

46. Принципы модуляции сигналов.
В технических системах применяются два способа передачи и преобразования сигналов – непрерывный и дискретный. При непрерывном способе передается и преобразуется каждое мгновенное значение сигнала, а при дискретном – сигнал, квантованный по времени или по уровню. В дискретно-непрерывных САУ должны происходить два процесса – получение дискретных данных из непрерывных и обратное преобразование дискретных данных в непрерывные.
Квантованием
называется процесс преобразования
непрерывных сигналов в дискретные.
Различают три вида квантования сигналов:
по времени, по уровню и одновременно по
времени и по уровню. Графическая
иллюстрация трех видов квантования
сигналов представлена на рис. 1, на
котором непрерывные сигналы
![]() показаны пунктирными кривыми, а
результаты квантования (кванты, или
дискреты) – сплошными вертикальными
линиями. Совокупности дискрет образуют
дискретные функции времени
показаны пунктирными кривыми, а
результаты квантования (кванты, или
дискреты) – сплошными вертикальными
линиями. Совокупности дискрет образуют
дискретные функции времени
![]() .
.

Рис. 1. Виды квантования сигналов.
Квантование по времени соответствует фиксации значений непрерывного сигнала в дискретные обычно равноотстоящие друг от друга моменты времени О, Т, 2Т, ..., пТ, где Т называется периодом дискретности, или периодом повторения (рис. 1 а).
Процесс квантования по времени обычно осуществляют с помощью импульсного элемента – устройства, изменяющего некоторые параметры выходных импульсов в зависимости от значений входных сигналов. Поэтому этот процесс часто называют импульсной модуляцией.
амплитудно-импульсная модуляция сигнала (АИМ)-при которой амплитуда импульсов зависит от значения входного сигнала в момент начала действия импульса. Известны также широтно-импульсная модуляция (ШИМ) и временная импульсная модуляция (ВИМ), в которых также применяется квантование.
Автоматические системы, в которых имеет место процесс квантования сигналов по времени, называются импульсными системами. В этих системах определение разности между требуемым и действительным значениями управляемой величины (сигнала рассогласования) производится не непрерывно, а лишь в дискретные моменты времени.
Квантованием по уровню называется процесс фиксации определенных дискретных уровней сигнала в произвольные моменты времени (рис. 1 б). Системами, в которых осуществляется квантование по уровню, являются релейные автоматические системы. В управляющих устройствах этих систем находят применение двух- и трехпозиционные реле.
Наряду
с раздельным квантованием во многих
случаях применяют комбинированное
квантование по времени и по уровню,
когда непрерывный сигнал заменяется
ближайшими дискретными по уровню
значениями в определенные моменты
времени О, Т, 2Т, ..., пТ (рис. 1, в). В
результате такого квантования непрерывная
функция
преобразуется в дискретную
![]() .
.
Системы, в которых происходит процесс квантования сигналов по времени и по уровню, называются цифровыми, или кодовыми, системами. В этих системах квантование осуществляется цифровыми вычислительными устройствами (ЦВУ) или кодо-импульсными модуляторами.
47. Амплитудно-импульсные системы.
Рис. 11. Схемы замкнутых
импульсных систем
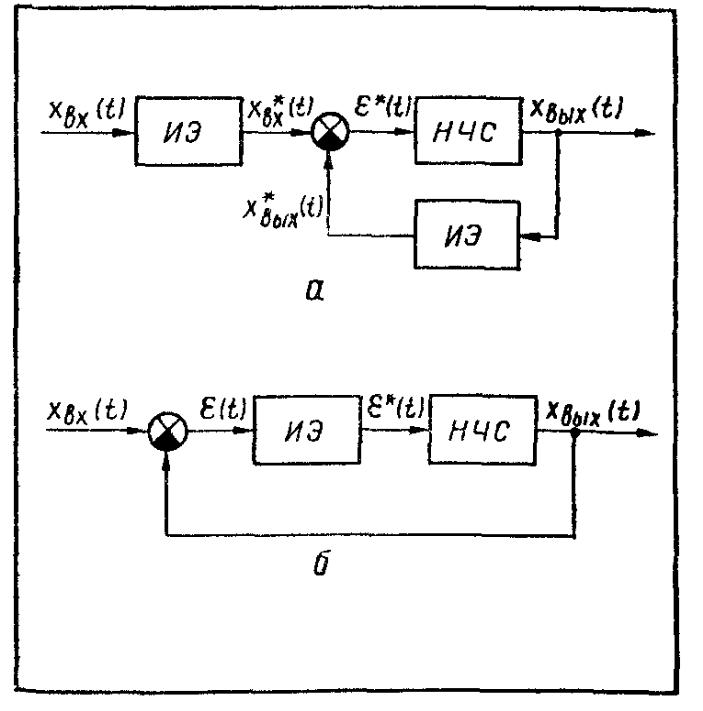
Импульсная система может быть представлена в виде соединения импульсного элемента ИЭ и непрерывной части НЧС.
На
рис. 11, а изображена схема системы с ИЭ
на входе и в цепи обратной связи, а на
рис. 11, б - схема с ИЭ в прямой цепи системы.
Легко заметить, что при одинаковых
характеристиках ИЭ и НЧС эти системы
идентичны по своим динамическим
свойствам, так как через их непрерывные
части проходит одинаковый дискретный
сигнал рассогласования
![]() .
.
Основными
параметрами последовательности импульсов
являются (рис. 12): А - высота, или амплитуда,
импульсов;
![]() -
ширина, или длительность, импульсов; Т
- расстояние между импульсами, или
период повторения;
-
ширина, или длительность, импульсов; Т
- расстояние между импульсами, или
период повторения;
![]() - форма импульса.
- форма импульса.
В зависимости от вида модуляции, т. е. от того, какой из параметров импульса изменяется в соответствии со входным модулирующим сигналом, импульсные элементы подразделяются на элементы с АИМ, ВИМ и ШИМ.
Функция, устанавливающая связь между модулируемым параметром и соответствующими значениями входной переменной, называется статической характеристикой импульсного элемента. Эта характеристика может быть линейной или нелинейной. Импульсный элемент с линейной (линеаризуемой) характеристикой является линейным элементом, а с нелинейной — нелинейным.
Закон изменения представляющего параметра импульса или последовательности импульсов во времени называется сигналом. Сигналы в импульсных системах описываются дискретными функциями времени.
С целью облегчения исследования автоматических систем их реальные импульсные элементы заменяют последовательным соединением простейшего импульсного элемента ПИЭ и формирующего элемента ФЭ (рис. 14).

