

Колебательное, консервативное и апериодическое второго порядка звенья
Звено, которое можно описать уравнением
![]() ,
(
)
,
(
)
или в другой форме
![]() ,
где
,
где
![]() ,
,
![]() ,
(3.29)
,
(3.29)
или передаточной функцией
![]() ,
(3.30)
,
(3.30)
называют
колебательным,
если
![]() ;
консервативным,
если
;
консервативным,
если
![]() (
(![]() ),
и апериодическим
звеном второго порядка,
если
),
и апериодическим
звеном второго порядка,
если
![]() .
Коэффициент
.
Коэффициент
![]() называют коэффициентом
демпфирования
(параметром затухания, коэффициентом
колебательности), величину
называют коэффициентом
демпфирования
(параметром затухания, коэффициентом
колебательности), величину
![]() называют угловой
частотой свободных колебаний
(при отсутствии затухания),
‑ постоянная
времени.
называют угловой
частотой свободных колебаний
(при отсутствии затухания),
‑ постоянная
времени.
Колебательное звено ( )
Условие
означает, что корни характеристического
уравнения
![]() комплексные
комплексные
![]() .
.
Примерами
колебательных звеньев являются
колебательные
![]() -
цепи, управляемые двигатели постоянного
тока при выполнении условия
-
цепи, управляемые двигатели постоянного
тока при выполнении условия
![]() ,
упругие механические передачи,
гироскопические элементы.
,
упругие механические передачи,
гироскопические элементы.
Уравнение установившегося режима звена (уравнение статики)
![]() .
.
Переходная функция колебательного звена является решением дифференциального уравнения (3.29) при .
Покажем это:
Преобразуем исходное уравнение по Лапласу
![]() ,
,
начальные
условия:
![]() ,
,
![]() ,
,
![]() .
.
Найдем![]() ,
,
отсюда
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Теперь изображение переходной функции
![]() .
(3.31)
.
(3.31)
Для
определения оригиналов второго и
третьего слагаемых
изображения
![]() приведем
их к форме, представляемой в таблице
оригиналов.
приведем
их к форме, представляемой в таблице
оригиналов.
Преобразуем второе слагаемое:
 .
.
Введем обозначения:
![]() - коэффициент
затухания переходного процесса,
(3.32)
- коэффициент
затухания переходного процесса,
(3.32)
![]() - частота
затухающих колебаний.
(3.32)
- частота
затухающих колебаний.
(3.32)
Теперь второе слагаемое примет вид:
 .
.
По таблице изображений по Лапласу определим оригиналы
![]() ,
,
![]() .
.
Третье слагаемое в (3.31) преобразуем к виду:
 .
.
С учетом обозначений (3.32) третье слагаемое примет вид:
 .
.
Оригинал этого
выражения
![]() .
.
Окончательно, переходная функция колебательного звена
 (3.33)
(3.33)
Весовая функция колебательного звена
![]() ,
,
![]() (3.34)
(3.34)
На рис. 3.8 приведена переходная функция колебательного звена.
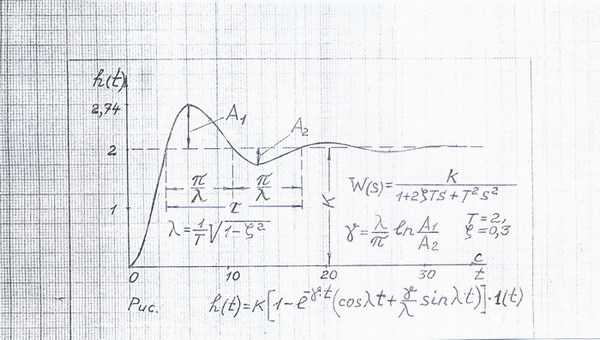

Рис. 3.8. Переходная функция колебательного звена
По переходной
характеристике можно определить
параметры колебательного звена следующим
образом. Коэффициент передачи
определяют
по установившемуся значению
![]() переходной
функции
переходной
функции
![]() .
.
![]() ,
,
![]()
Из отношения
![]() найдем
найдем
![]() .
.
Частота затухающих колебаний
![]() ,
где
,
где
![]() -
период затухающих колебаний.
-
период затухающих колебаний.
Коэффициент
демпфирования звена может быть найден
из выражения
![]() ,
а постоянная времени звена из выражения
,
а постоянная времени звена из выражения
![]() .
(3.35)
.
(3.35)
(Из выражений
(3.32) имеем
![]() и
и
![]() ,
,
![]() ,
откуда и следует (3.35)).
,
откуда и следует (3.35)).
По переходной характеристике можно определить величину перерегулирования
![]() .
(3.36)
.
(3.36)
Можно показать,
что перерегулирование
![]() зависит только от коэффициента
колебательности
и не зависит от постоянной времени
:
зависит только от коэффициента
колебательности
и не зависит от постоянной времени
:
![]() (3.37)
(3.37)
(Берется производная
![]() ,
приравнивается нулю; полагая
,
приравнивается нулю; полагая
![]() ,
определяется время
,
определяется время
![]() и подставляется в (3.33), находится
и подставляется в (3.33), находится
![]() ;
учитывая, что
;
учитывая, что
![]() ,
определяется
,
определяется
![]() ).
).
Частотные характеристики звена
Выражение АФЧХ
получается при подстановке в передаточную
функцию звена
![]() :
:
![]() .
(3.38)
.
(3.38)
АЧХ:
![]() (3.39)
(3.39)
Умножив числитель и знаменатель (3.38) на комплексно-сопряженное знаменателю выражение, получим вещественную и мнимую частотные функции
![]() ,
,
![]() .
.
ФЧХ:
![]() изменяется монотонно от 0 до (
изменяется монотонно от 0 до (![]() )
и выражается формулой
)
и выражается формулой
![]()
(при
функция
![]() меняет знак на плюс)
меняет знак на плюс)
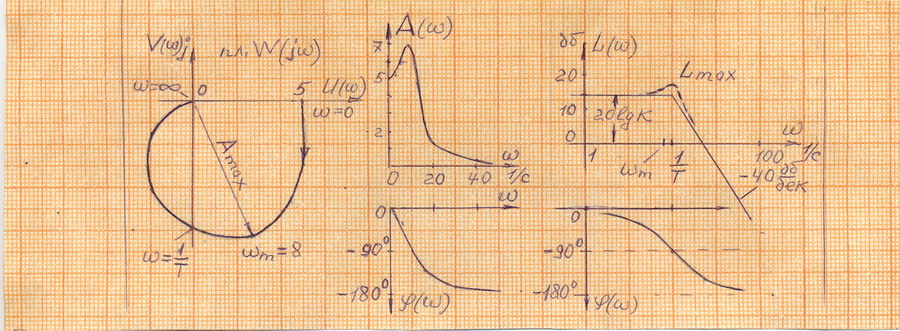
Рис. 3.9. Частотные характеристики колебательного звена