

9. Классификация сар по способу передачи сигналов управления, по стабильности параметров и алгоритму функционирования.
1.по характеру передачи сигнала управления:
1.1.Непрерывные САУ. Сигнал управления передается на ОУ не прерываясь.
1.2.Дискретные САУ (импульсные, цифровые). Сигнал управления при передаче прерывается на некоторое время.
1.3.Релейные САУ. Имеют существенную нелинейность.

2.по стабильности параметров динамических звеньев САУ:
2.1.Системы с детерминированными параметрами. Коэффициенты диф. уравнений неизменны,стабильны.
2.2.Стохастические САУ. Коэффициенты диф. уравнений могут изменяться со временем.
3.по характеру функционирования:
3.1.Обычные САУ.
3.2.Адаптивные САУ. Содержат контур адаптации. Приспосабливаются к условиям ведения тех. процесса.
а) Самонастраивающиеся САУ. Подстраивают свои коэффициенты звеньев с таким расчетом, чтобы компенсировать действия возмущений тех. процессов. Эти возмущения, как правило, параметрические.
б) Самоорганизующиеся САУ. Подстраивают свою структурную схему с тем, чтобы компенсировать действия возмущения ОУ.
в) Самоалгоритмизирующиеся САУ. Эти САУ изменяют свой алгоритм управления с целью компенсации действий возмущений ОУ (у+∆y=кх, где ∆y - возмущения)

г) Экстремальные САУ. Эти САУ находят экстремальные значения звеньев и работают в этой точке.
д)Терминальные системы. Компьютерная САУ. Компьютер управляет объектом.
10.Виды схем, использующиеся в сау.
1) Схема электрическая принципиальная
2) Схема функциональная
3) Схема структурная
1) СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой схеме м-но опред-ть все элементы, входящих в САУ. ххх ххх ххх эз. На схеме есть перечень элементов, входящих в систему.
2) СФ в ТАУ используется в построении структурной схемы. (Не охвачена ЕСКД и не является элементом рабочей документации, выполняется в виде рисунка) в прямоугольнике указ-ся название.направление действия сигнала.явл-ся предшественником структурной схемы.
примечание: в ЕСКД имеется схема с созвучным названием : сх. электрич-я функцион-ая- указ-ся электрические элементы отдельных функц-х элементов.
3) СС служит для изучения динамических свойств САУ. (для анализа и синтеза САУ: анализ - анализ устойчивости САР, синтез – выбор КУ). Элементами САУ являются динамические звенья и сумматоры.Динамич-е звенья опис-ся диф-ые уравн-ями в операторной форме. Динамические схемы изображаются в виде прямоугольников, имеющих входящую и выходящую стрелки. Стрелки показывают направления прохождения сигнала.Динамические звенья опис-ся дифурами в операторной форме.
примеч-е: в сист-е ЕСКД сх. электрич-ая структурная содержит электрич-е связи м/у элементами в структуре.Тау эту схему не использует.
11. Понятие о схеме электрической принципиальной (определение, назначение, пример).
СЭП дает полное представление о принципе работы установки, о составе элементов схемы САУ и их взаимодействии. Можно определить весь состав элементов, входящих в САУ.СЭП выполняется в соответствии с ЕСКД(единая система конструкторской документации).ЕСКД регламентируется ГОСТом. По этой схеме м-но опред-ть все элементы, входящих в САУ. ххх ххх ххх эз
СЭП САР скорости электродвигателя постоянного тока:
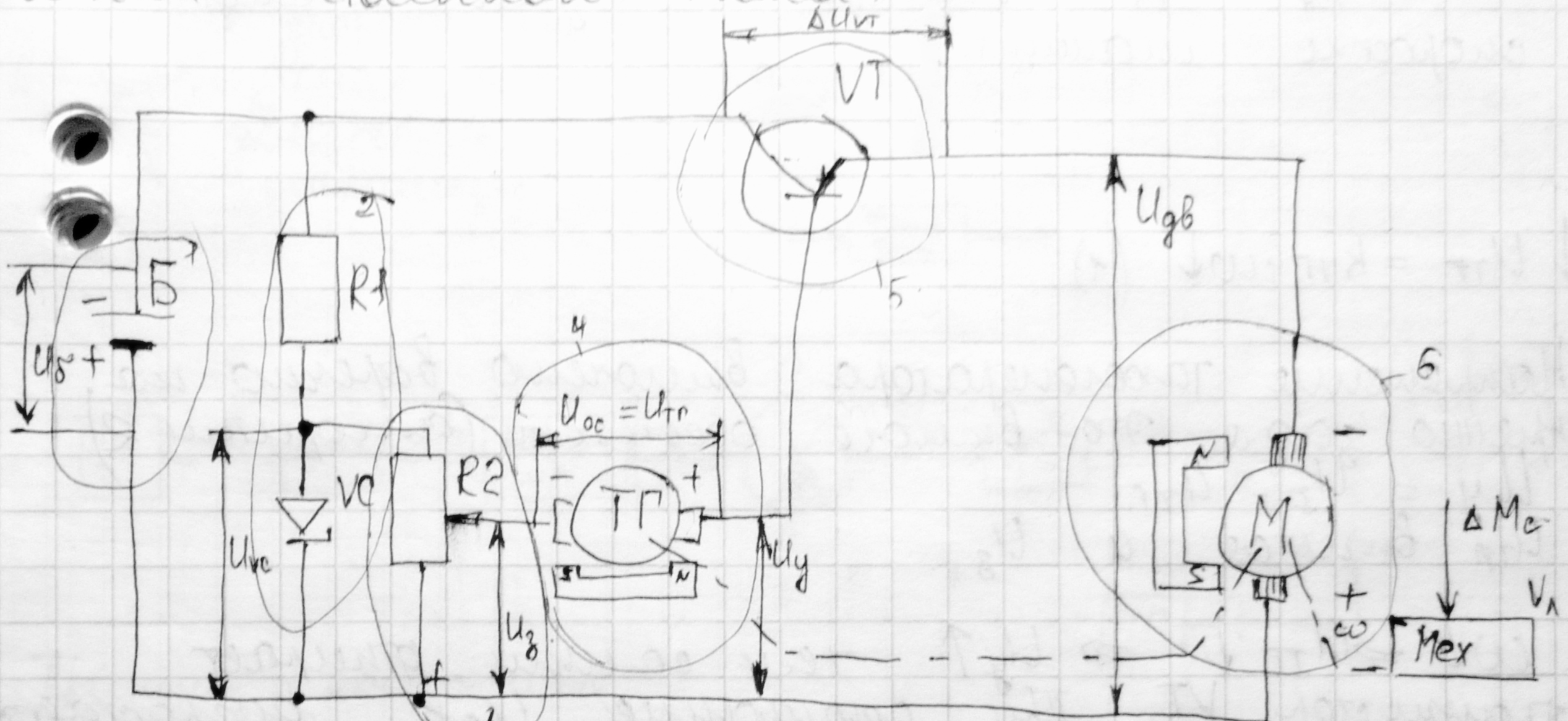
Б – батарея – источник энергии, тока
R1 – постоянный резистор
R2 – переменный резистор
VC – стабилитрон
VT – транзистор
М – электродвигатель
Мех – механизм, вращающий двигатель
Uб – напряжение батареи
Uз – напряжение задания скорости вращения механизма
Uvc-стабилизированное напряж-е стабилитрона.
w-угловая частота вращ-я.
Uтг-напр-е тахогенер-ра
Uу-напр-е управл-я
ДельтаМ-изменяющ-ся момент
Uос – напряжение обратной связи
Принцип работы схемы:
заданная скорость вращения двигателя задается величиной wз –> Uз. Двигатель должен вращаться с неизменной скоростью. Под действием момента сопротивления скорость двигателя может изменяться ∆w=10% от min, то звук будет неестественным. Поэтому к двигателю механически подключен тахогенератор вместе с изменением скорости машины, изменяется и направление ТГ.
↓Uтг = Ктг*w↓. Напряжение тахогенератора включено встречно напряжению задания.
Uу = Uз – Uтг. w↓=>↓Uтг=> Uу↑ тем самым отпирает транзистор VT.При отпирании Uдв возрастает. w = Kдв*Uдв
Назначение элементов схемы:
R1, VC – источник стабил-го напряжения.
Стабилизатор напряжения обеспечивает стабильность задающего напряжения.
R2 – резистор задатчик, задается величина скорости, при которой должен работать двигатель.
ТГ – тахогенератор, датчик о.с., датчик скорости вращения двигателя.Датчик преобразует мех. Величину вращения скорости в напряжение.
VT – устройство регулирования напряжения двигателя (преобразователь энергии).Преобразует энергию батареи в регулировочную эл. Энерг., подаваемую на двигатели. Двигатель- преобразует электрическую энергию в механическую.
12. Понятие о схеме функциональной (определение, назначение, пример).
1.Б – блок питания
2.стабилизатор напряжения
3.задатчик
4.датчик скорости, обратной связи
5.преобразователь энергии – транзистор
6.двигатель
7.механизм
Принцип
построения:

1.выделяются все функцио-ные блоки, рис-ся прямоуг-ки.
2.соединяются стрелочками, стрелки показывают направление прохождения энергии и сигнала управления.
Фун. сх-ма используется для построения структурной схемы.
13.Схема структурная (определение, назначение, пример).
Э
y

В прямоугольнике обознач. передаточная функция. Передаточ. функция показывает связь выходной координаты и управляющей, выраж. в операторной форме.
Y(p) = X(p)W(p) оператор Лапласа
Структурная схема- строгое мат.-ое описание управляющей и выходной координаты, представленное в графическом виде.
Структурная схема забирает из динамической элементы через которые проходит сигнал управления.

механизм, двигатель, ПЭ, С, ТГ
Uу=Uз – Uос
Звенья стр. сх. называют динамич. звеньями или элементарными звеньями. Элемент. звено имеет один вход, один выход. Выход. координата влияет на управляющую.
14. Статические характеристики звеньев САР.
СХ устанавливают связь между управляющей корд. Вых. Коод. В установившихся режимах.
Т.е. статическая хар-ка характеризуется коэф передачи звена.Он опр-ся как отнош-е приращение вых координаты к соотв приращ входн. Показывает наклон прямой.
К=∆у/ ∆х
Статич хар-ка не учитывает пер процессов. Она опр. По установл. Значениям у и х.
коэф передчи элемент звена определяется по его регулировочной хар-ке.
Перех. Из одного сост-я в др сост. Наз-ся перех. Процессом.Сост-е ОУ после окончания перех. Проц. наз-ся установившимся режимом.
Регулировочная хар-ка –это зависимость вых. Коорд от управляющей коорд. В установшихся реж-х.
Линеаризация-регулировочная хар-ка, превращ-е прямой в кривую.