

8. Подбор и расчет подшипников выходного вала
Определяем значения сил, действующих в зубчатом зацеплении [2, табл.6.1]:
Окружная:
Ft=2Т1*103/d1 (8.1)
Ft=2*0,049*103/43=2,28Н.
Радиальная для шестерни, равная осевой для колеса:
Fr=Fa=Ft*tgαcos![]() .
(8.2)
.
(8.2)
Fr=Fa=2,28*tg200cos100 51=0,82H.
Осевая для шестерни, равная радиальной для колеса:
Fа1=Fr2
=Ft*
tgαsin![]() (8.3)
(8.3)
Fа1=Fr2 =2,28*tg200sin10051=0,15H.
Составляем расчётную схему (рис. 8.1) и определяем суммарные реакции в подшипниках.
Составляем уравнения равновесия и определяем опорные реакции для выходного вала.
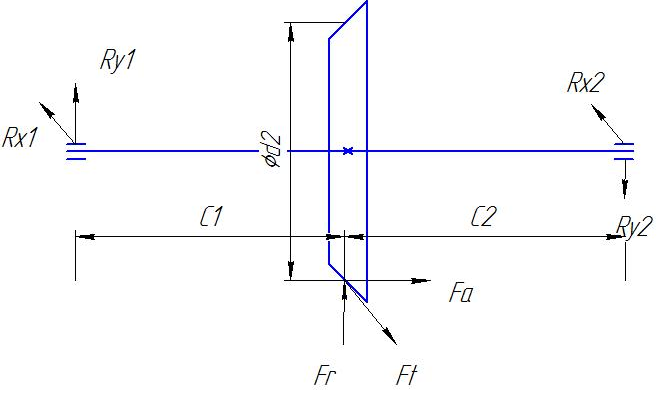
Рисунок 3. Расчетная схема ведомого вала.
Расстояние С1 и С2 берем из условия, что вал расположен в корпусе вертикально, и подшипники располагаются в корпусе редуктора. Границе корпуса редуктора намечаем с зазором 10 мм от торца ведомого зубчатого колеса и вершин зубьев ведомого. Тогда:
С1=b/2+10=30мм
С2 = 20+dае2=20+50,6=70,6мм
Определяем реакции:
- плоскость xz
![]() -Rx1(C1+C2)+Ft*C2=0
-Rx1(C1+C2)+Ft*C2=0
![]()
![]() Rx2(C1+C2)
- Ft*C1=0
Rx2(C1+C2)
- Ft*C1=0
![]()
Проверка
![]() Rx1+Rx2
– Ft
= 0
Rx1+Rx2
– Ft
= 0
1,6+0,68 – 2,28=0
- плоскость yz
![]() -Ry1(C1+C2)
- Fr*C2+Fa
-Ry1(C1+C2)
- Fr*C2+Fa![]() =0
=0

![]() -Ry2(C1+C2)+Fr*C1+Fa
-Ry2(C1+C2)+Fr*C1+Fa![]() =0
=0

Проверка
![]() Ry1
– Ry2
+ Fr
= 0
Ry1
– Ry2
+ Fr
= 0
- 0,38 - 0,47+0,85=0
Определяем суммарные радиальные реакции, Н:
![]() .
(8.4)
.
(8.4)
![]()
![]() .
(8.5)
.
(8.5)
![]()
Наиболее нагруженной опорой является опора 1.
Для обоих валов выбираем шариковые радиальные однорядные подшипники сверхлёгкой серии. Выбираем типоразмер подшипников по величине диаметра d внутреннего кольца, равного диаметру ступеней вала под подшпники.
Вал II - подшипник 1000900, ГОСТ 8338-75.
Вал III– подшипник 1000900, ГОСТ 8338-75.
Расчётная долговечность подшипников L10h определяется по формуле [2, с.140]:
![]() ,
(8.6)
,
(8.6)
где Lh - требуемая долговечность подшипника (по заданию срок службы механизма Lh =18000 ч);
RЕ - эквивалентная динамическая нагрузка, Н;
m - показатель степени: m=3 для шариковых подшипников;
а1 – коэффициент надёжности. При безотказной работе а1=1;
а23 – коэффициент учитывающий влияние качества подшипника и качества его эксплуатации. При обычных условиях работы для шариковых подшипников принимаем а23= 0,8;
n - частота вращения внутреннего кольца подшипника, соответствующая частоте вращения выходного вала, об/мин;
Cr – динамическая грузоподъемность, Н.
Определяем рассчётную долговечность подшипников.
Частота вращения кольца подшипника n=370об/мин. Осевая сила в зацеплении Fa=0,82Н. Реакции в подшипниках R1=1,64H. Характеристика подшипников1000900: Cr=2500Н; V=1; Кб=1,1; Кт=1; а1=1; а23=0,8. Подшипники установлены по схеме враспор.
Определяем соотношения [2, с.150]:
![]() ;
;
![]() .
.
По табл. 9.2 [2] находим е=0,19; Y=2,3.
По соотношению
![]() выбираем соответствующую формулу для
определения эквивалентной динамической
нагрузкиRЕ
[2, табл. 9.1]:
выбираем соответствующую формулу для
определения эквивалентной динамической
нагрузкиRЕ
[2, табл. 9.1]:
RЕ=(XKkRr+YRa)KбKт , (8.7)
где Rr – радиальная нагрузка на подшипник (суммарная опорная реакция), Н
Ra- осевая нагрузка подшипника, Н
Х-коэффициент радиальной нагрузки, Х=0,56 для радиальных
шарикоподшипников;
Y – коэффициент осевой нагрузки;
Kk - коэффициент вращения, при вращении внутреннего кольца Kk = 1;
Kб – коэффициент безопасности, учитывающий характер нагрузки.
При переменной нагрузке Kб =1,3;
Kт - коэффициент, учитывающий влияние температуры на
долговечность подшипника. При t≤1000C Kт 1,0.
RЕ2=(Х*V*R1+Y*Fa)*Кб*Кт=(0,56*1*1,64+2,3*0,82)1,1*1=3,08Н.
Определяем динамическую грузоподъемность:
 .
(8.8)
.
(8.8)

Долговечность подшипников обеспечена.