

Кафедра301 Рациональное управление объектами теория и приложения
.pdfНачало
Область поиска
Xmin, Ymin
Xmax, Ymax
Максимальный радиус Rmax
Создание массива для хранения точекокружностей
С[Xmax - Xmin]
[Ymax - Ymin][Rmax]
Определение шага изменения для значения a и b (ha,hb).
Выделение массива активных точек кадра изображения
(Xi, Yi), i = 1..k
a = Xmin
b = Ymin
i = 1
R = sqrt((Xi-a)^2 - (Yi-b)^2)
C[a][b][R] = C[a][b][R]+1
|
|
Да |
|
|
|
||
i < k |
i := i + 1 |
|
|
||||
|
Нет |
|
Да |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|||
b < Ymax |
b := b + hb |
|
|
||||
|
|
|
|
|
|||
|
Нет |
|
Да |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|||
a < Xmax |
|
|
|
|
|||
a := a + ha |
|
|
|||||
|
|
|
|
|
|||
|
Нет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вмассиве С[a][b][R]
найти максимум
Восстановить активные точки для максимального значения С
a, b, R
Конец
Рисунок 6.7 – Блок-схема алгоритма преобразования Хафа для поиска окружностей
240

|
|
|
|
|
|
|
|
|
|
|
Начало |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Маршрут |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
движения АР, |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
R, цветовая |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
модель |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Получение видео- |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
последовательности |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выделение кадра видео- |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
последовательности |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Размытиеграниц |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
изображения с помощью |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
медианного фильтра |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Преобразование |
|
|
|
|
|
|||||
|
|
|
|
|
|
изображения в необходимое |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
цветовое пространство |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Клонирование изображения |
|
|
|
||||||||||||
|
|
|
|
|
|
и преобразование в градации |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
серого |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поиск визуального |
|
|
|
|
|
|
||||
|
Перемещение АР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
ориентира методом |
|
|
|
|
|
|
|||||||||
|
по маршруту |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
преобразования Хафа |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нет |
|
|
|
|
|
|
Да |
|
|
|||||||
|
|
|
|
|
|
|
Ориентир |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
определен? |
|
|
|
|
|
|
||||
Выделение ориентира на изображении
Преобразование экранных координат визуального ориентира
Определение линейных и угловых смещений визуального ориентира относительно центра кадра
Формирование управления АР по приближениюк ориентиру
Угловое положение визуального ориентира и дальность до ориентира
Конец
Рисунок 6.8 – Блок-схема идентификации визуального ориентира
241

Начало
radius = const
|
|
Нет |
Rпол = 90 |
Да |
|
|
|
|
|
Нет |
|
|
Да |
Остановка |
Rпол < 90 |
|
мобильного |
||
|
|
|
||
|
|
|
|
робота |
Движение назад |
|
Движение вперед |
Конец |
|
Рисунок 6.9 – Блок-схема формирования движения робота |
||||
для локализации визуального ориентира |
||||
Для экспериментальной отработки алгоритма был проведен эксперимент с трехколесным АРи визуальнымориентиромв видекрасного шара(рисунок6.10).
Рисунок 6.10 – Схемапроведения эксперимента
242

Основное положение испытаний – условие о необходимости проведения экспериментов на поверхности с покрытием, обеспечивающим движение колес робота без проскальзывания при достаточном освещении. Другое условие эксперимента − наличие одного визуального ориентира вблизи АР, так как используемый алгоритм локализирует только один визуальный ориентир.
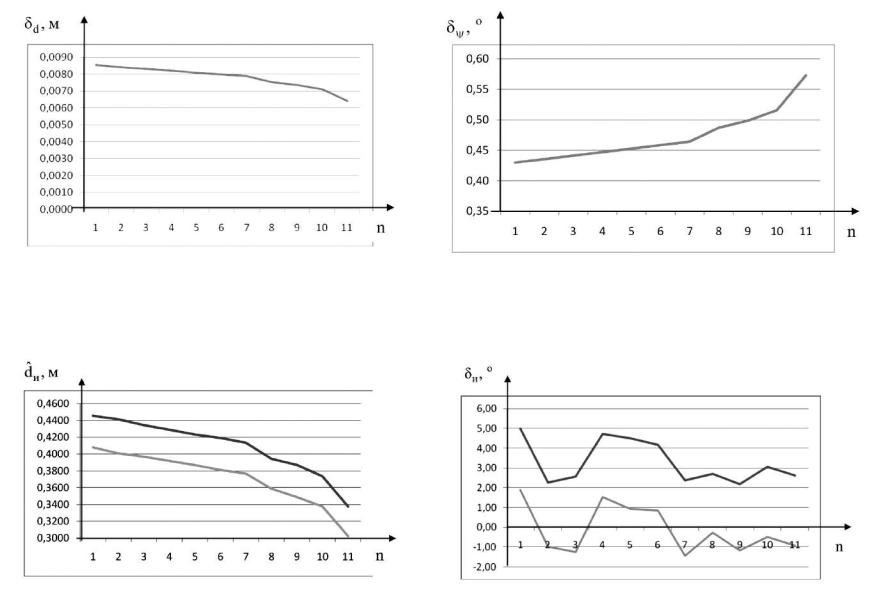
В ходе выполнения экспериментальной отработки были сформированы облик экспериментальной установки и условия испытаний АР, реализован алгоритм функционирования робота при движении к визуальному ориентиру и получены экспериментальные оценки для значений дальности и угла рыскания при поворотеАРна визуальныйориентир (рисунок6.11 – 6.22).
Рисунок 6.11 – Окно с координатами центра визуального ориентира на матрице камеры
Рисунок 6.12 – Окно с видеоизображением визуального ориентира на расстоянии 63 см
243