Рис. 14. Схемы простейшего импульсного элемента ПИЭ и
формирующего элемента ФЭ
Простейший импульсный элемент преобразует непрерывный входной сигнал в кратковременные импульсы, площади которых пропорциональны значениям входной величины в дискретные моменты времени.
 Эти
импульсы можно представить в виде
дельта-функции
Эти
импульсы можно представить в виде
дельта-функции
![]() с соответствующими значениями их
площади S. Следовательно
ПИЭ можно рассматривать как импульсный
модулятор с несущей в виде последовательности
единичных импульсов - дельта-функций
(рис. 15):
с соответствующими значениями их
площади S. Следовательно
ПИЭ можно рассматривать как импульсный
модулятор с несущей в виде последовательности
единичных импульсов - дельта-функций
(рис. 15):
 (4)
(4)
Рим.
15. Схема простейшего импульсного элемента
как модулятора
![]() -функций.
-функций.
На выходе простейшего импульсного элемента получается сигнал
 (5)
(5)
Формирующий элемент характеризуется тем, что его реакции на дельта-функции (5) совпадают по своей форме с импульсами на выходе реального импульсного элемента.
Реакция системы (звена) на воздействие типа дельта-функции называется импульсной переходной функцией, или функцией веса. Поэтому реакция формирующего элемента на дельта-функцию есть его функция веса.
Передаточная
функция формирующего элемента является
изображением в форме Лапласа от функции
веса
![]() :
:
![]() (6)
(6)
Формирующий
элемент, передаточная функция которого
определяется выражением (8), называют
фиксатором. Реакция фиксатора
![]() на модулированную последовательность
кратковременных импульсов (
на модулированную последовательность
кратковременных импульсов (![]() -функций)
-функций)
![]() показана на рис. 18.
показана на рис. 18.
Фиксатор, по существу, является преобразователем дискретных данных в непрерывные.
Во
многих практических случаях на выходах
реальных импульсных элементов перед
непрерывной частью системы применяют
фиксаторы (рис. 11, б). Фиксатор, по существу,
является преобразователем дискретных
данных в непрерывные, так как он позволяет
приближенно решить задачу преобразования
импульсного сигнала
![]() в непрерывный сигнал
в непрерывный сигнал
![]() .
.
Структурная
схема импульсного элемента с фиксатором
отображает динамические свойства особой
части импульсной автоматической системы
с учетом коэффициента усиления
![]() и периода повторения импульсов Т
(рис. 19).
и периода повторения импульсов Т
(рис. 19).

Рис. 19. Структурная схема импульсного элемента с фиксатором.