . (6.10)
. (6.10)
Для контура, настроенного на СО с фильтром на входе, переходный процесс отработки ступенчатого задающего воздействия представлен на рис.6.4. Он описывается уравнением
 (6.11)
(6.11)
и
имеет следующие показатели качества:
время переходного процесса ![]() ;
время нарастания
;
время нарастания ![]() ;
время первого максимума
;
время первого максимума ![]() ;
перерегулирование
;
перерегулирование ![]() %;
число колебаний
%;
число колебаний ![]() .
.
Следовательно, за счет компенсирующего действия фильтра на входе управления контура достигнуто значительное улучшение динамических показателей.

![]() .
(6.12)
.
(6.12)
Рис.6.5.
ЛАЧХ и ЛФЧХ разомкнутого контура
регулирования, настроенного на
симметричный оптимум
1
– стандартная настройка (аС=8)
2
– настройка на "минимальную
колебательность" (аС=6,4)![]() частота среза,
частота среза, ![]() - первая частота сопряжения асимптот,
- первая частота сопряжения асимптот,
![]() - вторая частота
- вторая частота
сопряжения. Запас по фазе на частоте среза
=38.
ЛАЧХ имеет симметричную форму относительно
частоты среза с наклонами асимптот
-40дб/дек,
-20дб/дек,
-40дб/дек. Поэтому такой настройке
присвоено название симметричный
оптимум.
Настройку контура можно несколько
улучшить, увеличив в 1,25 раза частоту
среза контура, взяв соответственно
коэффициент настройки ас=6,4.
В этом случае реализуется настройка на
“минимальную колебательность”.
Сопрягающие частоты с1,
с2
при этом должны оставаться неизменными.
Применение такой настройки несколько
снижает перерегулирование и увеличивает
быстродействие, а именно:
![]() , 42%.
Запас по фазе уменьшается всего на 3
и становится равным ср=35.
, 42%.
Запас по фазе уменьшается всего на 3
и становится равным ср=35.
Когда в прямой цепи контура регулирования имеется только одно апериодическое звено с малой постоянной времени, то оно и является звеном с некомпенсируемой постоянной времени.
Если в прямой цепи контура регулирования имеется несколько апериодических звеньев с малыми постоянными времени, то для расчета параметров регулятора эти инерционные звенья необходимо заменить одним эквивалентным апериодическим звеном с постоянной времени Те.
![]() , (6.13)
, (6.13)
где
![]() - эквивалентная некомпенсируемая
постоянная времени.
- эквивалентная некомпенсируемая
постоянная времени.