Рисунок 6.13 – Окно с видеоизображением визуального ориентира на расстоянии 32 см
Рисунок 6.14 – Окно командной строки после завершения роботы программы
В результате выполнения алгоритма управления роботом в соответствии с поставленной задачей были получены оценки расстояния до визуального ориентира при движении робота, а также угла рыскания относительно центра определенного визуального ориентира.
244

245
Рисунок 6.15 – Зависимость расстояния |
Рисунок 6.16 – Зависимость угла рыскания от числа |
до визуального ориентира от числа измерений |
измерений |
Рисунок 6.17 – Погрешность определения |
Рисунок 6.18 – Погрешность определения угла |
расстояния до визуального ориентира |
рыскания |

VII |
ИССЛЕДОВАНИЕ СЕРВОПРИВОДА 15Л464 |
В ШТАТНОМ И НЕШТАТНОМ РЕЖИМАХ |
|
|
Долог путьпоучений, короток и успешен путь примеров. |
|
Луций Анней Сенека (ок. 4 в. до н.э. − 65 в. н.э.) − государственный |
|
деятель, философ, писатель |
Сервоприводы используют в качестве исполнительных элементов в системах управления летательными аппаратами различного назначения. Актуальным представляется исследование функциональных возможностей сервопривода по парированию вариаций характеристик, вызванных дестабилизирующими воздействиями.
7.1 Назначение и устройство сервопривода 15Л464
Сервопривод 15Л464 используют в определённом классе ракет для управления рулевыми поверхностями, а в учебном процессе − на лабораторном стенде (рисунок 7.1) в лаборатории «Исполнительных устройств и сервоприводов» (рисунок 7.2) [1].
Сервопривод – это преобразователь электрического сигнала управления в механическое перемещение управляющего органа.
Исследуемый привод (рисунок 7.3) представляет собой следящую систему, состоящую из исполнительного элемента, преобразующего электрическую энергию в механическую, сравнивающего устройства, усилителя мощности и датчика обратной связи.
Рисунок 7.1 – Внешний вид лабораторной установки для исследования характеристик сервопривода 15Л464
248
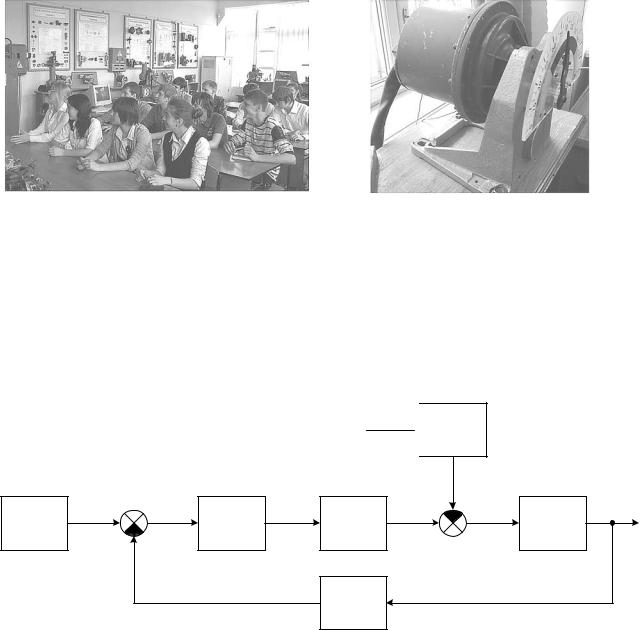
Рисунок 7.2 – Лаборатория |
Рисунок 7.3 – Внешний вид |
исполнительных устройств |
исследуемого сервопривода |
и сервоприводов |
|
Выходной вал электродвигателя совершает вращательное движение с определенной угловой скоростью, которой соответствует угол отклонения на выходе редуктора. Таким образом, привод является позиционным.
На рисунке 7.4 показана функциональная схема исследуемого сервопривода.
mН (t) ЭДf.
ЭДf.
ωfЭД (t)
u |
З(t) |
u(t) |
u |
УМ (t) |
′ |
(t) |
Р |
(t) |
ϕ(t) |
ωЭД |
ωЭД |
||||||||
ЗУ |
|
|
УМ |
|
ЭД |
|
|
|
Р |
|
|
uД (t) |
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
Рисунок 7.4 – Функциональная схема исследуемого сервопривода: ЗУ – задающее устройство; УМ – усилитель мощности;
ЭД – электродвигатель; Р – редуктор; Д – датчик; uз(t) – задающее воздействие; u(t) – сигнал рассогласования; uум (t) – сигнал на выходе усилителя мощности; mн (t) − момент нагрузки на валу электродвигателя;
ωэд(t) − угловая скорость ЭД; ωfэд(t) – изменение угловой скорости ЭД
от mн (t); ωрэд(t) − результирующая угловая скорость; ϕ(t) – угловое положение выходного вала привода; uд(t)– напряжение с выхода датчика угла
В качестве исполнительного элемента используют электродвигатель постоянного тока независимого возбуждения, а в качестве датчика − потенциометрический датчик угла.
249